可伸缩高空作业机械臂及其控制系统的设计
2019-01-30刘一澎
文/刘一澎
1 引言
随着科技的发展,越来越多的领域需要进行高空作业,依赖于高空作业机械臂来完成的任务也越来越多。以往,在将关节和长度固定的臂组合而对人类的手臂进行仿真时,针对不同的任务需求,会设计出不同的长度的机械臂。在高空作业机械臂的设计完成时,机械臂的工作能力及其能够工作的空间范围也就已经确定了。高空作业机械臂无法有效地扩展其能够执行的任务范围,从而应用领域被极大程度地制约。
本文提出一种可伸缩高空作业机械臂,其能够适应不同类型的高空任务,协助、代替高空作业人员工作,降低高空作业人员发生危险的可能性。并且,在对整条机械臂进行构型时,合理考虑构成机械臂的各个臂所要发挥的功能。以下,将对高空作业机械臂及其控制系统的设计进行介绍。
2 高空作业机械臂总述
2.1 高空作业机械臂的功能概述
高空作业机械臂的主要功能包括如下方面:
(1)机械臂整体为5自由度,即,旋转台具有1回转自由度,肩部具有1回转自由度,轴部具有1回转自由度,长臂和短臂分别具有1伸缩自由度。
(2)机械臂能够进行可靠且可重复的伸展与收缩运动。
(3)长臂和短臂各自的内外筒直径相差尽量小,整体刚度大,以能够承受作业过程中的冲击。
2.2 高空作业机械臂的结构
高空作业机械臂如图1所示。具体而言,高空作业机械臂包括:旋转台1,其可自由旋转;肩部2,其装设于旋转台1上,能够绕与旋转台1平行的第1轴线CL1旋转;长臂3,其一端安装于肩部2,能够沿长臂3的长度方向伸缩;肘部4,其设于长臂3的另一端,能够绕与第1轴线CL1平行的第2轴线CL2旋转;短臂5,其一端安装于肘部4,能够沿短臂5的长度方向伸缩;以及腕部6,其设于短臂5的另一端。任务操作部安装于腕部6,用于执行高空作业任务,其可根据高空作业机械臂所要执行的任务而安装不同的工具。
长臂3能够沿长臂3的长度方向伸缩,并且能够多级伸缩,在高空作业机械臂的工作中用于解决工作距离问题。短臂5能够沿短臂5的长度方向伸缩,并且能够两级伸缩,在高空作业机械臂的工作中用于执行精细化操作。
由于长臂3的作用在于确定高空作业的高度,因此长臂3并不需要较高的定位精度。另一方面,由于短臂5主要进行精细化作业,因此对精度要求较高。为了对构成机械臂的各个臂进行合理构型,长臂3采用直线驱动机构加上多级滑轮-排绳的方案,短臂5采用电机驱动滚珠丝杠组传动的方案,其具有传动效率高、构造简单、质量轻这样的优点。
2.3 高空作业机械臂的短臂的结构
由于短臂对精度要求较高,以下对短臂的结构进行详细的说明。
短臂5包括直流马达51、滚珠丝杠52以及丝杠螺母53。直流马达51布置于第1筒56,通过联轴器连接驱动轴,再经由安装于驱动轴的主动齿轮54和从动齿轮55连接于滚珠丝杠52,其中,从动齿轮55与主动齿轮54啮合。第2筒57以能够相对滑动而不能相对转动的方式配置于第1筒56。丝杠螺母53与第2筒57固定连接。从直流马达51以齿轮传动的方式将动力传递至滚珠丝杠52,滚珠丝杠52相对于丝杠螺母53旋转,从而短臂5进行伸缩运动。
3 高空作业机械臂控制系统的构成和控制流程
以下将对控制系统的构成和控制流程进行介绍。
3.1 控制系统的构成
高空作业机械臂的驱动和控制系统主要包括电源、上位机、主控制器、CAN总线通信模块、回转驱动电机和伸缩驱动电机及其对应的电机驱动器这六大部分。驱动和控制系统的构成如图3所示。
电源包含用于将220V交流电转换为24V/5V直流电的AC-DC模块,以满足主控制器、电机驱动器、回转驱动电机以及伸缩驱动电机等的供电要求。AC-DC模块的输出电压精度为±1%,并具有过流保护。
主控制器包括串口传输模块、CAN传输模块以及主芯片。主控制器通过CAN总线与电机驱动器相连,各驱动器分别与回转驱动电机、伸缩驱动电机相连,串口传输模块用于收发数据,CAN传输模块用于与电机驱动器实现通信,主芯片实现控制逻辑与功能。

图3:驱动与控制系统构成
系统控制指令由上位机通过串口传输方式发送给主控制器,主控制器解算控制指令并经由CAN总线使电机驱动器控制回转驱动电机和伸缩驱动电机转动。主控制器将当前电机驱动器速度、电流数据等通过串口传输方式反馈给上位机,发挥远程监测的功能。主控制器通过CAN总线对回转驱动电机和伸缩驱动电机分别进行控制。电机编码器的输出信号分别反馈给与回转驱动电机和伸缩驱动电机相对应的电机驱动器,构成速度闭环控制。
3.2 控制系统的控制流程
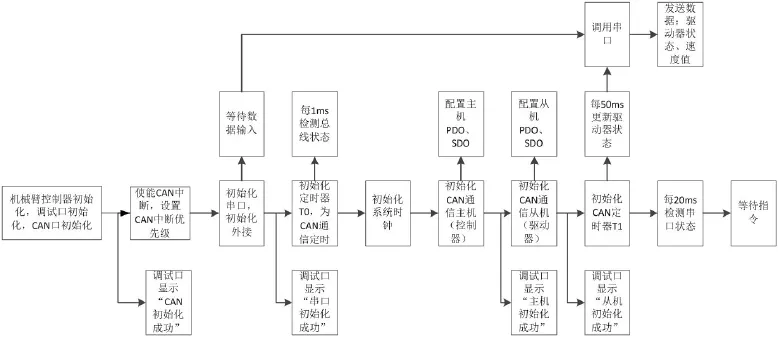
图4:高空作业机械臂的控制系统的控制流程

图5:机械臂工作流程图

图6:LPC1788最小系统
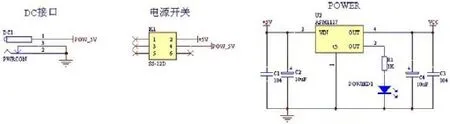
图7:电源电路原理图
在高空作业机械臂的控制系统中,控制信号由上位机通过串口发送给高空作业机械臂的主控制器,主控制器经由CAN总线向各关节的电机驱动器发送控制指令,从而电机驱动器驱动各电机进行转动。具体而言,首先进行机械臂控制器初始化;然后对CAN口初始化,使能CAN中断并设置CAN中断优先级;然后初始化串口,初始化外接,初始化系统时钟;然后初始化CAN通信主机(控制器),初始化CAN通信从机(驱动器),初始化CAN定时器。之后,每隔20ms检测串口状态,等待来自串口的指令,并且,每隔50ms更新驱动器状态,发送驱动器状态以及速度值等信息。控制流程如图4所示。
3.3 高空作业机械臂的控制系统的控制方式
利用高空作业机械臂的控制系统,能够控制机械臂执行各种作业。控制系统所执行的控制的流程图如图5。
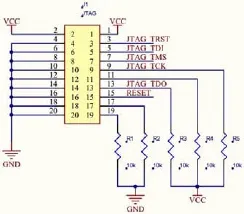
图8:JTAG原理图
具体而言,首先,根据实际情况确定作业目标相对于高空作业装置的位置关系。然后,控制系统对旋转台的朝向进行调整,使得高空作业机械臂朝向作业目标,并对肩部的角度进行控制,使长臂相对于旋转台的夹角处于初始角度。然后,调整长臂的长度从而调整长臂的末端的高度,例如使肘部相对于作业目标处于同一或大致同一高度。判断作业目标是否处于短臂的工作范围内,并修正肩部的角度。
在确定了长臂的姿态之后,对短臂的长度进行调整,从而使得作业目标处于任务操作部的工作范围内。对肘部的角度进行修正,从而执行作业过程。
4 主控制器设计
以下,对可伸缩高空作业机械臂的控制系统的主控制器进行介绍。主控制器是基于ARM微控制器LPC1788的最小系统的运动控制器。
4.1 LPC1788最小系统设计
最小系统是指去除掉其中任何一部分,该最小系统都无法成为一个独立的系统。本文的最小系统包括LPC1788芯片及其外围电路和接口,为满足与PC通信的需要,进一步添加了串口通信电路。具体而言,最小系统包括LPC1788芯片、复位电路、时钟电路、电源电路和JTAG等。最小系统的框图如6所示。
4.2 电源电路设计
LPC1788是一块功耗比较小的芯片,I/O电压为3.3V。本控制系统采用AMS公司的117M3稳压电源芯片。该芯片包括3.3V和5V这两种电压,能够同时满足LPC1788芯片和外围电路的电力要求。电路原理图如图7所示。
具体而言,电源从DC接口接入,输入的电源经过开关K1后利用电容C1、C2进行滤波,其中,电容C1滤除高频杂波,电容C2滤除低频杂波。滤波之后的电源在利用三端稳压器ASM1117进行稳压之后再次利用电容C3、C4进么滤波,最后输出VCC电压供电路使用。其中,电阻R1和LED构成电源指示电路。
4.3 JTAG接口设计
ARM仿真器支持Flash存储器的在线烧写,并可以在线对程序进行调试。在传统电路仿真中,若线缆过长,则会导致信号失真、仿真插头可靠性差等不良状况。通过LPC1788芯片提供的扫描仿真消除了上述问题。JTAG设计原理如图8所示。另外,在调试程序时,须与IAR编译环境以及仿真器配合使用。
4.4 CANopen通信
高空作业机械臂的关节和伸缩驱动电机与主控制器之间采用CANopen通信。
上位机和两个子系统的控制器通过无线模块传输,它们之间的通信协议为CANopen协议。本文选用PCA82C250。在进行数据收发时,首先,与CAN控制器连接的处理器从其数据存储区读取要发送的数据,将数据与主机的ID地址一起组成的信息帧按照CAN报文结构向发送缓冲器发送。之后,对命令寄存器中的发送请求标志置位,在接收到发送请求之后,CAN控制器自动完成发送过程。当检测到接收缓冲器中存在有效报文之后,接收程序将读取接收缓冲器中的内容。
5 结语
以上,介绍了一种可伸缩高空作业机械臂。结合可伸缩高空作业机械臂的运动以及研制要求,确定了其控制系统的构成,并且对机械臂的控制系统的控制流程进行设计。之后阐述了控制系统的主控制器的最小系统、电源电路以及JTAG接口的设计。该机械臂的控制系统与电机驱动器之间采用CANopen通信方式进行通信。
