基于STM32F103VET6 的触摸屏导引系统设计
2019-01-26汪勇
汪勇
(宿迁学院机电工程学院,江苏 宿迁 223800)
随着科学技术与生产水平的不断发展提升,在一定程度上推动了智能导引系统的进一步研究与发展,对现代化技术下智能导引系统的精确性以及便携式、场景化等需求有更好的满足和实现,成为现代生产与设计领域研究和关注的重点内容之一。另外,触摸屏作为现代信息技术与生产能力支持下的一种显示设备,不仅操作使用简便,且价格成本也相对较低,因此,在智能导引系统的设计与研究发展中,将计算机网络的嵌入式系统与触摸屏技术相结合,进行以独立导引以及具有用户交互功能的新的系统平台开发设计与研究应用,其价值作用和意义更为显著。下文将结合现有的研究理论和成果,提出一种基于STM32F103VET6 的触摸屏导引控制系统,并对其具体设计进行分析,在此基础上,通过仿真实验对其设计应用进行验证研究。
1 基于STM32F103VET6 的触摸屏导引系统设计分析
1.1 硬件结构设计
本文所提出的触摸屏导引系统设计方案,是采用嵌入式系统功能,由STM32F103VET6 微处理器主板与SD 卡、触摸屏等构成的导引系统控制平台。其中,在进行触摸屏结构设计中,根据现有研究理论,触摸屏一般会与液晶显示屏以及控制芯片等结构部件相互结合设计运用,以形成相应的具有便携式与交互性功能的输入和输出显示系统。此外,本文所提出的设计方案中,触摸屏为3.2 英寸的LED 触摸显示屏,而SD 卡的存储容量为2G。如图1 所示,即为该触摸屏导引系统控制平台的硬件结构示意图。
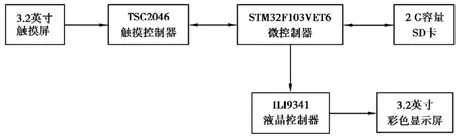
图1 基于STM32F103VET6 的触摸屏导引系统控制平台硬件结构图
根据图1 可以看出,该导引系统控制平台的硬件组成主要包含TSC2046 触摸控制器以及触摸屏、ILI9341液晶控制器、微控制器、TSC2046 触摸控制器、彩色显示屏等,该系统平台通过四线电阻式触摸屏对外部触摸动作进行感知,并通过专用的四线电阻式触摸屏的TSC2046 触摸控制器与微处理器等相互作用实现外部触摸信号的采集实现,再将相应的电压信号利用SPI 总线向微处理器中进行传输,以进行该导引系统控制平台的数据采集与输入支持。在实现数据的采集与输入后,由导引系统的处理器芯片进行输入数据格式转换,其数据转换过程中是结合所输入电压值的对应空间坐标线性关系与触摸屏的触摸点对应坐标进行数据转换实现的,对转换数据利用SPI 通信接口进行触摸屏控制器的命令操作,并将触摸屏控制器中的相应坐标信息向微控制器中传输,由微控制器进行处理。其中,STM32F103VET6微处理器主板对触摸坐标信息与所对应有效区域进行判断后,实现SD 卡中对应图片信息在FSMC 接口的通信支持下向ILI9341 控制器中写入,以实现不同图片与触摸屏对应触摸坐标信息的切换控制,完成对导引系统控制平台的场景化导引。
上述基于STM32F103VET6 的触摸屏导引系统控制平台硬件结构中,触摸屏是采用控制方式相对简单并且价格成本较低的电阻式触摸屏,其在工作运行中,在接收触摸动作指令后,触摸屏中阻性材料一端参考电压会与另一端接地电压之间形成沿坐标方向运行的均匀电场,并且因触摸动作点位置的电压与其到电极之间的距离为线性关系,因此能够通过触摸动作点电压变化对触摸动作点与触摸屏阻性材料和动作点之间的距离变化进行反映,进而实现触摸动作点的电压值计算测量,并在改变电场方向的情况对其相应的方向坐标进行确定,满足触摸屏的触摸感应功能。此外,该系统平台中的TSC2046 控制器属于一种寄存器型A/D 转换器,在实现数据采样的过程中还具有保持功能。而ILI9341 控制器则是具有TFT 液晶显示的单芯片控制驱动器,能够通过液晶显示对其控制解决方案进行直观呈现,主要由320 通道栅极驱动器与720 通道源极驱动器、具有图形显示的GRAM、供电电路等构成。
1.2 软件系统设计
基于STM32F103VET6 的触摸屏导引系统控制平台软件设计中,首先需要根据上述所设计的硬件系统与结构情况,在对有关软件系统进行初始化,初始化内容包含系统的串口以及时钟、液晶显示、触摸屏控以及SD 卡等系统程序;此外,需要进行触摸屏导引控制平台的触摸屏触摸功能校准,以确保触摸的准确性。同时对触摸区域进行判断,结合相应的触摸区域设置对相应的触摸响应以及图片切换效果等进行判断,以确保在触摸导引控制过程中触摸与导引控制的效果。如图2 所示,即为基于STM32F103VET6的触摸屏导引系统控制平台软件设计流程示意图。
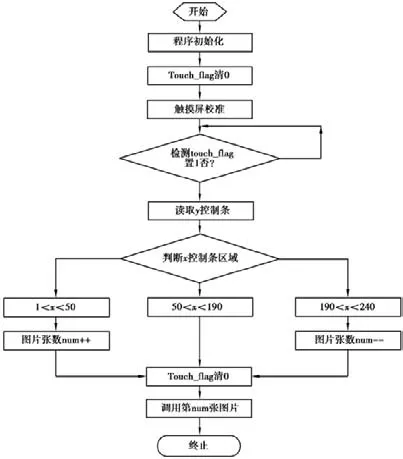
图2 基于STM32F103VET6 的触摸屏导引系统控制平台软件设计流程示意图
2 基于STM32F103VET6 的触摸屏导引系统仿真实验分析
根据上述对基于STM32F103VET6 的触摸屏导引系统控制平台的设计分析,为对该系统平台的设计与应用可行性进行验证,为相关实践及研究提供参考。结合上述对该系统平台的硬件结构与软件系统设计分析,在完成该系统平台设计后,以某公园的真实场景为例,采用该基于STM32F103VET6 的触摸屏导引系统平台进行引导模拟与仿真实现,以根据实验结果对该系统平台的功能进行验证评价。如下图3 中(1)和(2)所示,分别为根据上述设计方案进行相应的基于STM32F103VET6 的触摸屏导引系统设计后,对该系统平台的触摸屏校准设置以及进行某公园真实场景引导的图片切换效果示意图。根据下图的仿真实验模拟分析效果可以看出,该系统平台的设计方案具有可行性,并且在实际应用中能够根据触摸动作要求进行场景图片之间的合理切换,满足相应的场景导引功能。

图3 基于STM32F103VET6 的触摸屏导引系统控制平台仿真实验结果
此外,根据实践验证分析,根据上述设计方案所开发设计的触摸屏导引系统控制平台,不仅在公园等位置导引中能够实现场景的自主导引,而且在医院以及多种旅游景点、图书馆等场所也能够满足其自主导引功能,在一定程度上减轻其人工导引的工作量,并且具有较为突出的便携性与操作简单性等特点,能够在有关实践中实现较好的推广应用。
3 结语
总之,本文通过提出一种基于STM32F103VET6的触摸屏导引系统控制平台设计方案,并对其具体设计进行分析,在此基础上通过仿真实验对该系统平台的设计应用进行验证分析,在推进智能导引系统的设计与研究进一步发展方面具有相应的作用。
