等离子体引弧装置的设计
2019-01-26王嘉禾江志和邵明强薛志刚
王嘉禾,江志和,邵明强,薛志刚
(久智光电子材料科技有限公司,河北 廊坊 065000)
传统等离子固相外沉积法生产过程中,需要人工进行生产操作、手动进行等离子弧光的引发动作,既不安全,也会将外界杂质引入加工室内。根据对等离子体引弧装置动作的研究,得到一种自动化等离子体引弧装置,提高了产品质量,减少人工操作,提高了生产效率,目前已应用到实际生产中。
1 背景技术
现有等离子体引弧装置是由支撑臂、直线气缸、轴承、旋转气缸和引弧组件组成,将等离子引弧组件靠近于等离子发生组件附近,待等离子火焰发出,需要人工将引弧装置第一时间撤离等离子发生组件,防止引弧组件高温损毁。
现有等离子引弧装置使用直线气缸抬起支撑臂,支撑臂抬起后,旋转气缸动作,将引弧组件靠近于等离子发生组件。在气缸作用过程中,无法准确控制运动过程,以及运动终点。对等离子发生组件与引弧装置的相对位置要求很高,在相对位置发生改变后,相对位置调节过程复杂。
在运动的过程中,压缩空气压力小会造成直线气缸、旋转气缸无法克服重力及阻力动作,压缩空气压力大会造成气缸运动剧烈,震动损毁引弧组件与等离子发生组件。
旋转气缸在旋转过程中,会带动引弧装置轴向运动,占用空间大,容易造成引弧装置与其他设备的碰撞。
2 根据实际情况对方案进行分析和改进
结合背景技术实际生产使用过程故障率,发现将引弧装置靠近等离子体发生组件的过程中,最容易出现问题,在调节引弧组件与等离子体发生组件的过程中,还需要人工进行干预。所以新型等离子体引弧装置的设计重点在于将轴向运动改为更为简单的直线运动,并寻求一种更加稳定、可控的动力组件。
针对现有技术的缺陷,设计一款运动简单,占用空间小,可实现自动控制的等离子体引弧装置,如图1。
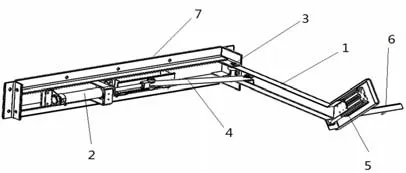
图1 等离子体引弧装置
新型等离子体引弧装置由支撑臂1、电动执行器2、轴承3、支撑杆4、多导杆气缸5、引弧组件6 和底座7组成。
轴承3 设置于底座7 的一端,并且与支撑臂1 的一端活动连接,支撑臂1 与支撑杆4 连接,支撑杆4 与电动执行器2 相连接;支撑臂1 的另一端与多导杆气缸5相连,多导杆气缸5 与引弧组件6 相连;支撑杆4 与电动执行器2 为活动连接;支撑杆4 与支撑臂1 为活动连接。

图2 引弧装置起始位置
新型等离子引弧装置回收时支撑臂1 与底座7 平行,压缩了占用空间,防止与其他设备发生碰撞,如图2。
为了减除引弧组件6 与等离子发生组件相对位置需人工检查到位情况,设计中对电动执行器2 和多导杆气缸5 安装了磁性接近开关,可以检测到动作是否到位,并由程序判断是否进行下一步骤动作。
引弧过程中,操作人员位于等离子发生室外,在配电柜中触发引弧按钮。电动执行器2 运动,伸出支撑臂,水平方向推动支撑杆4,如图3。
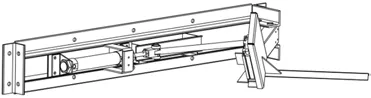
图3 引弧装置伸出动作
在电动执行器2 运动过程中,支撑杆4 将力传递给支撑臂1 上,并将支撑臂1 沿轴向摆出,直至支撑臂1与支撑架7 垂直,触发磁性接近开关。磁性接近开关将信号传送给自动控制系统,自动控制系统收到开关量信号后判断支撑臂1 轴向运动到位,触发多导杆气缸5 动作,将引弧组件6 靠近等离子发生组件,待多导杆气缸5 移动到工艺位置后,触发磁性接近开关,将引弧组件6 到位信号传送给自动控制系统,并完成引弧动作,如图4。
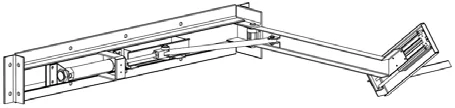
图4 引弧装置伸出位置
引弧动作完成后,为了防止等离子火焰的高温损毁引弧组件6,需要第一时间将引弧组件撤离等离子火焰处。所以设计中增加了工业级弧光传感器,该光学传感器可以在检测到等离子火焰发出,并将信号传递给自动控制系统。经自动控制系统判断,触发多导杆气缸5,将引弧组件6 远离等离子发生组件,并触发磁性接近开关,如图5。

图5 引弧装置缩回位置
自动控制系统收到多导杆气缸5 回收到位指令后,发出指令,控制电动执行器2 回收,达到将引弧装置折叠,压缩空间的作用。
3 结语
与背景技术相比,本装置具有如下有益效果:电动执行器2 可根据要求调整行进速度,会根据设定速度调整电动执行器2 中伺服电机扭矩,保证了电动执行器2 在每个运行周期的速度,避免了运行过程中的剧烈碰撞,保护等离子体发生装置。电动执行器2 精确带动支撑杆控制支撑臂的位置运动,节省了人力进行位置调节,保证了运动过程中的稳定性,保护了其他设备不受到损毁。
导杆气缸5 会在电动执行器2 运行到位后启动,将引弧组件6 沿直线方向靠近等离子体发生装置,在直线运动中,不会与其他相关设备产生碰撞,并压缩设备空间。
