基于DC-DC变换器双脉宽调制数字控制设计
2019-01-28魏华汝张俊洪
魏华汝,张俊洪,高 嵬,彭 威
基于DC-DC变换器双脉宽调制数字控制设计
魏华汝,张俊洪,高 嵬,彭 威
(海军工程大学电气工程学院,武汉 430033)
基于双脉宽调制的客观需要,本文采用了PID补偿网络方法来对系统性能进行优化。构建闭环反馈的方式来提升直流输出的质量,同时使得整个系统保持更高的稳定性。本研究用增量代替微分的思想使数字补偿替代模拟补偿,根据DSP28335数字信号处理器的特点设计了产生双脉宽信号的方法,并通过仿真实验证明了PID补偿对系统的优化效果。
双脉宽调制 数字控制 PID
0 引言
PID控制器目前已经广泛应用到了工业工程中,其使用具有明显的优势,主要体现在实现简单、稳定性与鲁棒性较强等方面,可以将其有效地应用到大多数情况下的控制系统中。随着PID控制器技术的发展,目前逐步将其拓展到了建材、电气、化工以及自动控制等领域中,其使得整个系统的稳定性与可靠性得到了较高的保证。相关数据表明,当前采用最多的控制技术即为PID控制技术,其在实际工程中的应用比例已经达到了90%以上,而其他诸如手工控制方式以及智能控制方式等所占据的比例较低。通过文献也可以了解到,目前在工业控制中的PID结构回路比例已经高达95%。经过上述分析可以看到PID控制技术具有较为明显的优势,并且较为普遍的应用到了当前的工业生产中。
1 双脉宽调制基本原理
传统的单脉宽调制在一个开关周期中,只有一次开通和开关,虽然原理简单,易于实现,但输出电压谐波含量高,对输出滤波器设计要求比较高。双脉宽调制可以有效实现对输出电压谐波各次谐波含量的控制,根据实际需要灵活分配开通和关断时间的起始时刻。
在占空比高于0.5时选择使用电流控制模式容易引起输出电流中的谐波震荡,此时对谐波抑制效果的分析容易造成影响。而使用指环控制模式需要在滤波电路方面付出较大的精力,其性能也比较容易受到干扰。电压控制模式在稳定性与抗干扰性方面具有明显的优势,因此经过分析可以选择使用电压控制模式来完成本实验,其中图1中展示的即为Buck电路闭环结构。

图1 系统闭环结构图
2 PID控制理论
PID控制方式可以依据比例(P),积分(I),微分(D)进行组合的形式来对偏差进行控制,PID控制的作用体现在如下几个方面:首先需要通过比例环节对控制系统的偏差信号e(T)进行高效地展现,并在较短的时间内得到控制函数,使得偏差调节到最小方向。而在比例系数逐步增大的过程中,稳定性误差会出现降低,使得动态性能降低,超调量提升。其次是积分环节,其主要应用到对静力差的消除过程中,当闭环系统呈现出稳定状态时,控制输出与控制偏差将会实现较高的稳定性。其积分强度大小与积分时间常数存在直接的关系。如果时间常数变大,积分作用就会降低,否则其会出现明显的上升。而在积分时间常数逐步变小的过程中,静态误差会降低,但是积分常数过小时会导致其振荡更加明显,稳定性降低。第三是微分环节,其主要对系统稳定性与响应速度进行调节。如果偏差信号过大,可以采用对其进行校正的方式降低系统的动态速率,并有效地减少时间。具体原理如下图所示:
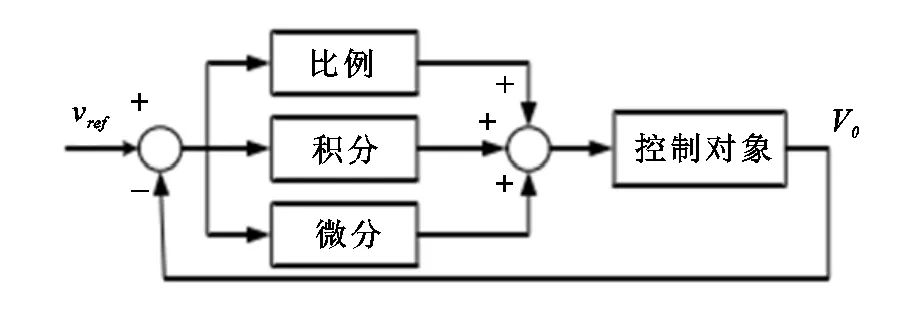
图2 PID原理示意图
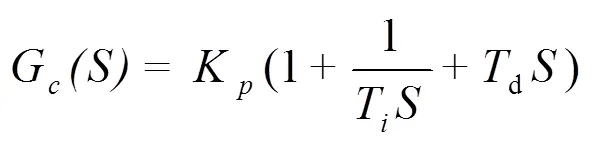
其传递函数表达式可表示为:
1)比例作用对控制性能的影响
2)微分作用对控制性能的影响

3)积分作用对控制性能的影响

3 双脉宽调制下PID补偿器数字实现
3.1 PID数字补偿器实现
随着DSP技术的发展,其应用逐步拓展到了各个领域中,并使得数字控制技术发挥了更大的作用。数字处理器在数据管理方面具有明显的优势,其处理能力较强、效率高、读写速度快,同时随着数字处理器研制技术的提升,其成本也逐步降低,这都使得其逐步得到了更多的应用。相对于先前的模拟控制技术,数字化控制电路的性能更加卓越,其在稳定性、抗干扰性以及温度控制等方面都能够达到更好的效果。另外其只需要对程序中的参数进行设置即可调整其控制方式,而没有涉及到硬件部分的更改,这使得其使用更加便捷,在降低成本的同时显著地提升了研发效率。如果系统发生故障,则可以直接利用USB方式进行检测和修复,使其能够在较短的时间内恢复运行。

图3 DSP控制实现PID补偿的结构图
本文经过多方面的考虑选择使用了DSP28335数字控制系统,具体即为图3所示,其经过一系列的处理过程之后可以将数据传输到DSP28335控制器中进行处理,并完成PID补偿的过程,此时可以得到移相的双脉宽信号,并对开关管进行合理的控制。

图4 DSP28335数字控制系统结构图

对(2)式进行转换处理之后可以得到数字补偿器形式,具体公式如下所示。其算法流程图如图5所示,实现数字补偿器。



图5 PID算法流程图

图6 移相双脉宽PWM信号产生流程图
3.2 移相双脉宽调制实现
采用DSP28335对偏差值处理完成之后即可得到PWM信号的总占空比,此时可以将各个占空比的移相以及脉宽值H、G进行制表,并基于实际的占空比来设计调制方式,其具体的过程即为图6中所示。
对于DSP28335来说,其含有的增强型ePWM数目是6个,各个ePWM都集成了特定的时间基准器与相位控制器。其中前者的功能主要是对PWM频率进行调节,而后者则是对相位进行合理的控制。基于寄存器计数以及时间基准寄存器即可对PWM信号的占空比进行调整。
如果是递增计数模式,PWM2、PWM1的脉宽比值大小是H,此时可以将2个ePWM的TBPRD值设置相同,即满足条CMPA=H*CMPB。然后设置条件TBPHS= G*CMPA,即可使得第二个脉宽和第一个脉宽的相位差相与第一个脉宽占空比之间的比值为G。移相双脉宽调制的具体过程如下图所示:

图7 移相双脉宽信号产生原理
4 小结
本文在设计PID补偿网络时选用了零极点配置法,很大程度上提高了电路的稳定性,使BUCK电路获得良好的动态性能,通过用增量代替微分的思想使数字补偿替代模拟补偿,根据DSP28335数字信号处理器的特点设计了产生双脉宽信号的方法以及PID网络补偿的算法。系统保持了较高的稳定性。系统的超调量得到了明显地降低,同时其响应速度提升,因此可以证明采用PID网络补偿方式能够有效地优化系统的动态性能。
[1] 郑球, 王诗比. 系统的鲁棒性分析与设计[J]. 信息与控制, 1989, 18 (6): 15-18.
[2] 瞿刚. 一种智能鲁棒控制算法[J]. 信息与控制, 1989, 18(1): 52-58.
[3] 张卫东. PID控制器自整定技术的发展[R]. 2002年世界控制大会总结报告, 2002.
[4] Tang Shi and M. X. Wang. Auto-tuning PID cont-rol for long time delay process[J]. Journal of Shanghai Jiaotong University, 2002, 36(4): 559-562.
[5] 周楚. 基于DSP的数字PID控制DC-DC变换器的设计[D]. 武汉: 华中师范大学.
[6] 嵇保健. 基于DSP的DC/DC变换器数字控制的研究[J]. 南京航空航天大学, 2007.
[7] 刘陵顺, 高艳丽, 张树团, 王防. DSP原理与开发编程[M]. 北京: 航空航天大学出社, 2011, (12): 123-140.
Design of Double Pulse Width Modulation Digital Control Based on DC-DC Converter
Wei Huaru, Zhang Junhong, Gao Wei, Peng Wei
(Electrical Engineering School of Naval Engineering University, Wuhan 430033, China)
dual width modulation; digital control; PID
TM464
A
1003-4862(2019)01-0053-04
2018-08-10
魏华汝(1994-),男,硕士。研究方向:电力电子与电力传动。E-mail: 1045438544@qq.com
