履带式温室智能喷药机器人的设计
2019-01-30靳文停葛宜元张闯闯岳晓娜杜爽彭正玲赵宝月张拂晓车芷君
靳文停 葛宜元 张闯闯 岳晓娜 杜爽 彭正玲 赵宝月 张拂晓 车芷君

摘 要:喷药机是民用领域必备的农业装备,各国对喷药机的研发都非常重视。智能、精准化机器能在广阔的田野上代替手工完成各种农活,世界各国农业机械都是向着全方位实现农业智能化、信息化方向发展,并努力促进高新技术的快速发展。日本、美国、西班牙等国家智能喷药机技术相对成熟,并已广泛应用于农业。我国的智能精准化喷药机研究起步较晚,技术水平与发达国家具有一定差距。利用高精度喷药技术、高精度传感器技术、机电一体化技术等相结合研发的履带式温室智能喷药系统,减轻作业人员的劳动强度、改善工作环境、施药均匀、提高药盖率、减少资源浪费,对改善环境污染等有着重要的现实意义,并且将会极大地提升作物的产量,对于国民经济的发展具有重要意义。
关键词:履带式;温室;智能;喷药机
中图分类号:S49;TP242 文献标识码:A
doi:10.14031/j.cnki.njwx.2019.01.003
0 引言
传统的喷药机效率较低,人工成本较高,人工喷药除操作人员易中毒,劳动强度大外,还存在着作物受药质量差,大型机械不适合温室作业等缺点。随着社会进步和人们对生活质量的要求不断提高,人们对食品安全关注度也不断的提高,温室智能喷药机产业潜在市场巨大,发展前景可观。20世纪80年代以来,“精准农业”技术的研究与应用在发达国家受到普遍地重视,“精准农业”己被国际农业科学界认为是21世纪实现农业可持续发展的先导性技术之一[1]。2017年,美国约翰迪尔公司以3.05亿美元收购机器人初创公司蓝河科技,将利用蓝河科技的计算机视觉精准喷洒农药机器人来实现“精准农业技术”;西班牙Almeria大学针对大棚环境研制的喷雾机,通过高压喷雾器,实现雾滴在作物冠层中的高渗透率喷雾;塞维利亚大学针对大面积草坪,通过GNSS导航的路径规划实现地面自主施药的移动平台。除此之外,德国、韩国、巴西等国家都已经将智能喷药机应用于农业植保作业[2-6]。
《中国制造2025》将农机装备列为重要领域,制定了农机装备发展行动方案。《全国农业现代化规划(2016-2020年)》对农业机械化提档升级作出全面部署。“智能农机装备”纳入了“十三五”国家重点研发计划[7]。济南大学研究了基于悬挂链输送机的大棚智能喷药机器人;青岛农业大学研究了自动识别定量喷药机器人;中国农业大学研制的电磁诱导农用喷雾机器人于2007年通过测试,进行了走直线和45°转弯两组试验,能够实现喷药的自动化和智能化;2017年德州“共享农机”新模式问世,农民扫码支付既可使用喷药机器人,该项目获得了地方农业机械部门的认可和支持[8-14]。
1 履带式温室智能喷药机器人结构及工作原理
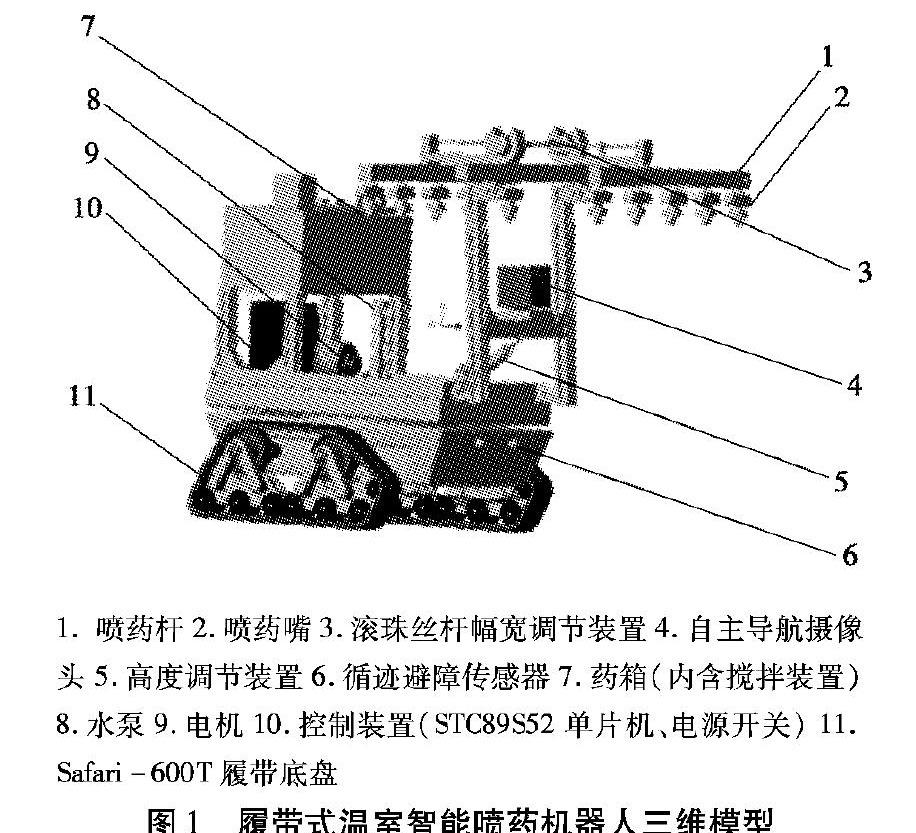
课题组研制的履带式温室智能喷药机器人由喷药系统、调节装置、履带底盘、传感器、控制系统、信息采集装置、供电模块等几大部分组成。履带底盘配合控制装置自主导航摄像头以及传感器可实现温室自动行走。自主导航摄像头配合控制装置控制滚珠丝杠左右调节装置和直线电动推杆高度调节装置,适应不同高度作物均匀施药。履带式温室智能喷药机器人的三维模型如图1所示。
履带式温室智能喷药机器人工作时自主导航摄像头可360°旋转,采集温室内作业环境以及所针对的作物情况,回馈到STC89S52单片机控制系统进行信息处理并作出指令;滚珠丝杆、直线电动推杆进行高度和幅宽调节,以适应作物能够在最佳受药距离自动停止。行走时由循迹避障传感器实时感受温室路况,回馈到单片机控制系统,对Safari-600T履带底盘进行即走即调,保证通行顺畅。为防止长时间作业药液沉淀情况发生,在药箱增加搅拌装置,根据不同药物可设置不同搅拌时间间隔。
2 履带式温室智能喷药机器人设计
2.1 软件设计
本项目采用5路BFD-1000循迹传感器,可以准确对复杂黑(白)线进行跟踪,循迹范围为0.5~40 mm。避障传感器采用E18-D80NK光电传感器模块,集发射与接收于一体。检测距离可以根据用户要求进行调整,具有测探距离远、受可见光干扰小、价格便宜、使用方便等特点。
核心控制系统采用STC89S52单片机,此单片机集以下功能于一体,具有H桥L293D电机驱动电路,PWM接口;LM324红外信号转换电路;4位数码管显示屏;光电测速信号接口;USB下载+USB转串口通信功能,能够灵活支配各部分工作。
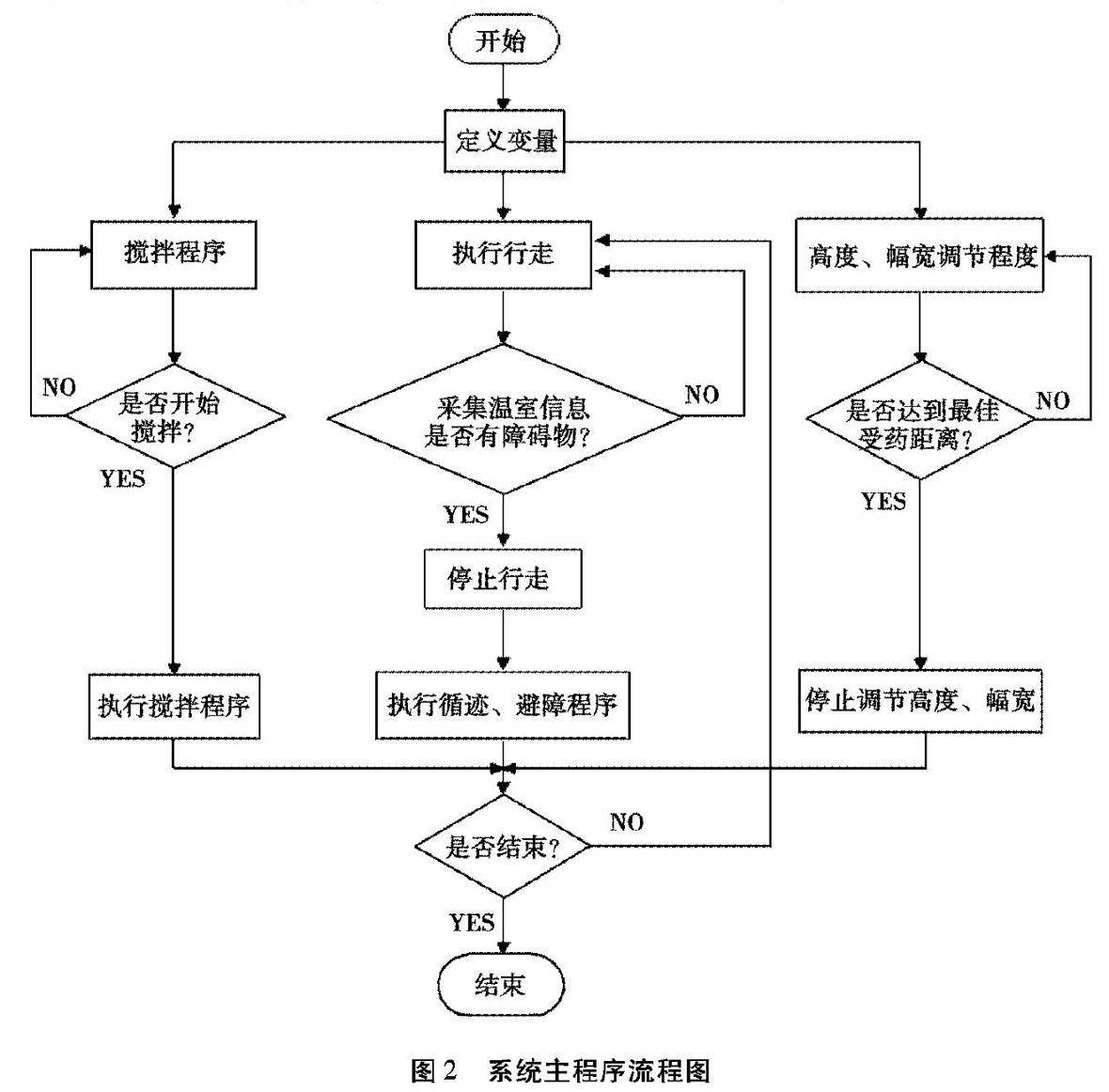
系统主程序流程如图2所示。
2.2 硬件设计
2.2.1 履带底盘设计
机器人底盘采用Safari-600T履带底盘,整体采用克里斯蒂独立悬挂设计,更好的做到重载避震。内部搭载650 W高扭矩直流无刷减速电机,为底盘提供强劲动力,可负载越障。转向半径极小,可实现原地转圈。精准的底盘高度搭配合理功率的电机,使得本机器人具有低重心,通过性强,运行平稳,适合温室复杂环境使用。
喷药机喷雾行走速度,可根据实际作业情况设定,一般喷雾速度在2.5~7.5 km/h。可參考《作业速度计算公式》制定履带机组行走速度[7]。用户可根据具体情况,通过改变行走速度、喷量大小等参数改变施药量。
作业速度计算公式为
v=kqQ·w(1)
式中 v为作业速度;k为常数系数;Q为单位面积实际施药量;q为系统施药量;w为喷药架有效距离。
2.2.2 幅宽调节机构
幅宽调节机构采用滚珠丝杆传动,推动固定在直线导轨上的滑块在正反限位开关内前后移动。滚珠丝杆具有定位精度高、摩擦力小、刚性高、负载能力强的特点,可实现精准定位。本机器人在喷药架上安装左右旋向相反的两个滚珠丝杠导轨作为辅助装置,工作时农户可根据自家作物垄宽自行设置,或由机器人控制系统自行调节。此装置可避免药杆过长造成的药物浪费现象,节约成本。幅宽调节机构如图3所示。
压杆失稳临界载荷计算公式为:
Fk=fkπ2EIKa2
式中 FK为压杆失稳临界载荷;fk为压杆稳定支撑系数,取1.0;E为钢的弹性模量取2.1×105 MPa;I为滚珠丝杠底径的抗弯截面惯性矩,I=πD464;K为压杆稳定安全系数;a为左右支撑中心距。
根据公式,计算出丝杠工作载荷为138 N,额定动载荷为1960 N;精度等级为5级。压杆失稳临界载荷为41609.09 N,远大于工作载荷,满足要求。
2.2.3 高度调节机构
高度调节机构采用直线电动推杆,体积小、精度高、自锁性能好。
本机器人安装直线电动推杆辅助装置,通过单片机控制,以此对喷药有效高度进行调整(推杆行程可定制),减小施药有效距离。推杆两头各有一个行程限位开关,推杆一端通过支架与底盘相连,另一端通过活动支架与喷药支架相连,伸缩杆运行到底或到顶后,会自动停止,电机不会空转烧机。推杆通过直流电机驱动实现螺杆传动,伸缩杆只能伸缩不会旋转。电机是正负两极,比如正极伸,负极缩,相反就可以改变杆伸缩方向。高度调节机构如图4所示。
在直线电动推杆驱动喷药架时,喷药架要实现主动自适应,要对直线电动推杆中无刷直流电机进行转矩的控制。
2.2.4 自主导航摄像头
自主导航摄像头由光线传感器、镜头、SD储存卡、重置按钮、三轴底座等组成。三轴底座设计不仅可以调整高度、任意旋转,还能调整拍摄俯仰角度;F2.0大光圈镜头搭配IR-CUT自动双滤镜,最大可视距离可达9 m,温室内作业环境以及作物上的病虫害可观察得一清二楚。自主导航摄像头将采集图像信息,通过内部转换电路转换成视频信号输出至调制电路,调频后得到射频信号,送入放大器可放大后送出,无线接收模块接收解调后将信息传递至STC89S52单片机,单片机控制执行元件进行工作。信号转换如图5所示。视频信息也可录制储存下来,便于机器人正常行走以及农户及时掌握温室内作物病虫害信息。
2.2.5 定时微型防腐蚀桨叶搅拌器
定时微型防腐蚀桨叶搅拌器区别于传统搅拌器,可定时工作、结构紧凑、性能稳定、能耗小。搅拌器主要由定时器、电机、减速机、联轴器、搅拌轴、搅拌桨叶组成。电机、定时器位于药箱顶部,搅拌轴通过药箱上提前打好的孔通入药箱内部,搅拌轴与一种带有多片交互式搅拌叶的搅拌桨,搅拌桨可直接置于药箱中进行高速旋转,从而实现了三维高速立体搅拌,用户可根据不同药液设置相应时间间隔进行搅拌。
3 结论
履带式温室智能喷药机器人的设计以STC89S52单片机为核心,利用Safari-600T履带底盘、自主导航摄像头、五路循迹传感器、光电传感器、避障传感器、滚珠丝杆导轨、直线电动推杆、定时微型防腐蚀桨叶搅拌机等相结合,实现了温室内作物的喷药作业。
(1)采用Safari-600T履带底盘,解决了轮式移动装置支撑面积小、接地比压大、下陷度大、滚动阻力大的问题。
(2)采用滚珠丝杆导轨、直线电动推杆等装置进行幅宽、高度调节,减小有效距离,提高药盖率。
(3)采用定时微型防腐蚀桨叶搅拌机,防止长时间作业药箱中药液沉淀现象的发生,提高药液均匀性。
参考文献:
[1] 胡彦福. 基于超声波传感器的轮式喷药机器人移动控制系统研究[D]. 重庆:西南大学,2009.
[2] 新浪财经. 约翰迪尔欲收购喷药机器人公司实现“精准农业技术”[OL]. http://info.cm.hc360.com/2017/09/111129684026.shtml, 2017-9-11.
[3] 王佳文,杨自栋.自动调平喷杆式喷药机设计与试验研究[J].农机化研究,2016,38(7):162.
[4] PANOPOULOS PETER J (US). Machine that is an automatic pesticide, insecticide, repellant, poison, air freshener, disinfectant or other type of spray deliv:US,2005224596[P]. 2005-10-13.
[5] Cheslav Zhdanovich,Michail Mamonov, Maciej Kuboń,Jan Rados aw Kamiński. Effect of Steering Gear Parameters of Crawler Tractor Cornering Ability[J]. Agricultural Engineering, 2016, 20(2).
[6] Jaros aw Kończak. Reliability analysis of high-speedtracked vehicles in the polish army[J]. Journal of KONBiN,2017,42(1).
[7] 中国机械工业联合会机经网. 农机化司司长李伟国解读《全国农机化发展第十三个五年规划》[OL]. http://feature.mei.net.cn/news.asp?keyword=729268, 2017-04-26.
[8] 青岛新闻. 给农作物喷药交给机器人吧[OL]. http://epaper.qingdaonews.com/html/qdzb/20131112/qdzb648220.html, 2013-11-12.
[9] 杨世胜,张宾,于曙风. 电磁诱导农用噴雾机器人路径导航系统的设计与实现机器人[J]. 机器人, 2007(1): 79.
[10] 大众网. 德州现“共享农机”农民扫码支付可用喷药机器人[OL]. http://dezhou.dzwww.com/yc/201708/t20170814_16119376.html, 2017-08-14.
[11] 朱光强. 智能喷洒机器人系统设计[D]. 佳木斯:佳木斯大学, 2017.
[12] 周天文, 崔允浩, 周兴宇, 等. 履带式混合动力喷药机驱动系统的设计[J]. 机械制造, 2017, 55(5):13.
[13] 吴金竹. 无线摄像监控系统电源设计[D]. 合肥:合肥工业大学, 2015.
[14] 陈春华, 章军, 田志伟, 等. 电动推杆驱动串联双铰链柔性机械手的状态分析[J]. 机械制造, 2015, 53(2):31.