临近空间高超声速飞行器目标特性及突防威胁分析
2019-02-13余协正陈萍萍刘国生杨梅森
余协正,陈 宁,陈萍萍,陈 亮,刘国生,杨梅森
(中国航天科工集团8511研究所,江苏 南京 210007)
0 引言
临近空间一般是指距地面20~100 km的空间区域,主要包括大气的平流层大部、中间层全部和部分热层,处于现有飞机的最高飞行高度和卫星的最低轨道高度之间。能够以高超声速(Ma数>5)在临近空间高度进行持续飞行且能完成指定任务的飞行器,称为临近空间高超声速飞行器[1]。目前,世界主要工业强国都对临近空间高超声速飞行器投以相当的研究精力,临近空间高超声速飞行器已经从早期的概念与原理探索阶段逐步进入到以高马赫数作战飞机、导弹为应用背景的先期技术开发与演示验证阶段。可以预见,随着临近空间高超声速飞行器的快速发展,临近空间的攻防对抗也将拉开序幕并呈现日趋激烈的态势。虽然临近空间高超声速飞行器具有机动灵活、高速飞行等优势,且从当前防空武器及天基武器的覆盖范围可知,临近空间处于各种空天武器的拦截能力之外[2],但这并不意味着临近空间高超声速飞行器不可探测和拦截。相反,由于高超声速飞行器飞行速度高,与空气高速摩擦使自身红外辐射特性明显增大,目标可探测距离会大大增加;与此同时,临近空间高超声速飞行器在无动力滑翔或巡航段弹道的飞行时间较长,留给拦截系统的时间窗口较大,在该段成功实施拦截的可能性更大[3]。
本文通过对临近空间高超声速飞行器两种典型技术体制的对比,分析了不同体制临近空间高超声速飞行器的目标特性及其与传统弹道导弹和巡航导弹的差异,并对临近空间高超声速飞行器当前及将来可能面临的突防威胁进行梳理与分析。最后提出在临近空间高超声速飞行器研制过程中,必须同步考虑适用于临近空间高超声速飞行器的突防技术措施和突防装备。
1 临近空间高超声速飞行器典型技术体制介绍
目前,临近空间高超声速飞行器按飞行动力来源主要分为两大类[4]:第一类是高超声速助推-滑翔飞行器,如美国开展演示验证项目HTV-2,AHW高超声速助推-滑翔飞行器;第二类是高超声速助推-巡航飞行器,如美国开展演示验证项目X-51A高超声速助推巡航飞行器。下面分别以美国的HTV-2和X-51A为典型代表介绍两类不同体制临近空间高超声速飞行器的相关情况。
1.1 高超声速助推-滑翔飞行器
HTV演示验证项目是由美国空军和DARPA共同承担研制的[5]。HTV项目的目的是发展验证高超声速飞行器技术,以支撑快速全球到达任务,其发展的飞行器是可重复使用的类航空器外形的高超声速飞行器,能够在普通机场起飞和降落。HTV项目始于2003年,是美国全球快速打击计划的重要项目,计划演示验证三种飞行器:HTV-1、HTV-2和HTV-3。HTV-3飞行器由于2009年美国国会削减财政预算而被迫搁浅,DARPA只好转而开发HTV-2。HTV-2是FALCON项目中研制的第二代飞行器,属于无动力高超声速飞行器。HTV项目涉及到高升阻比气动外形技术、轻质高温材料技术、热管理技术、导航和自动飞行控制技术以及涡轮组合循环发动机(TBCC)技术等众多关键技术。2010年4月,HTV-2进行了首次发射,以飞行速度Ma数17~22飞行了139 s。2011年8月11日,美军在加利福尼亚州范登堡空军基地再次利用“牛头怪”-4 Lite火箭(如图1所示)将HTV-2发射升空。与火箭成功分离后,利用直接力控制系统再入,经过再入段、拉升段,HTV-2任务按计划进展,进入滑翔段,后因无法获得飞行器的遥测信号而失败。在失去信号前,DARPA收集到了约9 min有价值的飞行数据。HTV-2试验飞行器如图2所示,整体为乘波体构型,飞行器总长为3.05 m,最大宽度为1.17 m,总质量为908 kg。HTV-2飞行试验规划的飞行剖面如图3所示。

图1 试飞前“牛头怪”-4 Lite火箭和HTV-2高超声速飞行器

图2 HTV-2高超声速飞行器
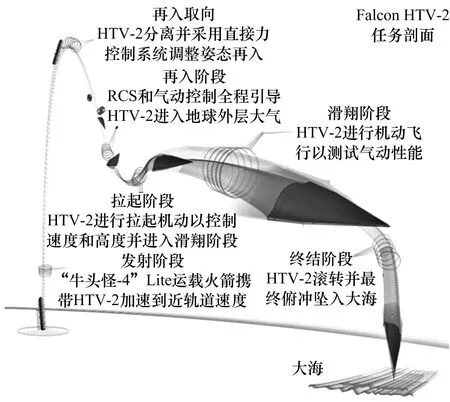
图3 HTV-2飞行试验规划的飞行剖面示意图
作为技术验证与数据收集平台,HTV-2主要针对长航时高超声速飞行所需的三大关键技术开展研究:气动特性、气动热效应以及制导、导航与控制。通过对HTV-2飞行器建模与仿真、风洞试验以及两次飞行试验获得高超声速数据,以应用于美国国防部常规快速全球打击计划之中,最终获得在2 h内到达世界上任何地方的能力。HTV-2的两次试飞尽管均失败,但却取得了不容忽视的成绩。首先,HTV-2的第一次飞行试验创造了许多“第一”:
1)使用了当时最大数量的地面、海上、空中以及太空数据收集平台,收集了独特的飞行数据,其中包括139 s的Ma数为17~20的气动数据;
2)当以5794 m/s的速度飞行时可以维持GPS信号;
3)验证了与飞行器双向通信;
4)检验了直接力控制系统(RCS)的有效使用。HTV-2第二次试飞则成功验证了能够以Ma数为20的速度稳定控制飞行长达3 min,验证了飞行器气动设计,并揭示了有关飞行器热材料特性的新的认知。
HTV-2的研究成果不仅可直接应用于助推-滑翔武器的研制,还解决了吸气式高超声速飞行器的许多关键技术,同样会极大地促进高超声速巡航导弹、高超声速飞机、空天飞行器相关项目的推进。
1.2 高超声速助推-巡航飞行器
20世纪90年代,美国军方启动全球敏捷打击计划,该计划旨在未来美国必须具备能针对各种稍纵即逝的时间关键目标(又称时敏目标),在1 h内甚至数分钟内做出反应,并用高超声速武器实施致命打击。为此,美国国防部探索和研制了各种先进的能够全球打击时敏目标的高技术武器,X-51A计划也随之应运而生[6]。X-51A临近空间高超声速飞行器的试飞成功为美军研制高超声速巡航导弹打击战区时敏目标,实施常规快速全球打击,迈出了重要的一步。
2013年5月1日,美国空军X-51A乘波者试验项目最后一次飞行试验获得突破性进展,用6 min飞越了426 km。期间搭载X-51A飞行器和固体火箭助推器的B-52H飞机升空(如图4所示),飞行员克服了最小燃油的限制,使轰炸机爬升至15.2 km,在到达香奈尔岛南侧和圣尼古拉斯岛西北侧的发射点之后,X-51A被释放,此时速度Ma数为0.8。固体火箭点火,推动长度为7.6 m的飞行器飞行了29 s,直到其到达19.2 km,Ma数为4.9。巡航段分离,滑行到Ma数4.8,超燃冲压发动机通过乙烯启动。之后发动机转换为JP-7碳氢燃料,成功突破2011年6月第二次试验时的故障点,X-51A又飞行了210 s,爬升至19.5 km,承受着0.51~0.55 MPa的持续动压,峰值加速度超过0.2 g。飞行器速度从Ma数4.8加速到Ma数5.1,还能继续加速,只不过燃料耗尽。发动机关闭后,随后在400 s左右,飞行器开始无动力滑行下降,坠落在加州西部太平洋试验场的海域中。这台无动力的飞行器进行了各种“参数验证”的机动飞行,以验证其气动操控性。X-51A试验飞行器如图5所示,包括巡航飞行器、超燃冲压发动机、连接器以及火箭助推器,整体称为飞行演示器。飞行器总长为7.62 m,最大宽度为0.58 m,发动机流动通道宽度为0.23 m,总质量为1780 kg,其中巡航器长度为4.27 m,质量为671 kg。X-51A飞行试验规划的飞行剖面如图6所示。

图4 搭载X-51A飞行器和固体火箭助推器的B-52H飞机
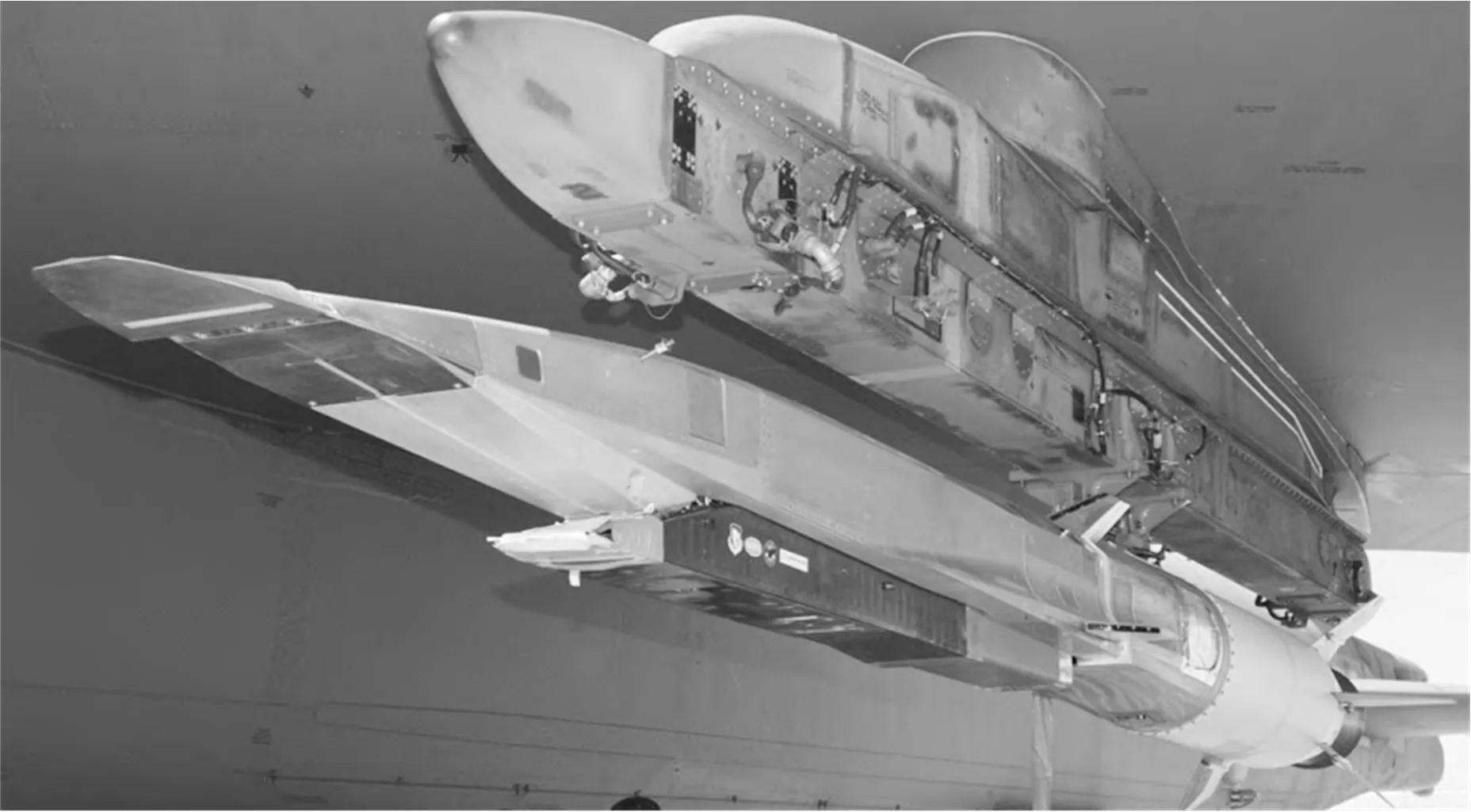
图5 X-51A飞行器
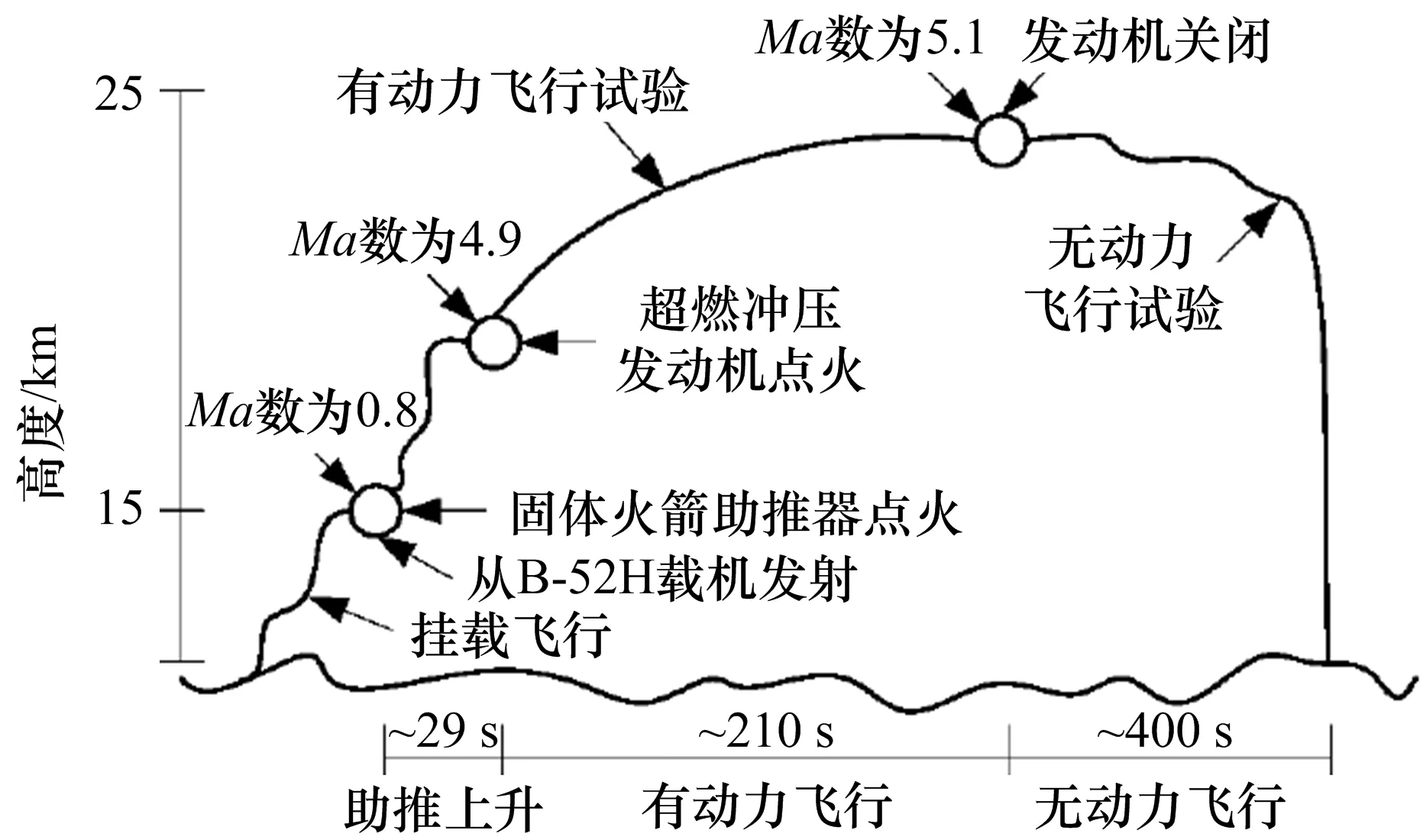
图6 X-51A飞行试验规划的飞行剖面示意图
X-51A的试飞成功将为美国空军研究实验室的高速打击武器项目(HSSW)提供助力,项目负责人布林克表示:“我们预测超燃冲压发动机技术将能够驱动类似X-51A尺寸的导弹以Ma数为5~6的速度在10~12 min之内打击270~320 km的目标。”可以预见,未来美国高超声速导弹采用超燃冲压发动机提供动力,具有发射平台多样、飞行速度快、可机动、多弹道变化选择、能够打击时敏目标和突防能力强等突出优势。它的飞行距离为1100 km以上,飞行速度Ma数可达6以上,飞行高度为20~30 km。
2 临近空间高超声速飞行器目标特性分析
2.1 弹道特性
根据第1节中分析可知,两种不同体制的临近空间高超声速飞行器,其弹道特性也略有区别:
高超声速助推-滑翔飞行器的弹道更接近于弹道导弹,主要包括:助推段、惯性段、再入拉起段、滑翔机动段和下压段。助推段:采用的是火箭助推的方式,助推高度大概为80~100 km左右。惯性段:当运载和载荷分离后,载荷在大气层外进行惯性抛物线运动,相当于弹道导弹的中段。再入拉起段:再入拉起段主要是指飞行器再入大气层后,通过姿态控制系统,在40~50 km向上拉起机动,实现到达滑翔初始点的过渡飞行。滑翔机动段:飞行器能够在20~80 km进行长时间滑翔飞行,具有一定的横向机动能力。下压段:飞行器接近目标后,在较短距离内进行急速下压,做近垂直运动。
高超声速助推-巡航飞行器的弹道更接近于巡航导弹,主要包括:助推段、巡航段、下压段。助推段:采用空基发射后利用火箭助推的方式,助推高度大概为20 km左右,助推至超燃冲压发动机启动工作所需的启动Ma数。巡航段:巡航高度一般为20~40 km,巡航Ma数为6左右,具有较强的横向机动能力。下压段:飞行器接近目标后,在较短距离内进行急速下压,做近垂直运动。
不同弹道对比如图7所示,自上向下分别为弹道导弹导弹、助推-滑翔弹道、助推-巡航弹道和巡航导弹弹道。
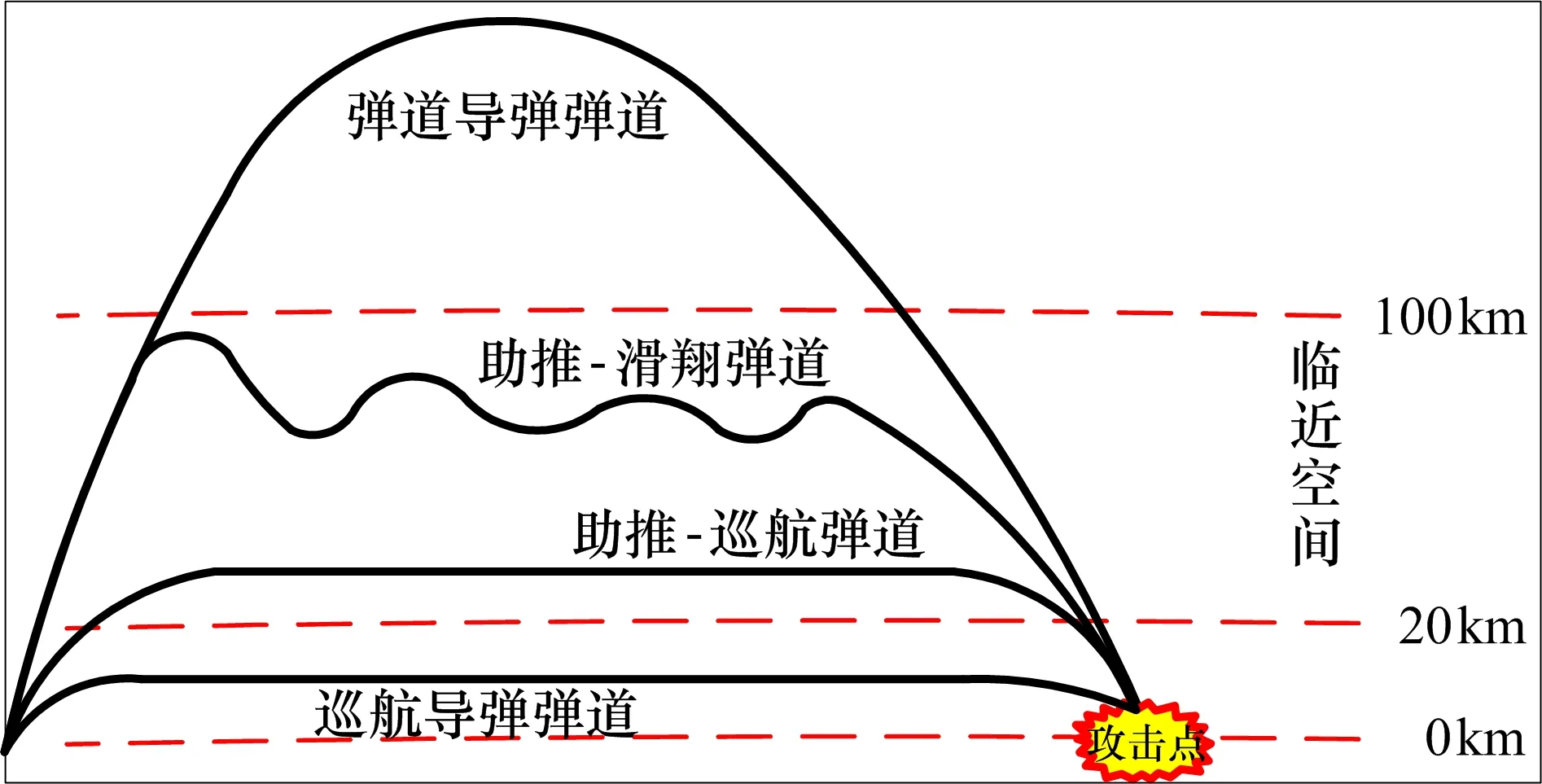
图7 不同弹道对比示意图
无论是高超声速助推-滑翔飞行器还是助推-巡航飞行器,其航迹规划和俯冲点的选择除了需要满足精确打击的作战目标要求外,还需要满足多个再入飞行轨迹约束条件,包括过载、热流率、总加热量、最大表面温度、动压、配平升阻比等约束,这些约束条件将限制高超声速飞行器的飞行高度和速度[7]。
2.2 飞行特性
高超声速飞行器具有高非线性、强耦合性、不确定性和多约束的特点[8]。
1)高非线性
高超声速飞行器飞行于临近空间环境,飞行速度和高度跨度大,大气压力和密度变化大,气动特性随飞行参数变化剧烈,舵机等执行机构存在饱和、死区等,呈高度非线性;
2)强耦合性
高超声速助推-巡航飞行器采用超燃冲压发动机为动力装置,发动机性能与飞行高度、速度、姿态等参数密切相关,同时发动机推力特性直接影响飞行状态,即动力与飞行状态间耦合严重;高超声速助推-巡航飞行器一般为细长体外形,其固有频率和结构刚度较低,易造成显著的弹性变形,影响飞行器动力学特性和发动机推力,即机体、动力、结构动态间耦合严重;两类高超声速飞行器均存在严重的气动加热现象,气动加热导致材料性能与刚度下降,影响飞行器结构模态频率和模态振型,进而通过气动伺服热弹性问题影响飞行控制,即气动热、结构动力学、控制间存在耦合。
3)不确定性
高超声速流的薄激波层、高熵层、黏性干扰、高温效应以及低密度流导致飞行器气动特性的严重不确定性;气动加热导致结构振型和固有振动频率变化,结构动力学存在不确定性;临近空间环境复杂多变,大气干扰存在不确定性。
4)多约束
高超声速飞行器由于在大气层内长时间飞行,飞行速度快,飞行器热力学环境十分恶劣,为保证飞行器热防护、飞行器机体载荷等要求,对飞行热流率、动压以及过载等约束严格;针对轨迹优化问题,高超声速飞行器往往具有航路点、禁飞区等约束;高超声速飞行器控制执行机构存在运动速率、舵面偏转范围等能力约束;高超声速飞行器对机载计算机计算量和计算速度提出了较强的约束。
2.3 雷达散射特性
典型的高超声速飞行器一般采用乘波体构型,雷达散射面积通常只有0.01~0.1 m2。高超声速飞行器在跨大气层飞行时,飞行速度Ma数达到6~20,剧烈摩擦其周围的空气并对空气产生压缩,使飞行器周围的空气温度急剧上升,致使空气发生离解和电离,从而在飞行器周围形成等离子体,又称“等离子鞘套”。这些等离子体是一种由中性粒子、离子和自由电子组成的带电气体,等离子体的形成还与飞行器的形状、速度、材料以及大气密度有关。无线电波在等离子体中传播时,自由电子和离子在电磁场的作用下往复振动,振动的电子和离子与空气中的中性粒子相碰撞,并把能量传给中性粒子,使无线电波能量损失,这种损失称为“吸收衰减”。等离子体越厚,吸收衰减就越大。此外,等离子体并不均匀,无线电波在其中传播时会产生反射,这种反射也会造成无线电波的损失,称为“反射衰减”。这些衰减将可能造成通信中断,出现“黑障”现象。“黑障”现象将严重影响目标的RCS[9]。
相关研究表明,等离子鞘套对于雷达目标探测,一般表现为目标RCS增大,特殊情况下,等离子体厚度和浓度处于某个特定值时,对于某个特定频率的雷达探测信号,等离子鞘套具有发散和吸收照射电磁信号的作用,此时目标RCS会减小,需要说明的是,这种RCS减小现象是在一些特定条件下出现的特殊现象,而很多情况下,RCS具有增大特征。有理由相信,反导雷达在跟踪滑翔变轨飞行弹道导弹方面,理论上没有不可逾越的障碍。另外,观察以往惯性弹道导弹飞行试验时,地面雷达一般均能完整跟踪导弹的再入过程,包括弹道末段的导弹俯冲过程,这说明雷达能够跟踪导弹的变轨飞行,可以推断,导弹滑翔变轨飞行对反导雷达的目标截获不会产生难以克服的困难[10]。
2.4 红外辐射特性
文献[11]计算了X-51A在临近空间以Ma数为5的速度飞行时,中波(3~5 μm)和长波(8~14 μm)波段的红外段辐射强度最大可达25595.9 W·sr-1和3935.3 W·sr-1,而传统弹道导弹[12]弹道中段目标动态红外辐射特性仿真计算中段飞行时弹头目标的红外辐射强度中波一般在几十瓦,长波一般在几百瓦。前者长波红外辐射强度是后者的十几倍,而中波辐射强度更是达到了近千倍之多。如果飞行速度继续增加,温度将继续升高,各波段辐射强度也将随之进一步上涨,辐射峰值波长将移到短波(1~3 μm)甚至可见光、紫外波段。
文献[13]构建的红外探测系统和高超声速飞行器构成的体系中,以探测器为被辐照对象,设两者之间的距离为R,导出探测距离具有如下关系:
R=(τaI)1/2((π/4)τ0Dlens/(F/#))1/2·
(D*)1/2(SNR(ΔfnΩd)1/2)-1/2
(1)
式中,τa为大气透过率,I为相应探测波段的辐射强度;τ0为光学系统透过率,Dlens为透镜直径,F/#为光学系统的F数;D*为探测率;SNR为探测系统的信噪比,Δfn为噪声等效带宽,Ωd为探测器立体角。式(1)可以分为四个部分,其中第一部分与飞行器辐射强度和大气透过率有关,后三部分取决于接收光学系统的性能,探测器性能以及探测器光敏面积和系统噪声等效带宽。假设临近空间透过率按0.7计算(大气层外为1),以上述中波辐射强度代入计算,前者可被探测距离将是后者的20多倍,如果进一步考虑探测系统自身性能升级的情况,探测距离应该能够达到几百甚至上千千米。
3 临近空间高超声速飞行器突防威胁分析
3.1 威胁1——探测系统升级
面对高超声速导弹快速发展态势,美国在导弹防御系统的升级上也是同步推进的。如开发了基于临近空间的飞艇、浮空气球、临近空间长航时无人机等新型探测平台[14-15],同时通过升级天基红外系统(SBIRS)红外传感器性能等[16],进一步增加对这类高超声速导弹的早期预警时间,此外通过地基、海基、空基、临基和天基等各预警平台的协同工作,能够对导弹进行精确定位和持续跟踪甚至指引拦截弹进行拦截[13]。文献[17]指出,浮空平台探测30 km和50 km飞行高度下的目标时,理论最大探测距离分别为1287.7 km和1468.5 km。如红外传感器灵敏度提升至10-11W·cm-2,则中波、长波波段的最大探测距离已超过浮空平台的理论最大可探测距离,即此时该浮空平台在其可探测区域内均能探测到目标。
文献[4]考虑到临近空间高超声速目标滑翔段或巡航段的红外辐射强度远高于弹道导弹的中段,如果将LEO的凝视传感器改进,以中波红外作为主要工作波段,并可下视对地观测,通过STK仿真分析,LEO对在20~100 km这部分区域活动的临近空间高超声速目标,能够完成双重覆盖。即通过对LEO凝视传感器进行改进,能够对无动力滑翔段或巡航段目标进行连续稳定跟踪,甚至指引拦截弹直接拦截。
3.2 威胁2——拦截弹升级
国外已部署的典型防御系统中,有可能用于临近空间高超声速目标防御的系统有:美国陆基的战区导弹防御系统(PAC-3/Erint)、“宙斯盾”武器系统(标准系列拦截弹)、末段高层区域防御系统(THAAD)、欧洲防空导弹武器系统和反导武器系统(Aster-30)、俄罗斯“凯旋”防空导弹系统(S-400)等,其中PAC-3和Aster-30拦截高度小于20~24 km,THAAD的拦截空域为40~150 km(注:有文献报道为30~150 km),“标准-6”的拦截空域则为70~370 km的大气层内高空到大气层外的广阔空域,中间存在20~40 km间断的空白区域,而这一区域正是目前高超声速武器快速发展的区域。
但值得注意的是,作为美国现役反导系统中,能够实现部分临近空间区域拦截的末端高空区域防御系统(简称THAAD),已经筹划改进升级,发展增程型THAAD(THAAD-ER)系统,THAAD-ER将采用两级发动机设计,助推器较原来更大,使一子级能将拦截弹助推至大气层内高空或大气层外。二子级能缩短杀伤器在释放前与目标的距离。同时通过集成更加先进的姿态控制系统、能量管理系统、红外导引系统等,进一步拓宽THAAD拦截弹的工作区域上下限,全面覆盖并提高临近空间高超声速目标的拦截能力。
文献[18]设想从临近空间飞行器平台上发射改进型红外成像空空导弹,以迎头方式攻击临近空间高超声速飞行器,并进行了系统仿真。结果表明,从临近空间平台上发射改进型红外成像空空导弹的拦截方法,对无机动高超声速目标迎头攻击距离达到500 km,脱靶量仅为0.5 m。
3.3 威胁3——传统突防措施受限
传统弹道导弹突防可使用多种手段[19],有整形隐身、调姿隐身、机动变轨飞行等,另外还使用自卫式(简称弹载突防干扰装置)进行突防。弹载突防干扰装置的作用是干扰反导雷达和拦截弹导引头对导弹的探测、识别和跟踪,使反导武器难以拦截进攻导弹。弹道导弹突防常用的突防干扰装置有:内置式雷达干扰机、伴飞式雷达干扰机、伴飞式红外诱饵、伴飞式红外雷达复合诱饵。
由于临近空间具有“大气过滤”作用,各类伴飞式突防干扰装置将无法继续使用;同时由于临近空间飞行器的“等离子鞘套”现象,内置式雷达干扰机传播电磁波受限也将无法继续使用;各类隐身涂层在高温下也将被迅速烧毁而失去隐身作用;机动变轨需要消耗大量的燃料,且飞行过程中受到气流、热防护等多约束条件限制,导致飞行器机动能力和机动次数有限,也难以起到可靠突防作用。
4 结束语
本文选取HTV-2和X-51A两种典型体制临近空间高超声速飞行器并对其技术体制进行对比,分析了不同体制临近空间高超声速飞行器在弹道特性、飞行特性、雷达散射特性和红外辐射特性等主要目标特性及其与传统弹道导弹和巡航导弹的差异,最后对临近空间高超声速飞行器当前及将来可能面临的突防威胁进行梳理与分析。研究结果表明,随着探测系统和拦截弹的升级,以及传统突防措施在临近空间使用受到限制,未来临近空间高超声速飞行器的突防威胁不容小觑。在开展临近空间高超声速飞行器研制过程中,必须同步考虑适用于临近空间高超声速飞行器的突防技术措施和突防装备。
