基于腕部可穿戴设备的跌倒监护系统设计与实现
2019-01-30,,,
,,,
(广州大学华软软件学院 电子系, 广州 510990)
0 引言
对于身体羸弱的老年人来说,跌倒是第二大意外伤害死亡的直接或间接原因,特别是随着社会人口老龄化的加快,社会劳动力缺乏,老人或病人医疗看护成本急剧上升,再加上人均寿命提升,长期亚健康生活状态下各种慢性病的流行,导致这个社会问题越发突出[1-2]。近年来,随着新型传感器、服务机器人、物联网等技术的快速发展,以及《“健康中国2030”规划纲要》等有关国民健康的战略发展规划的提出,国内外越来越多的科研人员开始积极寻求各种解决方案,利用智能检测技术实现对老人或病人的跌倒看护是当前该领域的研究热点[3-5]。
根据跌倒事件的原理,目前国内外用于跌倒检测的技术主要有以下几种:①基于动态图像处理技术[6],该技术主要通过摄像机对被监护者连续监视,并利用动态图像处理技术分析被监护者身体头部、肩部等关键部位的突发性变化轨迹,实现对跌倒事件的判断,这种方法一般只适用于固定区域的监控,监控设备安装成本高,监控性能的对可见光依赖度很高,而且容易泄露被监护人的隐私。②基于Kinect骨架追踪技术[7-9],该技术通过Kinect设备自带的红外传感器和配套的算法检测包含人体头部和四肢在内的20个骨架节点位置变化,将骨架节点位置变化的信息流作为跌倒检测的主要依据,该方法不依赖于可见光,不会泄露被监护人隐私,但还是存在设备成本高昂,人体不能被遮挡,监护区域固定等缺点。③基于可穿戴式设备[10-14],这也是目前研究的热点,该方法主要通过在身体躯干部位佩戴三轴加速度传感器和陀螺仪等传感器,采集人体各种状态下的躯干加速度值和姿态角,并结合随机森林[15]、支持向量机[16]、神经网络[17]等各种算法来判断跌倒事件的发生,这种方法成本低廉、没有监测区域限制,但检测设备需佩戴在身体主躯干上,舒适性不足,妨碍正常运动,而且在病理性晕倒、或者快速坐下、跳跃等稍剧烈的日常动作时普遍误报警率较高。
针对以上问题,本文结合智能穿戴技术设计了一个基于智能手表的跌倒监护系统,该系统利用三轴加速度传感器、三轴陀螺仪、绝对气压传感器、心率传感器等检测被监护人腕部位姿和人体生理信号进行综合判断,再利用BLE将通过手机上传至云服务器,同时利用GSM向监护人进行远程跌倒报警求救,最后通过实验证明了该腕部监护系统在不影响用户舒适度的前提下可以有效进行跌倒监测并报警。
1 基于腕部可穿戴智能设备的跌倒监护系统简介
为了解决当前基于躯干可穿戴跌倒检测设备的舒适性不足及报警准确率不高的问题,本文设计了一款基于腕部穿戴的智能跌倒监护设备,本腕部智能穿戴设备能够借助检测子系统中的绝对气压计、六轴陀螺仪,对人体手腕所处的绝对气压(可转换为海拔高度)和xyz三个轴向的加速度、角速度(包括俯仰角、偏航角和滚转角)等位姿信息进行采集,并结合检测子系统中的心率血氧传感器所采集到的心率血氧饱和度等参数进行数据融合处理,根据融合结果和告警阈值分析评估用户的是否跌倒以及身体是否存在生命危险,智能设备在评估认为用户存在生命危险(如因跌倒、晕倒无法爬起和心率体温严重失常等情况)时会启动预警机制,并且通过GPS定位,通过GSM向监护人进行报警与发送求救信号;同时远程监控子系统中的手机客户端统可将智能手表中的各种传感器原始数据和融合后的结果上传至服务器端进行记录保存,用户(佩戴者)和监护人员可以随时随地通过手机客户端查看并分析用户(佩戴者)历史数据信息。整个系统结构如图1所示。

图1 基于腕部穿戴智能手表的跌倒监护系统
2 硬件选型和电路设计
本项目组设计的基于智能手表的跌倒监护系统由手表子系统、检测子系统和远程监控子系统组成,整个智能手表除了核心硬件模块外,还包括由SSD1306驱动的OLED屏、振动马达(GPIO)、虚拟按键(GPIO)和GSM模块SIM900A,因篇幅所限,本文仅针对跌倒检测功能的核心模块进行介绍。
由于腕部智能穿戴设备对电池续航时间功耗、空间体积有严格要求,因此,在能满足功能需求的前提下,硬件选型主要从功耗和芯片体积方面进行权衡。
2.1 微控制器DA14580
本系统选用了号称全球功率最低、体积最小的SmartBond DA14580蓝牙智能系统级芯片,该芯片采用晶圆级晶片尺寸包装,尺寸仅为2.5×2.5×0.5 mm;其集成的低功耗蓝牙收发电流仅消耗3.8 mA,且它在深度睡眠模式下电流低于600 nA,功耗比市场上其它蓝牙智能解决方案低50%以上。且该芯片集成度极高,内嵌一块32位ARM Cortex M0TM处理器、记忆体和丰富的外设,能以低成本开发出高功能的系统。
2.2 气压检测模块MS5611
本文以成年人跌倒事件为研究对象,当我们突然跌倒时,腕部海拔高度必定会突发性降低1 m以上,因此高度变化成为本系统跌倒判定的重要指标。为检测出腕部的高度相对变化,选用了瑞士MEAS公司的MS5611高分辨率气压传感器对大气压强进行检测,再将大气压强转换为海拔高度,MS5611传感器模块包括一个高线性度的压力传感器和一个超低功耗的24位∑模数转换器(工厂校准系数),该传感器可检测的气压范围为1~120 kPa,测量精度可达到±0.1 m,完全能满足本系统对高度的需求。该芯片尺寸仅为5.0×3.0×1.0 mm,平均功耗低达1 μA,芯片主要定位在智能手表、手持设备和飞行器等产品市场,可采用SPI或I2C与MCU进行连接。
2.3 心率血氧检测模块MAX30102
心率和血氧饱和度是人体生理信号中非常重要的体征指标,本系统选用的MAX30102是一个集成的脉搏血氧仪和心率监测仪生物传感器的模块,它集成了一个红光LED和一个红外光LED、光电检测器、光器件,以及带环境光抑制的低噪声电子电路。MAX30102采用一个1.8 V电源和一个独立的5.0 V作为内部LED的电源,可应用于可穿戴设备进行心率和血氧采集检测,佩戴于手指、耳垂和手腕等处,使用标准的I2C兼容的通信接口与各种微控制器进行连接,芯片尺寸为1.8×1.5×0.25 cm。
2.4 加速度合角速度检测模块
本系统选用美国InvenSence公司的MPU6050作为手腕加速度合角速度检测装置,该模块是全球首例9轴运动处理传感器,内部集成了3轴MEMS陀螺仪和3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,带有可编程的低通滤波器,并分别使用了3个16位的ADC将陀螺仪和加速度计测量的模拟量转化为可输出的数字量。片上集成一个1024字节的FIFO,和所有设备寄存器之间的通信采用400 kHz的I2C接口,芯片尺寸为4.0×4.0×0.9 mm,最大工作电流3.9 mA。
2.5 智能手表硬件结构图
本文设计的基于智能手表硬件结构图如图2所示。

图2 智能手表硬件结构图
3 系统软件设计
3.1 数据采集
人体行为状态的定义非常复杂[18],为方便智能手表对用户的跌倒行为检测,本文把人体人体复杂的动作分为跌倒动作、类跌倒动作和日常动作,其中跌倒动作包括前向跌倒、仰面跌倒、侧向跌倒和病理性跌倒,类跌倒动作又包括跳跃动作、剧烈甩手动作等,剩下的步行、坐下、站立等动作均归类为日常动作。为了实现智能手表对这三类动作的准确区分,首先需要分析用户产生这三类动作时的加速度、角速度和腕部高度变化情况,找出其关键特征,并归纳整理其规律供智能手表在跌倒判定时使用。
本文所用分析数据均由5名学生实验者采集所得,通过佩戴本文设计的智能手表,并模拟各类跌倒和坐立起行等日常动作,智能手表自动将采集的数据通过蓝牙上传到安装有配套app手机存储卡中。在跌倒试验中,由于地上铺的双层瑜伽垫具有缓冲作用,导致跌倒之后双手触底瞬间的加速度比实际跌倒时要略小。另外,本文将晕厥等病理性原因导致用户跌倒的行为均归类为病理性跌倒,该类测试数据由于没有合适的实验者,因而在本文分析过程中并未涉及。
本文以ax、ay、az分别表示智能手表通过MPU6050测得的x轴、y轴、z轴的加速度,wx、wy、wz分别表示智能手表通过MPU6050测得的x轴、y轴、z轴的角速度,合加速度a和合角速度w分别由公式(1)和公式(2)求得,本文所用手腕高度采用相对高度,由公式(3)所得的当前绝对高度减去用户初始海拔高度算出。
(1)
(2)
(3)
其中公式(3)中R为常数8.51,t为所测地摄氏温度,g为重力加速度取9.8,M为空气相对分子质量取29,P0为标准大气压取101.325 kPa,P为测得大气压强。
3.2 跌倒检测思路分析
单次跌倒到爬起时传感器测得的加速度、角速度和手腕高度变化数据如图3和图4所示,由图3可以看出,在下跌过程中xyz三轴加速度和xyz三轴角速度均存在波峰值或波谷值,无法直接用作跌倒判定,而合加速度值a和合角速度w均存在明显的波峰,合加速度峰值点出现在19样本点,合角速度峰值点出现在18样本点,且合加速度a在跌倒时波峰值高达2.03 g,合角速度w高达364.8 rad/s。同时,由图4可以看出,跌倒过程中手腕相对高度由样本0处的0 m上升到样本8处的0.12 m,再下落到样本34处的-0.68 m,较真实的还原了人体摔倒时,从跌倒开始瞬间抬手保持平衡直至再度失去平衡摔倒落地用手撑地的过程,摔倒开始到落地过程中最大高度差为Δh=0.12 m-(-0.68 m)=0.8 m。从以上分析可以暂且认为:跌倒时合加速度a合角速度w出现远大于平常的峰值时很可能佩戴者开始跌倒,若之后出现手腕高度高度大幅下降则可认为跌倒事件的发生。

图3 跌倒到爬起过程中的加速度、角速度变化情况
为了验证上述规律,提取对跌倒动作区分度高的行为特征,即合适的合加速度、合角速度峰值和高度落差作为判定依据,进一步了采集各种跌倒动作和日常动作的数据,对应的合加速度、合角速度、高度变化情况如图5、图6所示。

图6 步行、坐下和站立时合加速度、合角速度、手腕高度的变化
从图5和图6可以看出,在每次跌倒过程中会出现一个合加速度峰值和一个合角速度峰值,并且合加速度峰值在1.9~2.2 g范围内,合角速度峰值范围在180~370 rad/s,随后会出现一个较大幅度的高度下降,降幅在0.67~0.91 m之间。步行过程中所测参数波动明显减小,合加速度变化范围为0.75~1.47 g,合角速度变化范围为20.97~231.3 rad/s,高度波动范围为0~0.29 m,站立或坐着时所测数据波动则趋于静止,在作出站起或坐下等动作时波动稍有变化,但比步行时要更平缓。因篇幅大小限制,将常见动作下的合加速度峰值、合角速度峰值、高度降幅数值等关键数据列于表1。
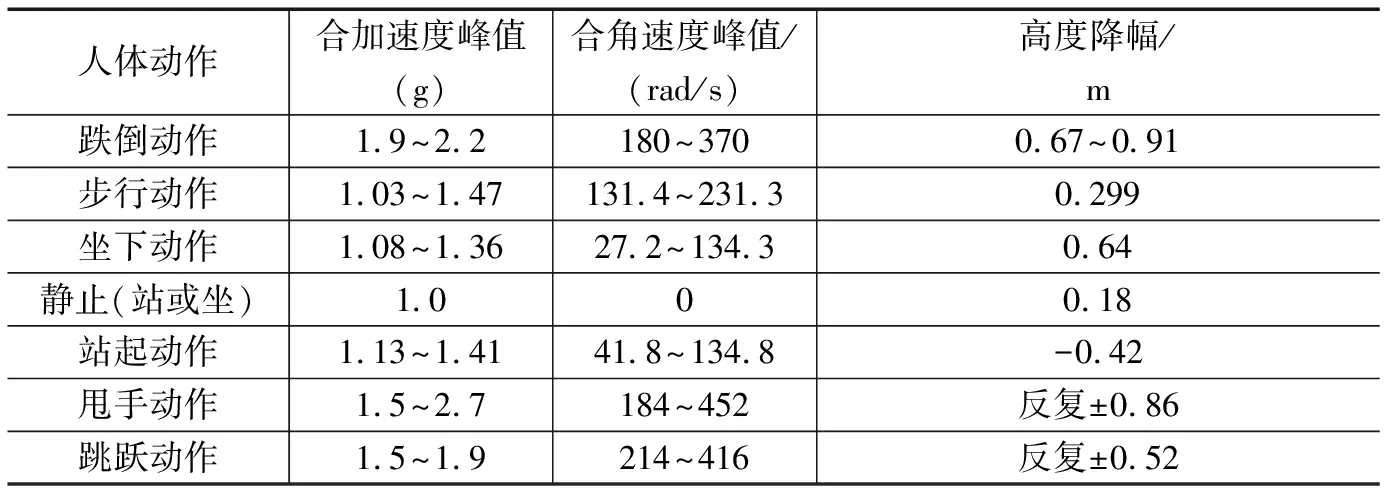
表1 各种动作数据特征统计
从表1可以看出,跌倒动作的合角速度峰值范围和步行动作合角速度的最大峰值范围部分重合,而跌倒过程中的合加速度峰值范围明显要高于其它常规动作,和跳跃或甩手时持平。因此,本文选择1.8 g的合加速度、高度降幅0.6 m作为跌倒检测阈值,前者可以过滤掉步行、跌倒、起立、坐下等动作,后者可以将跌倒动作与坐下、卧倒等动作区分开来,同时在甩手或跳跃动作过程中,腕部高度通常是短时间内连续多次上下震荡,明显区别于跌倒时直接下降的过程。
3.3 软件设计流程图
amax为过去T时间跨度范围内合加速度峰值,△h为过去T时间跨度范围内高度落差,△h为负值表示上升,正值表示下降,本文设计的基于腕部穿戴设备的位姿和生理信号的跌倒检测系统工作流程图如图7所示。

图7 基于智能手表的跌倒监测系统工作流程图
4 实验及结果分析
4.1 性能评价指标
为验证本文设计的基于腕部穿戴设备的跌倒检测系统的有效性,本文将实验结果分为表2所示的四类。

表2 跌倒检测系统的判定结果分类
基于以上判定结果类型,本文用行为检出率Pd、跌倒行为漏检率Pm、日常行为误检率Pe三个指标评测系统跌倒检测的有效性,对应定义如以下公式所示。
(4)
(5)
(6)
4.2 实验结果及分析
有效性测试由5名学生分别佩戴手表模拟完成,测试次数统计标准为:跌倒动作以模拟完整跌倒过程算1次,报警一次则漏检次数FN加1;日常行为以每3秒为一周期算1次,报警一次则误判次数FP加1。对每个行为分别测试50次,测试结果统计如表3所示。

表3 跌倒行为测试结果统计

表4 日常行为测试结果统计

表5 跌倒行为和日常行为性能指标
从以上结果可以看出,跌倒检测系统对各种跌倒动作判定准确率较高,基本上可以检测出各种非病理性跌倒。在常见的日常行为判定中,系统对步行、站起、跑步动作基本实现零误判,但系统对躺下、甩手和体操动作还存在少许误判,结合实验动作分析其原因为:躺下动作手腕高度落差接近跟跌倒相仿,在以较快的加速度躺下时加速度及高度变化特征跟跌倒时接近,容易发生误报警;在日常甩手和体操动作中若出现持续时间0.5秒以上的举手再以较大加速度下摆动作时,也会导致系统误判,跌倒判定算法还可以进一步改善,当然,系统以98.5%的总行为检出率、2.5%的跌倒行为漏检率和3.33%的日常行为误检率,辅以合适的硬件装置和软件算法也已基本可以应用于远程跌倒监护产品。
5 结语
本文当前针对目前各种跌倒监测装置的不足,设计并实现了一种基于腕部智能穿戴设备的体征采集、跌倒监测和远程报警系统,实验结果表明,在不影响用户舒适度的前提下,本系统对跌倒行为和日常行为判定准确率可以达到98.5%,说明了该腕部穿戴设备对跌倒监护的有效性。当然,系统也还有一些需要改善的地方,比如一些跟跌倒行为特征较接近的日常行为存在少许误判,一些跟跌倒行为特征较接近的的日常行为在本文也未一一涉及,另外因测试者限制,因疾病跌倒实验不好模拟,病理性跌倒检测功能还需进一步完善。
