商场智能服务机器人的设计
2019-01-30李猛郑召斌田立国王岳松
文/李猛 郑召斌 田立国 王岳松
1 引言
服务机器人作为一种半自主或全自主工作的机器人,能够完成有益于人类的服务工作,如搬运、清洁、救援等。随着智能服务机器人逐渐走进人们的社会生活领域,它将对提高人类生活质量和服务行业带来深刻的影响。
本文在对国内外服务机器人发展状况和技术研究的基础上,选择应用于商场内的智能导航服务机器人为研究对象,设计了一种集感知、导航、人机交互、饮料瓶回收等功能于一体的商场智能服务机器人。
2 系统总体设计
智能服务机器人的总体设计包含机械系统与控制系统设计两大部分:机械系统的设计主要完成机器人的移动底盘、机械手等结构;控制系统则实现对机器人的功能控制,如完成行走、避障、导航、交互等功能,控制系统又分为硬件系统和软件系统两部分。系统总体设计框图如图1所示。
3 机械结构设计
根据机器人的运动功能要求和工作环境,设计机器人的机械结构包括以下功能:
(1)机器人底盘能实现前进、后退和灵活转向的运动功能,具备自定位和自主移动能力;移动速度能在0.1-0.5m/s内;
(2)机器人的手臂可以完成招手,引导和饮料瓶回收等基本动作;
(3)机器人头部能实现左右摆头(转动)和上下点头的工作;
(4)机器人外形完美,亲和力强,身高1.2M左右,体重在30-40公斤内,且能保证人机交互过程的安全性。
4 控制系统设计
机器人整个控制系统由STM32控制器和PC工控机两部分组成,两个系统之间通过HTTP-POST进行通讯:其中下位机部分以STM32控制器为中心,搭载自主导航定位模块和各类传感器,接收上位机发出的各类指令控制机器人的行走、避障等;上位机部分则以工控机为中心,运行机器人应用程序,对下位机发出控制指令,实现定位导航、人机交互灯功能,系统原理图如图2所示。
4.1 硬件设计
4.1.1 处理器控制模块
处理器模块是整个控制系统的核心模块,其性能好坏直接决定整个系统的运行效果。本文中的下位机控制器选择高性能的STM32微处理器,其具有丰富的I/O口外设,多个通信接口,支持多种中断,满足了该机器人系统的需要。
4.1.2 电机驱动模块
电机驱动模块采用L298P双路2A直流电机驱动,用于驱动商场智能服务机器人的2个直流电机,实现机器人的移动控制。
4.1.3 定位导航模块
定位导航模块采用思岚模块化自主定位导航解决方案,由高性能激光雷达RPLIDAR A2和定位导航控制核心SLANWARE Core组成,可使机器人实现自主定位、自动建图、路径规划和自动避障,实现了机器人在商场内的自主行走。
4.2 软件设计
商场智能服务机器人系统的软件平台设计包括下位机控制程序和上位机应用程序两大部分:
下位机控制程序主要实现机器人的行走、避障、传感器数据采集以及与上位机的通信功能,属于商场智能服务机器人的底层控制。
上位机应用程序则通过对激光数据的处理建立商场环境的地图,实现智能服务机器人的定位导航功能;同时采用语音识别、图像处理技术更好的实现了用户与机器人之间的交互。
上位机应用程序采用面向对象的C++编程语言,基于Visual Studio 2010开发环境进行开发,控制系统软件则采用嵌入式uc/OS-II操作系统来实现,两者之间采用基于TCP/IP协议进行通信。
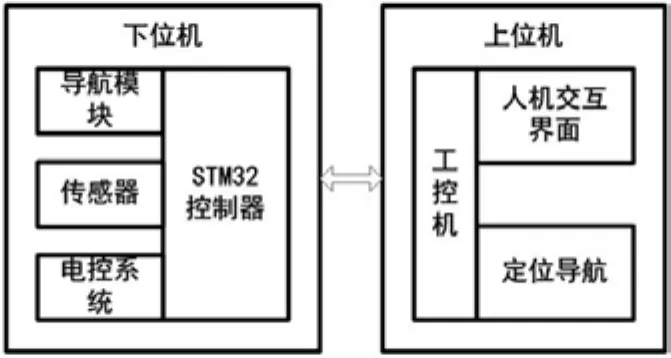
图2:系统原理图
5 结论
随着科技与服务机器人技术的不断发展,服务机器人也越来越受到人们的关注,生活中的多个领域已广泛应用到各种服务机器人。本文研究的商场智能服务机器人,定位于商场内的定位导航、语音交互等功能,具有广阔的应用开发与市场前景。
