多频外辐射源雷达无人机探测实验研究
2019-02-13
(1.武汉大学电子信息学院, 湖北武汉 430072; 2.同方电子科技有限公司, 江西九江 332007)
0 引言
近年来,随着无人机产业的快速发展,无人机在军事和民用领域均得到了广泛的应用。但由于相关法规尚不健全,监管缺失,无人机“黑飞”事件屡屡发生,给民航机场、敏感目标以及重大活动安全保障带来了严重隐患。解决无人机的监控与管制问题已日益成为维护国家、公众安全和社会安全的重要保障[1]。目前,针对该“低慢小”目标的监控手段主要包括无线电侦测、飞控协议侦听、主动雷达、光电红外、多照射源被动雷达等[2]。其中外辐射源雷达作为一种绿色环保、经济安全的被动式探测手段近年来获得学术界的广泛关注[3-7]。它是一种利用第三方发射的电磁信号来探测目标的新体制雷达[8]。目前可利用的辐射源非常广泛,包括FM广播、DAB、DVB-T、DTMB、CMMB、LTE、WiFi等多种类型[9-14]。相关的实验报道也证实了该体制雷达利用不同频率信号探测无人机的可行性。文献[15]中利用1.8 GHz的GSM信号成功探测到无人机,文献[16]借助3G移动信号,研究了无人机在不同飞行状态时的多普勒特性,文献[17]基于数字电视信号开展了无人机探测实验并成功连续地探测到目标。不同频率的照射源在距离覆盖、分辨率性能和应用环境上有各自独特的优势。丰富多样的照射源也为外辐射源雷达向多频体制发展提供了便利。
对UHF频段信号而言,无人机尺寸一般与波长相当,处于散射能量的谐振区。无人机运动姿态或航向较小的变化也会引起雷达散射截面(Radar Cross Section,RCS)的显著变化,使得回波信噪比出现较大幅度起伏。而且由于无人机体积小、机动性强、飞行高度低,回波功率也容易受到入射角度、地面反射、建筑物遮挡等因素影响,导致雷达在探测稳定性和跟踪连续性上表现出不足。根据RCS随频率变化的特点,多频融合在提高目标检测概率方面存在优势,多个频率检测结果融合可实现点迹互补。而且利用不同发射站的多个频率信息,还可以提高目标定位精度,增加航迹连续性。
本文围绕多频外辐射源雷达无人机探测实验展开讨论。首先建立无人机三维模型,仿真其RCS频率特性,然后提出了针对无人机探测的多频检测方法。最后结合仿真和实测结果分析了飞行姿态、信号频率等因素对无人机RCS和回波信噪比的影响。
1 无人机三维建模与RCS仿真
RCS是实现雷达目标探测、分析回波特性的重要参数,它与目标的材质和尺寸有关,并且会随着雷达观测角度和频率发生变化[18]。对于形态复杂的目标,可以认为由多个独立的散射体组成,各个部分之间没有相互作用,此时目标总的RCS就是各部分RCS的矢量和。假设第i个散射体到雷达的距离为Ri(θ),相应的RCS为σi,则目标总的RCS为
(1)
从式(1)可知,照射源频率会对每个独立小散射体的RCS产生影响。将上述的RCS幅值代入雷达方程,便能大致估算目标回波信号强度。双基地雷达测量所得到目标回波功率可表示为
(2)
式中:Pt为平均发射功率;Gt,Gr分别为发射天线和接收天线增益;λ为波长;σ为双基地雷达目标RCS;Rt为目标到发射站的距离;Rr为目标到接收站的距离。从式(2)可知,照射源频率除了会影响无人机的RCS从而影响回波功率外,还将直接影响到雷达接收功率的大小。
在实际飞行过程中,无人机的RCS是关于频率和角度的复杂函数,一般通过电磁仿真软件计算或者在微波暗室中测量。目前国内外关于无人机RCS的研究主要集中在静态测量和仿真[19-21]。本文利用电磁仿真软件对大疆精灵四无人机建模,如图1所示。机身和桨叶采用塑料材质(聚苯乙烯),介电常数分别设置为2.4和3。转动的电机为理想金属,通过在无人机内添加金属材质以模拟机身内部导线、PCB板、支架和天线等器件。基于图2的空间坐标系对无人机仿真,设定发射站方位角φT=184.60°,θT=89.13°,接收站方位角φR=123.48°,θR=93.97°。无人机位于坐标原点处,俯仰角Pitch=0°,翻滚角Roll=0°,航偏角Yaw从0°逐渐旋转到180°,得到图3不同频率下RCS-角度扫描结果。仿真结果显示,在UHF波段内,同一飞行角度下不同频率间RCS差别较大,且角度变化时不同频率的RCS变化趋势也不尽相同。因此从目标散射特性出发,多频探测相比常规的单频探测而言更能克服RCS起伏所带来的影响。
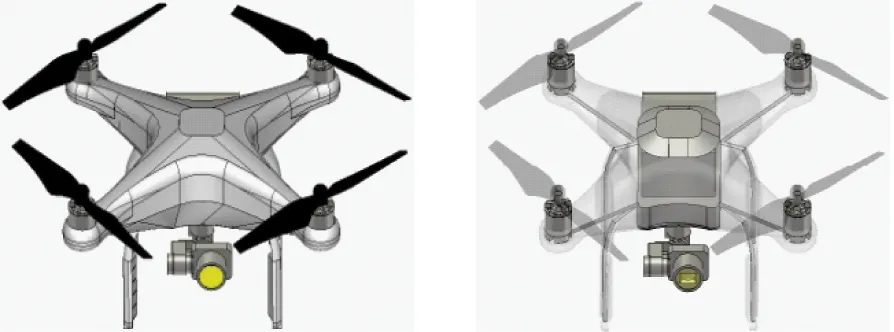
图1 无人机三维建模

图2 无人机电磁仿真坐标系

图3 无人机RCS随航偏角变化仿真结果
2 多频检测方法
多频信号检测,一般要求同一个目标在不同频率的距离多普勒谱上有相同的距离单元和多普勒单元。在数字电视外辐射源雷达系统中,电视信号带宽均为8 MHz,因此不同频率信号的距离分辨率相同。但由于目标运动引起的多普勒频移为
(3)
式中,v表示目标速度,f表示信号频率,β表示双基地角,δ表示目标速度方向与双基地角平分线的夹角。由式(3)可知,对于不同频率入射信号,目标的多普勒频移不相等。考虑多个频率的情况,式(3)可写成:
(4)
式中,Tm表示第m个频率的积累时间,pm表示第m个频率的多普勒分辨单元。为满足不同频率的多普勒分辨率相等,即p0=p1=…=pM-1,积累时间Tm需满足下式:
T0f0=T1f1=…=TM-1fM-1
(5)

(6)

图4 多频检测方法示意图
3 实验结果
3.1 实验方案与配置
武汉大学利用数字电视外辐射源雷达系统开展了无人机多频探测实验。实验场景和配置如图5所示。发射站为武汉龟山电视塔(发射546 MHz和618 MHz电视信号,均为8 MHz带宽),接收站距离发射站北偏东104.4°,7.5 km处。参考天线对准龟山发射站,监测阵列指向北偏东60°的探测区域。雷达接收系统配置为多频工作模式,同时采集546 MHz和618 MHz的电视信号。使用大疆精灵四无人机作为合作目标在雷达阵列前方飞行,同时记录下无人机GPS飞行轨迹用于和雷达检测结果对比。

图5 无人机多频探测实验场景
3.2 实验结果分析
图6(a)、(b)分别为第80 s,546 MHz和618 MHz目标的多普勒谱,此时无人机正变速转向,飞行姿态变化较大。546 MHz的多普勒谱上目标的信噪比微弱,已淹没在杂波当中;618 MHz的多普勒谱上仍能明显地观测到目标。此时仅利用546 MHz的电视信号已无法正常检测出目标峰值,可利用618 MHz检测结果进行信息互补,提高检测概率并且保持点迹连续性。

(a) 546 MHz目标多普勒谱

(b) 618 MHz目标多普勒谱图6 第80 s 546 MHz和618 MHz处理结果
将GPS记录的无人机距离和姿态角信息,代入第1节的三维模型中,仿真得到图7无人机实际飞行时的RCS变化曲线。结合图8的姿态角信息可发现,平稳直线飞行时546 MHz的RCS要大于618 MHz的RCS。在第76~95 s无人机转向时由于Yaw和Pitch角发生了剧烈变化,两个频率的RCS仿真结果均出现了较大幅度起伏,此时两者的RCS幅值趋于相同。仿真结果表明,不同频率信号入射时无人机的RCS会有明显差异,而且飞行姿态变化时也会使RCS发生波动。

图7 不同频率RCS仿真结果

图8 无人机姿态角变化情况
进一步分析不同频率下无人机的回波特性,将仿真得到的RCS结果、双基距离、系统增益等信息代入到第2节的回波信号模型中,得到图9的信噪比仿真曲线,与图10的无人机实测信噪比曲线比较,两者的变化趋势基本吻合。在近距离直线飞行时,由于低频信号的RCS更大、传播损耗更小,546 MHz的目标信噪比明显高于618 MHz。随着无人机逐渐远离收发站,两个频率的信噪比逐渐趋于一致,甚至会出现618 MHz信噪比略高于546 MHz的情况。在无人机转向时,546 MHz和618 MHz的RCS均出现大幅度起伏,目标信噪比也因此发生了抖动。

图9 无人机信噪比仿真结果

图10 雷达检测目标信噪比
采用第2节所述的多频检测方法,将融合后点
迹与无人机GPS飞行航迹对比,结果如图11所示。无人机从第1~75 s逐渐远离接收站,在第76~ 95 s之间拐弯转向,在第96 s以后逐渐返回接收站。图11(a)中雷达检测结果与无人机GPS记录的航迹基本吻合,图11(b)、(c)中目标运动规律与无人机一致,两频率融合后能较连续地检测到目标,证明了多频探测的有效性。图12(a)为扣除距离因素后546 MHz 和618 MHz 的信噪比,图12(b)为多频检测后目标信噪比。相比单个频率的结果,多频检测具有频率互补的优势,融合后目标信噪比更为平稳,能更好地缓解照射源频率、无人机姿态变化等因素对目标RCS和信噪比的影响。

图11 多频检测点迹与无人机GPS航迹对比结果

(a) 546 MHz和 618 MHz目标信噪比

(b) 多频检测目标信噪比图12 补偿距离因素后目标信噪比
4 结束语
本文从目标散射特性出发研究了不同频率照射源探测性能上的差异,并利用多频检测方法优化了检测结果。实测结果表明,利用多个频率的检测结果进行融合,相比于单频检测而言可以使目标信噪比更加平稳,使雷达探测性能更加稳定。后续将利用更多发射站的不同频率照射源开展无人机探测实验,优化多频融合算法,进一步提高雷达探测性能。
