固体捆绑火箭助推分离仿真研究
2019-02-19张卫东刘玉玺
张卫东,韩 伟,刘玉玺
(1. 上海航天技术研究院,上海,201109;2. 上海宇航系统工程研究所,上海,201109)
0 引 言
运载火箭作为一种天地运输工具,是将有效载荷送入预定轨道的飞行器[1]。为提高运载能力,目前世界各国普遍采用捆绑火箭的方案。捆绑火箭有2种形式:一种是以俄罗斯、中国为主,捆绑液体助推;另一种是以欧美国家为主,捆绑固体助推。随着运载技术的发展,中国也逐渐开展了大型固体捆绑运载火箭的研究。
固体捆绑运载火箭可以增加火箭的有效负载能力。但是,确保运载火箭芯级与固体助推的安全分离,是固体运载火箭研制的一项关键技术。在运载火箭分离过程中,存在火箭芯级和助推级的相对运动,并且在运动过程中不可避免地存在芯级和助推级的干扰与分离现象,这就需要对火箭芯级和助推级的分离过程、助推级在分离过程中受到的气动力及助推级的分离轨迹进行预示和分析[2,3]。文献[4]模拟了火箭助推和芯级的自由分离过程和附加外力作用下的强迫分离过程,通过算例验证其采用的重叠网格方法适用于运载火箭流场的数值模拟;Rajeev等[5]基于刚体模型建立了增压助推火箭平面分离的动力学模型,分析了若干参数对分离过程的影响。
本文从工程实现的角度,研究了固体捆绑火箭的分离安全性。首先,建立了固体助推的六自由度模型,通过六自由度仿真,模拟助推分离过程中,助推和芯级的运动形式;其次,分析了固体助推分离过程中主要影响因素,并仿真分析了分离对姿控的影响。根据固体助推不同分离工况,给出固体助推不同分离工况下的分离规律。
1 固体助推的六自由度建模
固体助推器质心动力学方程为
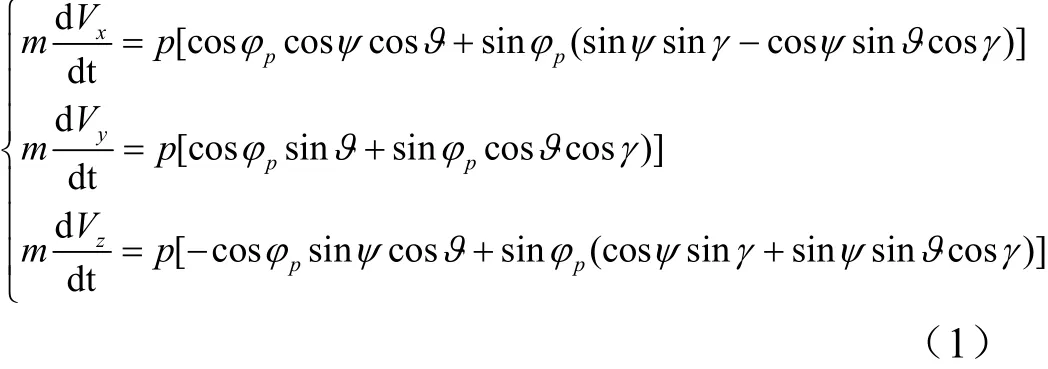
式中 m为分离体质量;iV(,,ixyz=)为3个方向的速度;p为分离时刻分离体受到侧推火箭推力、发动机推力及气动力等外力合力;γ,ψ,ϑ分别为分离体在惯性坐标系下的滚转角、偏航角和俯仰角;pϕ为分离体合外力与箭体轴向的夹角。
固体助推器绕质心动力学方程为

式中 ωi(i=x,y,z)为分离体角速度分量;Ixx,Iyy,Izz和 Ixy, Iyz, Izx分别为分离体刚体坐标系下的转动惯量和惯性积。分离体在惯性坐标系中的姿态角方程为

2 固体助推分离仿真与分析
2.1 固体助推分离仿真
根据固体捆绑火箭的特点,固体助推器分离要求如下:a)偏差工况下分离过程无干涉;b)助推器横向分离速度大于 5 m/s;c)助推器横向分离角速度为(15±5) (°)/s;d)助推器分离时不得与芯级相碰撞;e)助推分离过程中保持箭体姿态的稳定。
为了达到这些要求,火箭需要安装侧推火箭,侧推火箭需要相对箭体对称安装。本文针对固体捆绑火箭助推分离的过程,建立包含系统的物理模型与数学模型的虚拟样机进行动力学仿真。利用PROE软件构建助推器与芯级三维实体模型,如图 1所示。通过mech/pro接口导入至Adams软件,在仿真模型中赋予分离体相应的质量特性,将分离外力加载至分离体,设置侧推火箭作用力、气动力及发动机后效推力等矢量。
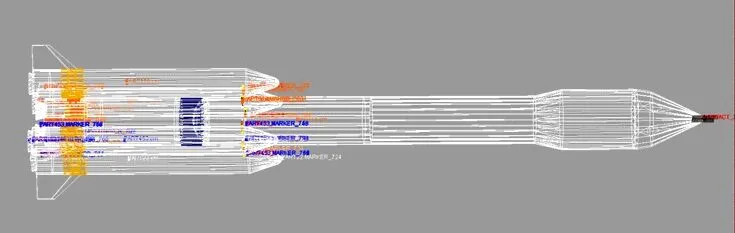
图1 仿真计算模型Fig.1 Simulation Model
由于固体发动机无法实现定时关机,助推器分离采用室压判定分离时间,助推器分离时受到发动机后效推力影响,还需对捆绑机构接触部件按照材料属性设置相应接触关系,以验证不同过载工况下捆绑机构分离情况。
2.2 推力线偏斜对分离影响
分离装置安装时推力线应与芯级偏斜一定角度,尽量减少或避免羽流对芯级的破坏。推力线偏斜的设计将会给侧推火箭的分离能量带来损失,因此角度值不会很大。当夹角为20°时,侧推火箭分离能量损失为6%;当夹角为40°时,侧推火箭分离能量损失将达到23%,随着侧推火箭推力作用线偏斜角度进一步增加,侧推火箭分离能量损失将急剧增加。
图2为固体捆绑火箭几种推力线偏斜角羽流示意,侧推火箭分别安装在固体助推器前过渡段和尾段。从图2中可以看出,偏斜角越小,侧推火箭羽流对芯级干扰越大。为减小侧推火箭羽流对芯级干扰,侧推火箭推力线角度应不低于30°。
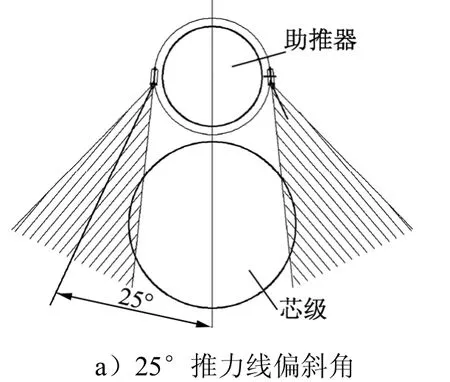
图2 侧推火箭羽流示意Fig.2 Plume Diagram of the Side-push Rocket

表1给出几种不同组合下某固体捆绑助推器分离仿真计算结果。

表1 4种不同组合分离速度与分离角速度Tab.1 Separation Velocity and Angular Velocity of Four Different Combinations
从表1可以看出,侧推火箭推力线偏斜对分离速度影响不大,4种方案下横向分离速度都大于6 m/s,而推力线偏斜对助推器横向分离角速度影响较大。考虑减小侧推火箭羽流对芯级干扰及适应偏差状态助推器分离,采用前过渡段40°、尾段35°推力线偏斜角度较为合适。
2.3 仿真结果
仿真时间段从侧推火箭点火到反推火箭工作结束,助推器横向分离速度最终为6.8 m/s,助推器横向分离角度为16.7 (°)/s,助推器与芯级间相对分离距离为1.99 m,捆绑机构球头球窝在解锁60 ms内分离,分离过程安全。分离过程中各项参数如图3所示。

图3 仿真结果Fig.3 Simulation Results
2.4 故障模式分析
运载火箭捆绑多枚助推器,从提高全箭分离可靠性角度考虑,在一枚侧推火箭失效故障模式下,助推器应能安全分离。根据分离仿真分析,助推器在一枚侧推火箭失效情况下会造成较大的滚动角速度,但仍能够安全分离。图4、图5分别示出了前段或尾段分别有一枚侧推火箭失效情况下分离计算结果,两种故障状态下均能安全分离。

图4 前过渡段一枚侧推火箭失效Fig.4 Failure of a Side-push Rocket in the Front Transition Section
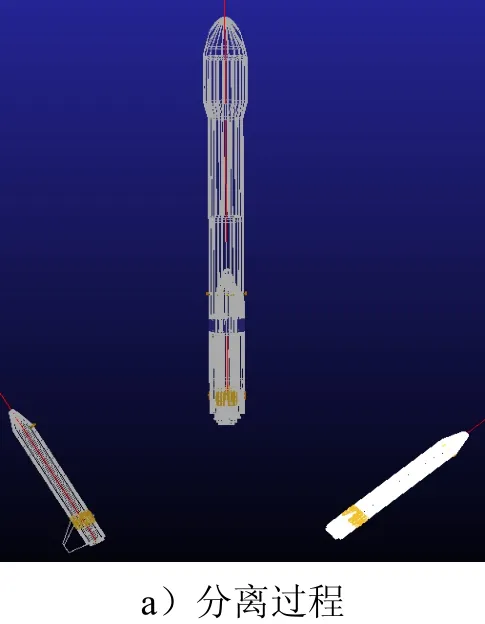
图5 尾段一枚侧推火箭失效Fig.5 Failure of a Side-push Rocket in the Tail

续图5
2.5 固体助推分离对姿态控制影响
运载火箭绕质心运动是姿态控制系统的控制对象,包括芯级的刚体运动、发动机摆动运动等。固体助推器成组分离,当第1对助推器分离时,侧推火箭羽流近乎全部作用于芯级和相邻助推器上,如存在侧推火箭推力偏差,则会对芯级姿态产生影响。
大量的分离仿真表明,在侧推火箭0.6 s的作用时间内,助推器轴向及径向位移均较小,近似认为助推器在侧推火箭工作时间内与芯级未发生相对位移。根据试验数据,同组侧推火箭的推力偏差小于5%,干扰力作用点分别为前后侧推火箭理论中心位置。当一枚侧推火箭失效时,侧推火箭对滚动方向的干扰力矩最大为12 158.8 N·m。根据以上干扰对分离后芯级的姿态进行仿真,仿真结果如图6所示。
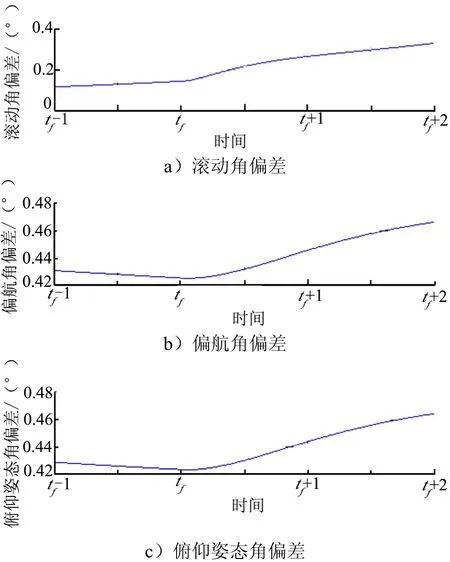
图6 分离前后三通道姿态角变化曲线Fig.6 Three-channels Attitude Angle Curves Before and After Separation
将分离干扰代入到姿态动力学方程,形成绕质心的角速度,积分后获得姿态角,姿态角变化情况如图6c所示,其中,ft为分离时间。由图6可知,分离前后姿态角有一定的变化,但变化较小,说明固体助推分离对姿态角影响较小,在一枚侧推火箭失效工况下,芯级姿态仍可控。
3 结束语
本文建立了固体助推分离的六自由度仿真动力学模型,通过模拟仿真获得固体助推分离的速度和位置,同时仿真分析了助推器分离过程中芯级姿态变化情况。研究结果表明,六自由度仿真模型能够有效模拟固体助推与芯级的分离,虚拟样机仿真和动力学数值仿真相结合是研究固体捆绑助推分离的一种可行的方法。
