一种弓网接触力内嵌式传感器的研制
2019-01-29张鹏飞吴积钦
张鹏飞,钟 源,吴积钦
一种弓网接触力内嵌式传感器的研制
张鹏飞,钟 源,吴积钦
目前常用的几种使用力传感器测量接触力的方法不同程度地影响和改变了受电弓的原有结构,导致测量结果无法反映受电弓的原有特性及实际运行状态,测量系统较复杂且不具有通用性。本文提出一种新型传感器设计将影响降低到最小程度,并确定了测量和补偿方法。经过实体建模、理论推导和试验验证,该传感器具有良好的线性度和准确度,补偿后的接触力测量准确度满足欧标要求。
受电弓;力传感器;弓网接触力;补偿
0 引言
在电力机车(动车组)运行过程中,受电弓与接触网系统的持续稳定接触是列车正常运行的关键。一定的接触力意味着滑板与接触线之间相互接触,保证正常取流,但较大的接触力会导致较大的机械磨耗和接触线抬升;而接触力为零时,滑板与接触线不再接触(俗称“离线”),造成电气磨耗加剧。接触力的波动情况可以反映弓网系统的动力学特性,准确地测量接触力可较精准地评价弓网匹配质量,因此在弓网系统监测中,接触力测量的重要性不言而喻[1]。
根据已有的文献及相关工程经验,常用的接触力测量方法是通过外加力传感器和加速度传感器进行检测,受到弓头质量的影响并基于力系平衡原理,测得接触力后需要进行加速度补偿以进行惯性力修正[2,3]。而与常规的测量方法不同,文献[4]提出利用图像识别的方法得到运行中的弓头弹簧的形变量以推算出接触力和振动加速度的大小,从而计算得到接触力;文献[5]提出一种检测弓网接触力的方案,主要表述了数据的采集分析处理,传感器部分未作描述;文献[6]将力传感器固定在滑板两端支撑点进行测量,结合V/F传输的方法进行数据采集;文献[7]在受电弓滑板与支持装置间装设传感器用以测量弓网接触力,并进行加速度补偿。
就目前弓网接触力检测方法而言,其测试过程及测试设备仍待进一步简化,测试精度仍需要进一步提高。现有的方法实验装置较为复杂,对受电弓原有的结构造成了不同程度的影响甚至破坏,所测得的接触力已不能准确反应受电弓原有的特性。另外,在受电弓高速运行时,通过图像识别的方式会造成误差增加,无法准确地测量接触力。
欧标EN50317-2012[8]提到,受电弓的质量和几何形状受测量系统安装引起的改变应尽可能小,传感器对原有受电弓空气动力特性的改变应该予以修正。在进行弓网接触力测量时,需遵照标准对受电弓进行适度改装,改装应尽可能小地影响受电弓整体结构。本文提出一种新型接触力测量内嵌式传感器,以轴销传感器为主体,兼顾支撑和测力的功能,将支持装置与传感器合二为一,对弓头进行最小程度地改动,将检测设备的种类和数量减为最少,避免受电弓原有特性的改变和空气动力对受电弓的额外影响。基于受电弓激励与弓头转轴应变响应的线性关系,更有针对性地进行接触力测量。
1 测量原理
1.1 弓头结构与简化模型
受电弓弓头的简化模型如图1所示。该模型将滑板托架与转轴之间的部分简化为1对弹簧,弓头与上框架由转轴衔接,承受来自弓头的力,包括弓头自重、接触力、滑板与接触线的摩擦力等。
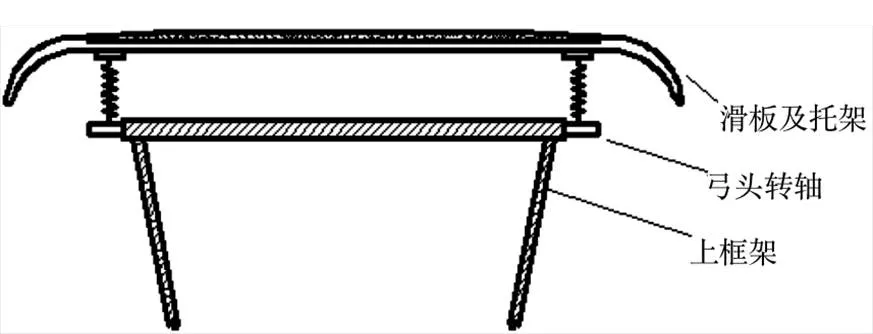
图1 受电弓弓头简化模型1
将转轴单独进行受力分析,如图2所示。
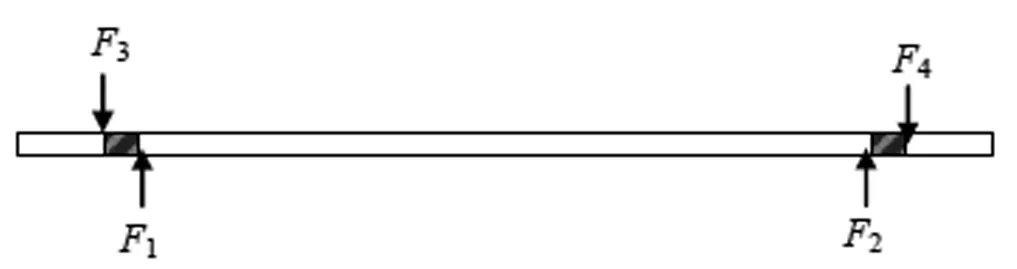
图2 转轴受力分析
1、2为转轴受到的来自受电弓上框架的支持力,方向竖直向上;3、4为转轴承受的来自弓头的压力,包括弓头自重、接触力、摩擦力等,方向竖直向下。左右两侧的阴影部分表示变形区,是力敏的感知部位,当传感器承受负载时,应变集中于该区域,可以被应变片感知。
将上框架的转轴作为一个整体,不考虑其内部受力情况,受电弓弓头简化模型如图3所示。1为弓头质量,2为转轴质量;1、2分别为弓头悬架、转轴与框架之间的刚度,考虑到弓头转轴通过轴承与上框架连接,可以认为2极大;1、2、0分别表示弓头、转轴、框架的位移,其中0= 0。滑板与转轴只有垂直方向的单一自由度。
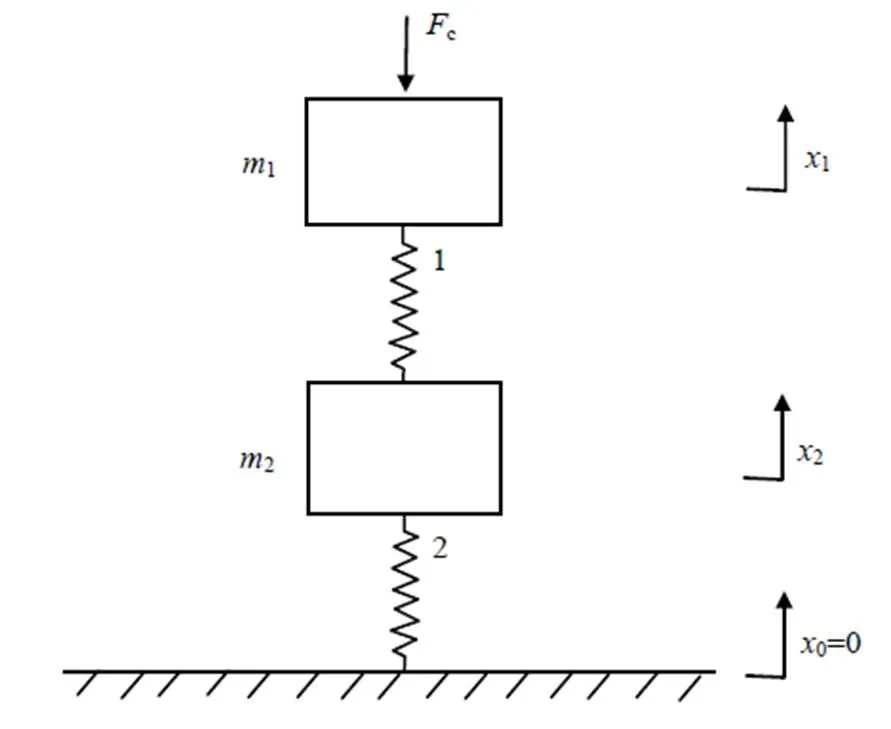
图3 受电弓弓头简化模型2
根据以上二质量块模型可列出二自由度体系运动方程:
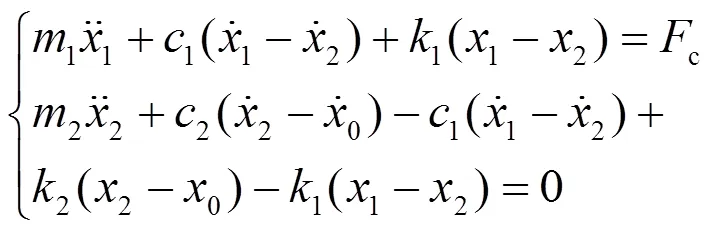
式中,1、2与1、2分别为弹簧1、2的阻尼系数与弹性系数,c为接触力。联立可得

可见,接触力受弓头加速度及转轴的运动速度、位移、加速度的影响,与弓头位移、速度无关。
1.2 内嵌式传感器设计原理
内嵌式传感器依照图2、图3进行设计。1为弓头质量,传感器以两端的变形区为界可以分为3个部分,其质量分别为2、3、4,其中3、4为传感器变形区至弓头连接处的质量,3=4;2为传感器两变形区之间的质量,得到如图4所示的简化模型。1、2为弓头悬架的刚度,3、4为变形区的刚度,5为连接传感器与框架之间轴承的刚度。受电弓弓头左右两侧对称,参数相同,即1=2,1=2,3=4,3=4。1,2,3,4均只有垂直方向的单一自由度。由于左右两侧完全对称,将模型沿对称轴左右分开,只对左侧进行分析。
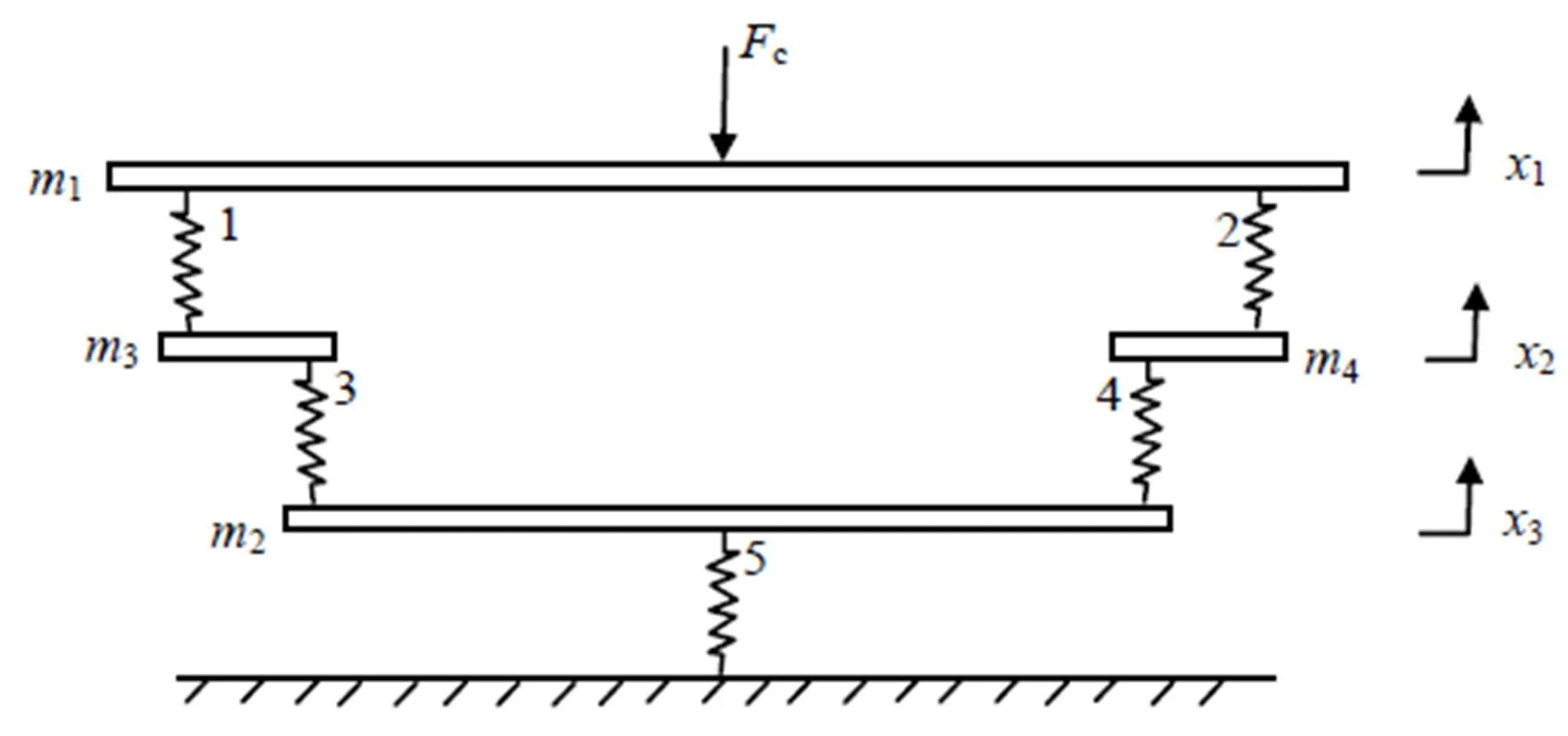
图4 转轴受力分析模型
根据以上三质量块模型可列出三自由度体系运动方程为
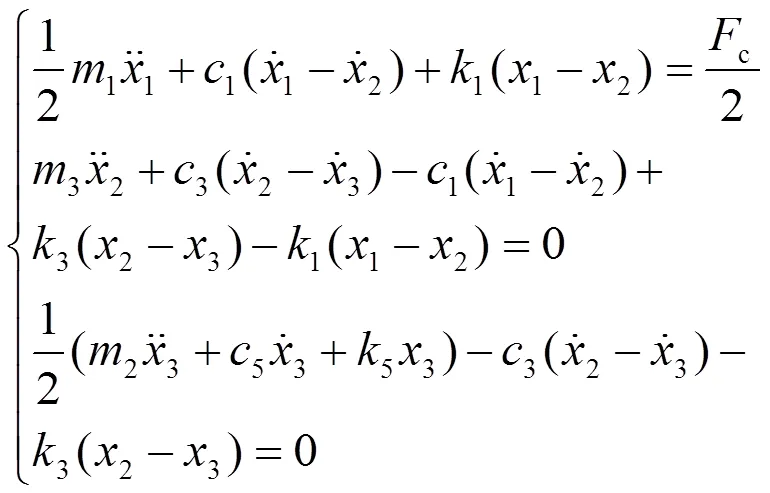
式(3)中3较小,相对于整体质量可忽略不计,阻尼均忽略不计,由此简化后联立可得

式(4)中的3(2-3)实质上是传感器其中一端所受到的力,得出弓头在运动状态下接触力与加速度的关系,为接触力补偿提供依据。


2 传感器结构设计及补偿
为验证上述接触力测量方法,以某国产受电弓为试验对象,根据上述思路设计对应尺寸的内嵌传感器。该型受电弓的转轴贯穿上框架左右,通过4个螺栓与弓头衔接,并承担所有来自弓头的力,因此内嵌传感器可适用于该型受电弓。将转轴替换为内嵌传感器进行接触力测量,具有以下优势:(1)部件外形简单,尺寸易测量和控制,加工难度低;(2)原理简单,理论基础成熟;(3)替换受电弓原有部件后,既能实现原有的支持功能,又兼顾传感器测力的功能,对受电弓原有结构影响最小。
传感器安装于上框架顶管位置(图5),其截面直径与原转轴截面直径完全相同。传感器两端变形区是测力的力敏部位,施加负载后既要有能够被应变片感知的足够大应变,还需满足弹性极限强度要求[9]。变形区预留30~50 mm,相比原有结构,传感器长度稍有增加,但对整体结构影响较小。
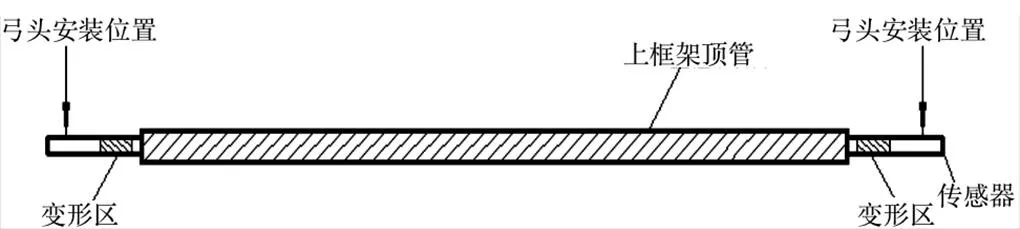
图5 传感器简化示意图
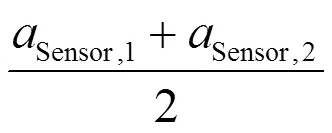
根据欧标EN 50317-2012要求[5],接触力测量时必须进行加速度补偿,以消除弓头上下晃动的影响。补偿后的接触力应由下式进行计算:

加速度补偿需要在测量接触力的同时测出弓头的加速度。加速度传感器与内嵌压力传感器同时安装,其中加速度传感器在弓头前后滑板中心各安装1个,用以测量竖直方向的加速度,压力传感器只有1个。按照式(6)要求,需要将2个加速度传感器的示数取平均值作为加速度值代入。
在本例中,传感器的设计与安装对受电弓原本特性影响很小,符合欧标EN50317-2012中测试系统对原有空气特性影响不得超过5%的要求,因此不需要进行空气动力修正,取corr,areo= 0。结合式(6)、式(5),接触力最终计算式为
式(7)是欧标给出的加速度补偿依据,式(6)为理论推导出的加速度补偿计算式,当corr,areo= 0时,式(6)与式(7)具有相同的形式。
3 测试及分析
3.1 静态测试
进行动态测试前,需要先对内嵌传感器进行静态测试,以验证传感器的线性特性,并标注零点。图6为静态测试设备示意图。

图6 静态测试设备示意图
标准传感器的输出特性已经过专业标定。静止状态下,标准传感器与内嵌传感器所受力大小相等,方向相反,因此标准传感器的示数为该时刻下的接触力大小。内嵌式传感器以灵敏度作为输出,经在不同接触力大小下采集、测量、比对,得到不同接触力下2个传感器的多组示数如图7所示。
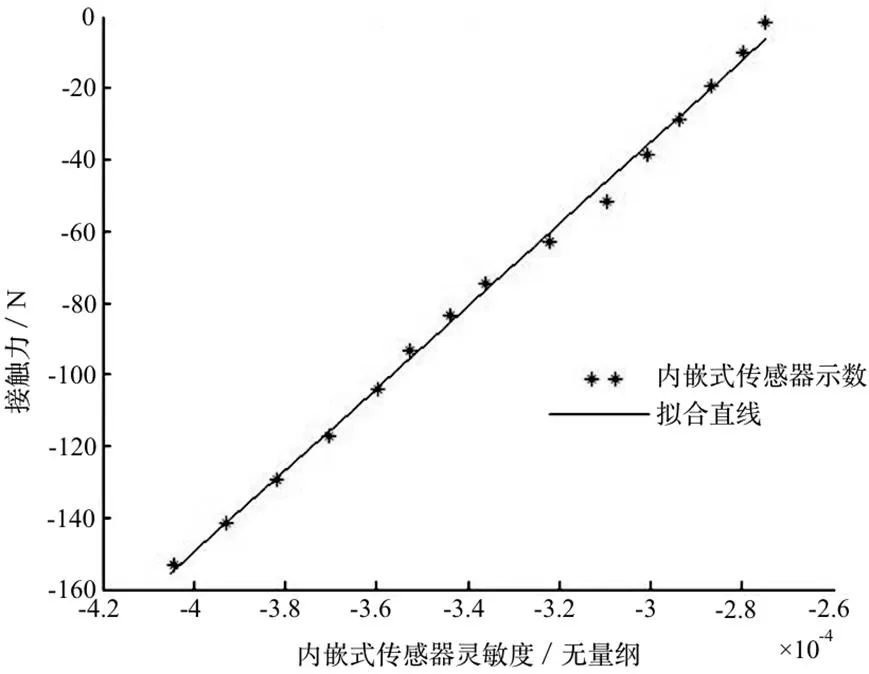
图7 内嵌传感器示数与受力关系
内嵌传感器的受力大小等于接触力大小,两传感器的输出一一对应。图7中纵坐标为标准传感器受力大小,横坐标为内嵌传感器的输出。以同一时刻下2个传感器的示数作为一组,图像体现了该传感器的输出特性,具有很好的线性特征,受力与输出的关系近似为一次函数关系。利用Matlab进行线性拟合后,得到该传感器的输出特性为
= 1 147 171.117 904 45+ 309.147 453 26(8)
式中,为内嵌传感器输出;为施加的负载,N。
3.2 动态测试
模拟4种大小不同的接触力,使用激振器对滑板施加步长为1,频率范围1~20 Hz的正弦波振动进行多组试验。在试验进行过程中同时采集标准传感器、内嵌传感器、2个加速度传感器的输出。由于试验次数多,数据量巨大,只取其中一组(接触力为83.24 N,频率为4 Hz)进行分析。
加速度1、加速度2分别为固定于前后滑板上的加速度传感器的输出,周期为0.25 s。2路传感器的输出基本一致,表示前后滑板运动状态一致。加速度最大值与最小值均约为4 m/s2,平均值为0。
标准传感器与内嵌传感器输出对比如图8所示,对输出进行加速度补偿后的结果如图9所示。由图8可以看出,未加补偿前,内嵌传感器示数的幅值小于标准传感器示数,但变化趋势相同,周期为0.25 s;接触力最大约为160 N,而内嵌传感器测得的接触力最大约为120 N,平均值均为70 N。
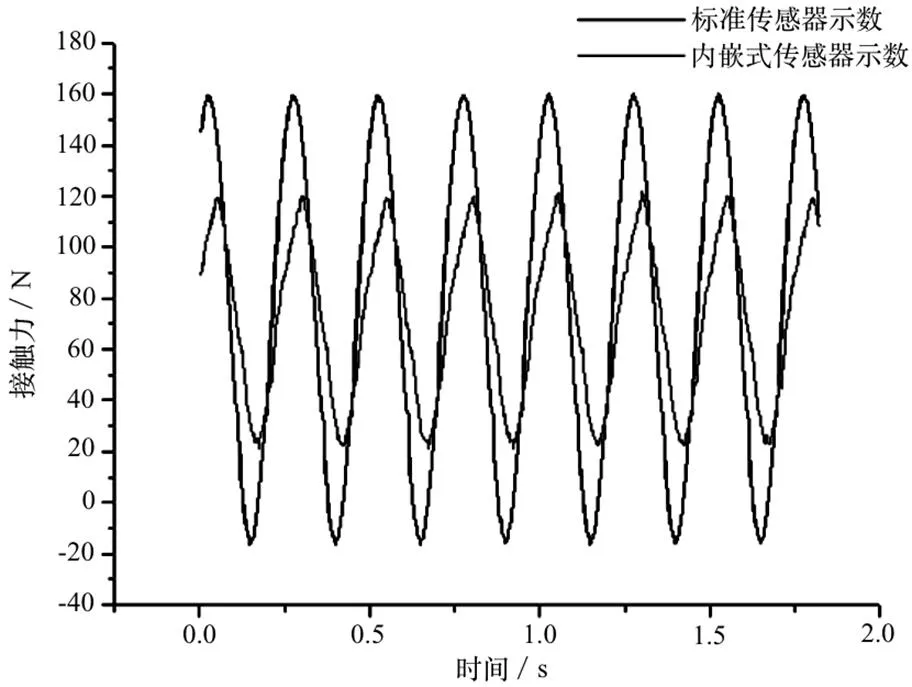
图8 传感器的输出对比
由图9可以看出,进行加速度补偿后,2条曲线基本重合,加速度补偿效果良好,内嵌传感器输出经过补偿的结果与实际接触力基本一致。分析试验结果得出以下结论:
(1)在一个周期内,标准传感器受力最大值为160.48 N,最小值为-16.71 N;内嵌传感器受力最大值为159.95 N,最小值为-13.36 N。根据误差率计算式,得出该工况下的误差率为0.098;
(2)受到弓头重量的影响,需要进行加速度补偿,补偿后的结果基本与标准值吻合;
(3)在整个测试频率范围内,该传感器较好地反映了接触力的变化趋势,具有良好的跟随性;
(4)分析对比同一时刻的多组试验数据,内嵌传感器的输出相较于标准传感器有一定的相位滞后,这是由弓头内部的刚度和阻尼造成,可以通过加速度补偿消除该影响。
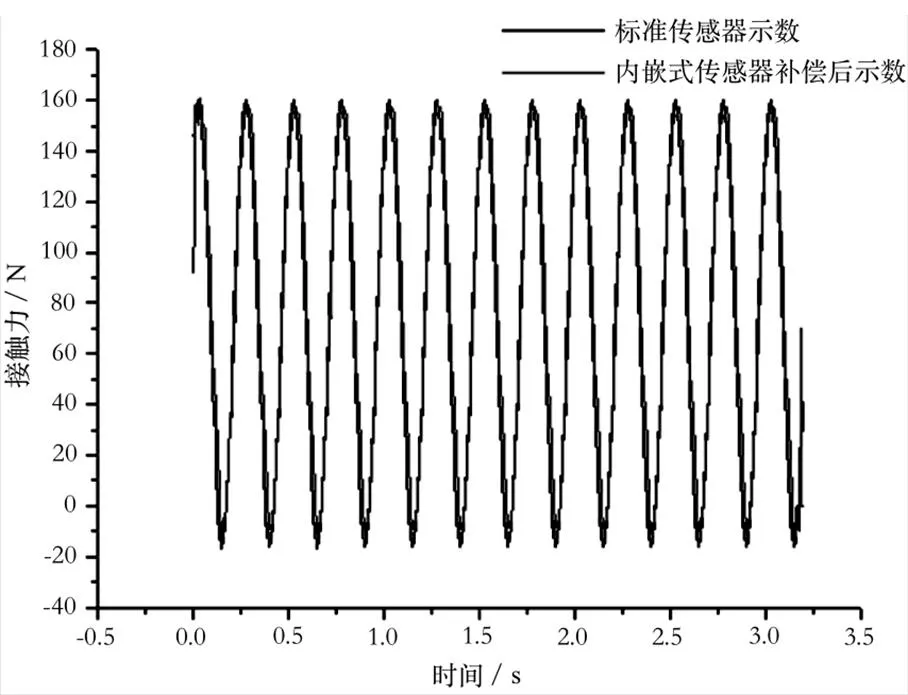
图9 补偿后示数与标准值比较
3.3 准确度分析
根据欧标EN50317-2012要求,为了评估传感器的准确性,需要计算传感器的准确度,以作为评估标准。的计算式为
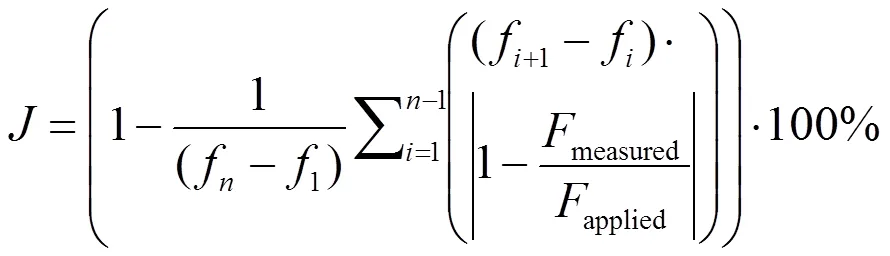
式中,f为第组数据对应的频率;1为试验初始频率;measured、applied分别为接触力测量值和标准值。
在1~20 Hz频率范围内,当测量系统的准确度达到90%以上时,该测量系统才能被认为是准确的[8]。经计算,不同接触力大小下的传感器准确度如表1所示。在不同的静态升弓力下,准确度有少许差异,但总体来看,传感器的准确度平均值为92.5%,能够达到≥90%的要求。
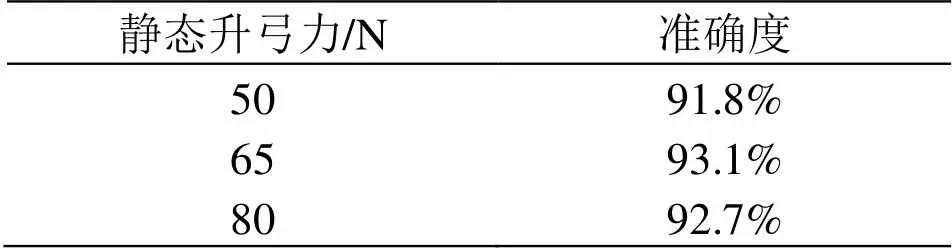
表1 传感器准确度
4 结语
弓网接触力内嵌式传感器的制作从选型、结构分析、设计、加工多方面进行考虑,试验过程严格遵照欧标EN50317-2012要求。整个传感器可以在尽可能小地改动受电弓弓头原有结构的前提下准确地进行接触力测量;将转轴替换为内嵌式传感器,使之兼具承载与测力的功能,避免外加过多部件导致弓头结构及特性改变,无需进行空气动力的修正;应用广泛,结构简单,相比于原有的测量方法,所涉及的变量较少。
通过多组多条件下的静态测试与动态测试,验证了该传感器的优良特性,试验数据与标准值符合较好,准确度可满足欧标要求。在数据分析中,由于3远小于整体质量,在补偿时将其忽略,使得推导出的补偿计算式与欧标EN50317-2012所要求的形式一致,使分析过程简便,结果简化。
经实验室试验,该传感器的准确性已经得到验证,后续还需经实际线路实测,以实现传感器的实际应用。
[1] 吴积钦. 受电弓与接触网系统[M]. 成都. 西南交通大学出版社,2010:20-21.
[2] SEO S I, CHO Y H, MOK JY. A study on the measurement of contact force of pantograph on high speed train[J]. Journal of Mechanical Science and Technology, 2006, 20(10): 1548-1556.
[3] 杜高峰,伍川辉. 受电弓动态检测方法研究[J]. 硅谷,2014(16):48-69.
[4] KOYAMA T. Measurement of the contact force of the pantograph by image processing technology[J]. Quarterly Report of Railway Technical Research Institute, 2014, 55(2):73-78.
[5] 邢继军,戚艳军. 一种检测弓网接触力的方案[J]. 软件导刊,2008,7(4):7-8.
[6] 陈轲,王泽勇,王黎,等. 一种新型弓网接触压力检测方案[J]. 上海铁道科技,2005(6):16-18.
[7] 刘芳,王黎,高晓蓉,等. 受电弓与接触网间的接触压力检测研究[J]. 电力机车与城轨车辆,2006,29(6):19-54.
[8] BSI Standards Publication. EN50317-2012. Railway applications-Current collection systems-Requirements for and validation of measurements of the dynamic interaction between pantograph and overhead contact line[S].
[9] 韩江义,高翔. 一种检测拖拉机牵引力的轴销式传感器的研制[J]. 农业装备与车辆工程,2014,52(11):10-13.
The several common methods used at present for measurement of contact force by force sensors affect and change the pantograph’s original structure in different degrees, and lead to that the measurement results are unable to reflect the original characteristics and actual operation status of the pantograph, the measurement system is rather complicated and is of non-commonality. The paper puts forward a new type of sensor design in order to minimize the influence and determine the methods for measurement and compensation. By solid modeling, theoretical derivation and test verification, the sensor has proper linearity and accuracy, and the accuracy of contact force measurement after compensation complies with the requirements of European Standard.
Pantograph; force sensor; pantograph-catenary contact force; compensation
10.19587/j.cnki.1007-936x.2018.06.013
U264.3
A
1007-936X(2018)06-0054-05
2018-09-13
张鹏飞.广州地铁设计研究院股份有限公司,硕士研究生;
钟 源.西南交通大学电气工程学院,博士研究生;
吴积钦.西南交通大学电气工程学院,教授。
