基于数字信号处理的超声手术刀电源控制电路设计与实现
2019-02-14续大伟董昊堃
葛 琴 续大伟 董昊堃
超声手术刀采用超声能量来切除和分离身体内病变组织和器官,从而达到手术治疗的效果。该设备通常由电源、振动系统以及其他的设备组成。由于超声手术刀的工作频率会随着乳化组织的变化而发生改变,因此如果超声手术刀不能一直在谐振频率上工作,其内部的发热就会消耗大部分的能量,甚至因内部过高的温度而损坏手术刀[1]。超声电源提供电压来驱动超声手术刀,故系统需要保持工作在谐振状态,只有及时调整超声电源的频率,才能产生最好的效果。为此,本研究基于数字信号处理(digital signal processing,DSP)的超声手术刀的硬件控制系统,自主设计一款超声手术刀电源控制系统,及时调整电源的频率,使超声手术刀在谐振状态上工作,减少能量的消耗,维持手术刀的温度。
1 超声手术刀电源控制电路系统分析
超声手术刀主要由超声功率源和超声振动系统两个部分组成,工作频率为20~30 kHz,超声振动系统包含超声换能器、变幅杆和治疗头3部分[2]。
1.1 超声换能器的谐振频率特性
超声换能器采用压电陶瓷制作,其工作频率在20 kHz左右。为了更好的确定超声刀的电路参数,需要研究超声手术刀换能器在谐振频率附近的工作特性。在谐振频率的附近,压电元件的电特性如图1所示。

图1 压电元件等效电路图
中心频率可表示为公式1:

式中Z为压电元件等效电路的中心频率,R1为阻抗,L1为感抗,C0为并联谐振的容抗C1为串联谐振的容抗。
一般情况下,R1很小,假设逼近0,其计算为公式2:

1.2 频率自动跟踪的依据
超声换能器自动跟踪目前有两种方案,即电流反馈方案和相位差反馈。电流反馈法进行频率跟踪,采用的是检测谐振电流的方法,换能器电路可以具体等效成RLC串联电路,如果检测到电路当中的电流幅值处于最大值时,其电路系统在谐振状态工作。因此,通过检测电路当中电流的幅度能够在一定频率范围内判断电路是否工作在谐振状态。但是在很多的情况下,换能器当中的反馈电流谐波分量会干扰博兴,检测仪器很难仅仅通过检测电路的电流的峰值来判断电流大小,因此还需要结合电流的相位计算出电流的有效值,从而能够更加准确的判断出频率的谐振点的位置[3]。设计的电源控制电路采用了串联回路电流的有效值作为谐振点的主要判断依据。
1.3 调整输出功率的方法
在实际的医疗手术当中,超声手术刀刀头上的压力大小经常改变,其压力的变化会导致系统输出功率的改变。为了使超声手术刀在稳定可靠的环境下工作,就要求超声手术刀的刀头具有恒定的输出功率。此外,还需要根据治疗方案确定患者超声辐射的计量,因此,就要求能够调整手术刀的输出功率[4]。采用数控半桥脉冲输出调整电路来控制超声电源输出信号的占空比,从而实现调整功率的功能。
2 基于DSP的控制系统硬件电路的设计
超声电刀电源系统的设计是以DSP作为核心的控制芯片设计,作为实现超声手术刀电源控制的基础,DSP需要充分发挥其具有的高速度的运算优势以及集成化的功能模块,需要按照合理的设计方案设计硬件电路[5]。超声电刀电源系统硬件电路主要包含:①电源电路模块;②超声信号发生电路;③DSP最小系统;④功放电路;⑤外围接口电路。超声电源系统的总体架构如图2所示。
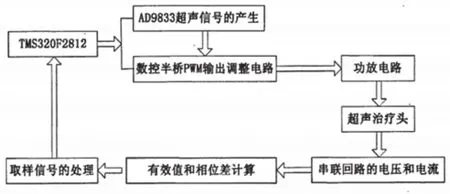
图2 超声电源系统总体架构框图
2.1 电源电路
供电的电源电路是整个系统的基础,在本系统当中,采用了±5 V、±12 V和32 V的电压,其中5 V的电压用来给芯片和DSP的电源转换芯片供电,±12 V电压作为运算放大器的输入电压,32 V电压是功放电路的工作电压[6]。电源电路的核心是LM78/79XX系列固定输出的三端稳压器件(美国国家半导体公司),采用LM78/79XX系列三端稳压器件设计的稳压源,具有比较少的外围电路结构,仅需要2个外部电阻即可设定外部电压[7]。电源电路的内部电路结构如图3所示。
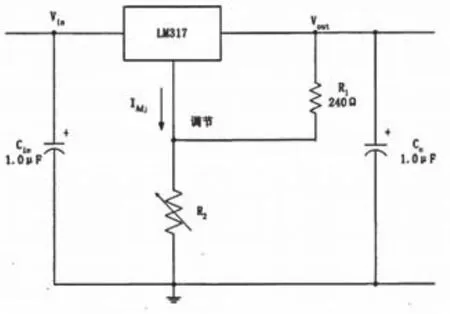
图3 稳压电源电路结构图
稳压电源电路的输出电压可表示为公式3:

电源电路系统当中外部电阻分别为:R1=254 Ω,R2=5.9 kΩ,根据公式(3)能够计算得到公式4:

2.2 DSP最小系统
目前,世面上尚无一款处理器能够适用在绝大数的电源管理系统的应用上,因此需要综合的考虑本系统的核心芯片[8]。要计算出采样电路当中电流的相位和有效值之间的关系的数字/模拟接口,要能够计算采样电流有效值和相位差之间具体关系的数字/模拟转换口;要有一个定时器能够很好的执行控制程序。本系统设计的超声手术刀工作频率设定为20 GHz,对于芯片的工作速度提出了很高的要求。基于上述的考虑,本系统采用了TI公司的TMS320F2812作为系统的核心芯片。TMS320F2812兼顾了外围接口以及内部运算处理两方面的能力,采用了高性能的静态金属氧化物半导体(complementary metal-oxide semiconductor,CMOS)元件技术,主频能够达到150 MHz,并且具有比较低的功耗[9]。片内具有丰富的存储器,有高达128 K×16的闪存和只读存储器,以及1 K×16的一次性可编程存储器;片上外设也相当的丰富,主要有2×8通道12位数字/模拟转化器,2路的串行通信接口以及1路的串行外设接口[10]。
2.3 超声信号产生电路
初始的设计方案仅采用了DSP来直接产生频率为20 kHz的超声信号,然后通过功率放大器给超声手术刀提供具有相同频率的机械振动,在提供信号的过程中需要用到锁相结合以及扫频的方法,扫频过程当中的步进精度关系到频率调整的精度,按照直接合成信号的方案,如果假设DSP事件管理器的时钟频率为75 MHz,那么定时器周期寄存器为75 M/20 K才能产生20 kHz的方波频率[11-12]。如果需要减小方波的频率,其周期值就需要增大,设最小的步长为1,即f=19.994 kHz,也就是调整频率的步长至少为6 Hz,扫描步长则需要精确到1 Hz,如果直接采用DSP产生频率信号将达不到这样的精度需求,因此改为采用DSP控制DDS芯片产生方波信号[13-14]。
3 超声手术刀电源控制电路测试分析
通过设计制作基于DSP的超声电源控制系统,为了使电路的性能达到要求,需要对电路控制功能以及系统的工作性能进行测试,在测试的过程当中需要用到数字万用表、60 MHz的示波器以及代码调试器(code composer studio,CCS)平台。对电路以10 Hz的步长从20 kHz扫频到21 kHz,观察电流和电压的有效值等参数的变化趋势[15]。如图4所示。

图4 超声电源控制系统测试结果图
图中A显示,在谐振频率之前,电流的有效值缓慢的上升,在谐振点处处于最大值,然后迅速的减小到最低点,然后再缓慢的上升,在20.67 kHz处电流达到最大值,为686.7 mA,同时图中B和C显示,此时其电压和电路的相位差接近为0,图中D显示为有功率最大为3.69 W。在谐振点处,每个参数的变化速度很快,如果采用单一的量来进行追踪,在扫描步长过大的情况下会直接跳过谐振点,从而造成谐振点的缺失。反馈信号采用相位和电流有效值,频率的自动跟踪结合步长,能够在缩短跟踪时间的情况下提高扫描的精度[16]。
4 结语
本研究在理论分析的基础上,以DSP为核心设计了一套超声手术刀电源控制系统,根据应用中DSP的工作频率以及系统对于准确度提出的要求,采用了DDS芯片作为超声频率信号的信号源,反馈信号采用电路当中电流的有效值和电压电流相位差,频率的自动跟踪结合步长扫频法。对系统的功能进行验证后的结果表明,系统的设计指标均能够达到预期的功能,能够使系统在谐振状态下工作。
