改进的PR 控制器对PMSM 电流的矢量控制策略
2019-01-24赖海琳吴海彬
赖海琳,吴海彬
(福州大学机械工程及自动化学院,福建 福州 350108)
0 引言
目前,转子磁场定向的矢量控制方法因诸多优点而被广泛应用于PMSM控制系统中[1].其中,电流控制环是PMSM矢量控制技术中的一部分.基于比例积分(PI)控制器的电流矢量控制是一种常规的方案[2],传统的PMSM矢量控制就是一个例子[3-4].通过2次坐标变换,将自然坐标系下定子的三相电流分解成在同步旋转坐标系下的励磁电流和转矩电流,分别与速度环输出的电流信号进行比较后输入PI控制器进行电流环控制,再将PI控制器输出的控制信号通过1次坐标变换到静止坐标系下进行矢量调制.传统PMSM矢量控制的整个过程需要进行3次坐标变换,增加了控制算法的难度[5-6].同时,由于电机自身结构,为了获得更好的性能,通过PI控制器进行电流矢量控制需实现电压解耦控制,消除动态耦合[7],增加了控制系统的复杂性,并且解耦项的部分参数随温度的变化而改变,使电机运行时性能有所下降[8].
近年来,比例谐振(PR)控制器在逆变电源控制中有着广泛的应用[9],但是在PMSM控制上使用较少.PR控制器可以避免多次坐标变换,使计算量大为降低,并且控制效果与同步坐标系下的PI控制器几乎相同,能无稳态误差地跟踪特定频率的信号.由于PR控制器的优点,可以将其应用在PMSM控制上.PR控制器虽然在基频处有着高增益,但是频带过窄[10],而在非基频处低增益频带宽,这使PR控制器无法抑制大部分处在非基频处的干扰信号[11],不利于系统的稳定.为使PR控制器在PMSM控制上得到更好的应用,通常用改进的PR控制器实现对PMSM的矢量控制.目前,改进的PR控制器在PMSM上的应用,大多是通过分解广义积分项和脉冲响应不变法对PR控制器进行离散化处理.这两种离散方法计算复杂,且会产生频率混叠.双线变换法不存在频率混叠效应[12].因此,本研究通过双线性变换法对PR控制器进行离散处理,提出一种基于改进PR控制器的在静止坐标下对PMSM电流的矢量控制策略.经实验和仿真,证实了该方法的正确性.该控制算法实现在静止坐标系下对交流信号的无静差调节[13],对指定频率的谐波可以进行有选择性的补偿[14],无需通过对解耦项进行精确解耦的方式来提高电机的工作性能,使PMSM控制系统结构更加简单.同时,静止坐标下的计算降低了算法的复杂度,提高了系统的鲁棒性.控制性能与PI控制器相比有所改善.
1 建立PMSM数学模型
1.1 坐标变换原理
在ABC自然坐标系下,三相PMSM的物理模型如图1所示.图1中,A、B和C分别为电机三相定子绕组的轴线;θe为转子位置角;Φm为永磁体磁链,ωe为转速;a-a、b-b和c-c表示三组线圈,线圈上存在电感和电阻.
为简化自然坐标系下三相PMSM的数学模型,采用坐标变换包括静止坐标变换和旋转坐标变换.它们之间的关系如图2所示.图2中,ABC为自然坐标系,A、B和C三个坐标轴空间互差120°;d-q为旋转坐标系,d和q两个坐标轴空间互差90°;α-β为静止坐标系,α和β两个坐标轴空间互差90°.θe为转子位置角.

图1 PMSM物理模型Fig.1 PMSM physical model

图2 各坐标之间的关系Fig.2 Relationship between the coordinates
静止坐标变换是将自然坐标ABC变换到α-β静止坐标系,根据图2所示的各坐标系之间的关系,可得变换方程:
(1)
旋转坐标变换是将静止坐标系变换到d-q旋转坐标系,根据图2所示的各坐标系之间的关系,可得变换方程:
(2)
式(1)、(2)中,f代表电机的电压、电流或磁链等变量的各轴分量.
1.2 PMSM数学模型
经过坐标变换,PMSM 在与转子同步旋转的d-q坐标系下的数学模型[15]如下.
定子电压方程为:
(3)
定子磁链方程为:
λq=Lqiq,λd=Ldid+Φm
(4)
将式(4)代入式(3),得:
(5)
其中:vd、vq分别是定子在d轴和q轴的电压分量;id、iq分别是定子在d轴和q轴的电流分量;r是定子电阻;λd、λq分别是定子在d轴和q轴的磁链分量;ωe为电角速度;Ld、Lq分别是在d轴和q轴的电感分量;Φm为永磁体磁链.
如果此时q轴和d轴实现完全解耦,则电磁转矩方程:
(6)
当id=0时,式(6)变为:
(7)
由式(7)可以看出,在实现完全解耦的前提下,当id=0时,电磁转矩只与iq有关.通过坐标变化,使交流电机复杂的电磁转矩关系转变为简单的直流电机电磁转矩模型.但从式(5)可见,在同步坐标系下,两个坐标轴上的电压相互耦合,电流id在q轴上产生的耦合电动势为ωeLdid,电流iq在d轴产生耦合电动势为-ωeLqiq.进一步,当ωe增大时,耦合电动势在式(5)中所占的比例也相应增大,会造成高速时给电流环带来额外的负担,严重时甚至使电流环不稳定[16].
2 改进的PR控制器
目前,有多种电压解耦策略是通过在矢量控制中对电流环的PI控制器进行控制调节的,如电流前馈解耦、交叉解耦和电流偏差解耦[17].虽然基于PI控制器的矢量控制技术能够很好地实现电机解耦控制,但是电流前馈解耦对参数十分敏感,交叉解耦在低速时解耦的效果较差,电流偏差解耦计算量大且结构复杂[18].为解决这些问题,通过改进的PR控制器,实现一种在静止坐标系下的电流矢量控制策略.
2.1 改进的PR控制器控制原理
比例谐振控制器,简称PR控制器,该控制器是通过比例和谐振两个环节实现系统控制.PR控制器可对交流信号实现无静差控制与跟踪[19].
理想的PR控制器传递函数[20]:
(8)
理想的PR控制器,虽然在谐振频率点处有高增益,但是频带很窄,在非谐振频率点处增益低,频带宽,这使得PR控制器很难抑制大部分处在非谐振频率点处的干扰信号,在实际系统应用中不利于系统的稳定性.为了提高系统的稳定性,采用改进的PR控制器.改进的PR传递函数:
(9)
其中:ω0为谐振频率;Kp为比例增益;Ki为积分增益;ωc为截止频率.
在设计中,谐振频率与电机转速一致.因此,从式(9)中可以看出,控制器中有3个参数,ωc,Kp,Ki.假设其中两个参数不变,改变第三个参数,通过博德图来分析三个参数分别对系统性能的影响.博德图如图3所示.
通过图3分析可知,当Kp增大,在基频处以外的幅值随之增大,而基频处的幅值虽然也有所增大,但是增大的幅度并不是十分明显,表明Kp太大后对谐振的影响并不大;ωc决定系统的带宽,ωc越小系统的频带越窄,对信号具有良好的选择性;Ki起消除稳态误差的作用,随着Ki的增大,基波频率处增益增大,但是同时系统频带范围变大,使无用的信号被放大,不利于系统的稳定.所以选择改进比例谐振参数,应调节Ki来减少系统的稳态误差,同时调节ωc来选择有用信号,抑制频率波动带来的误差影响.
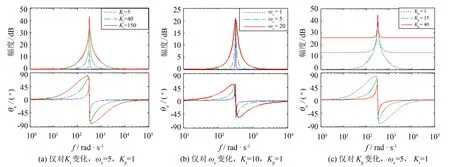
图3 分别改变PR三个参数的伯德图Fig.3 Bode map that changes the three parameters of PR, respectively
2.2 改进的PR控制器在PMSM上的实现
使用改进的PR控制器代替传统PMSM电流环的PI控制器,设计了一种在静止坐标系下PMSM控制策略,其系统框图如图4所示.
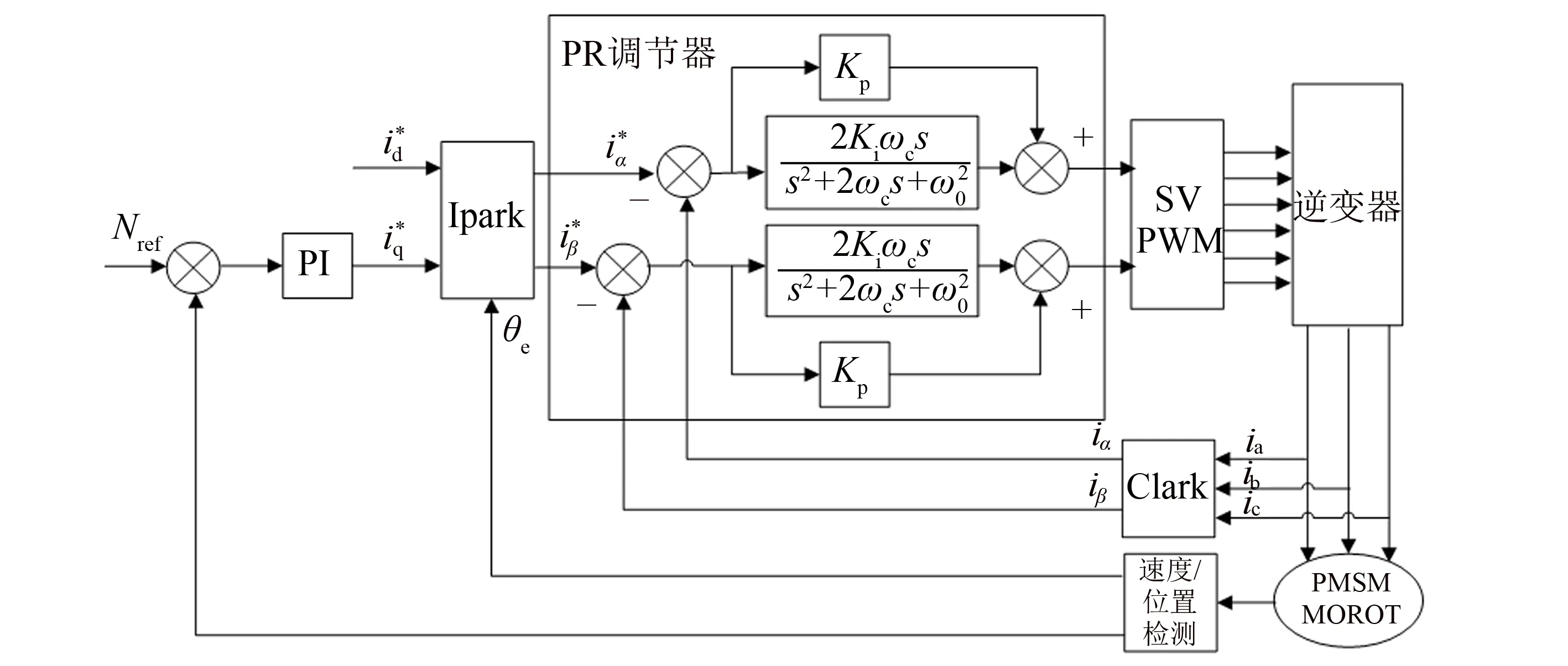
图4 静止坐标系下基于改进PR控制器的PMSM矢量控制图Fig.4 PMSM vector control based on improved PR regulator in stationary coordinate
用数字控制器实现该控制策略时,为避免频率混叠效应,采用双线性变换法对式(9)进行离散化处理.变换公式为:
(10)
将式(10)代入式(9),得:
(11)

整理后,得差分方程:
y(k)=y1(k)+y2(k)
(12)
其中:
y1(k)=b0x(k)-b0x(k-2)-a1y1(k-1)-a2y1(k-2)
(13)
y2(k)=Kpx(k)
(14)
式(12)实现了对误差信号的稳态控制,相比于传统的PI控制器解耦反馈控制,PR控制器控制简单,易于实现.
3 仿真与实验
为验证所设计基于改进PR控制器的PMSM矢量控制效果,根据图4所示的静止坐标系下基于改进PR控制器的PMSM矢量控制框图,在Matlab/Simulink环境下搭建仿真模型,如图5所示.
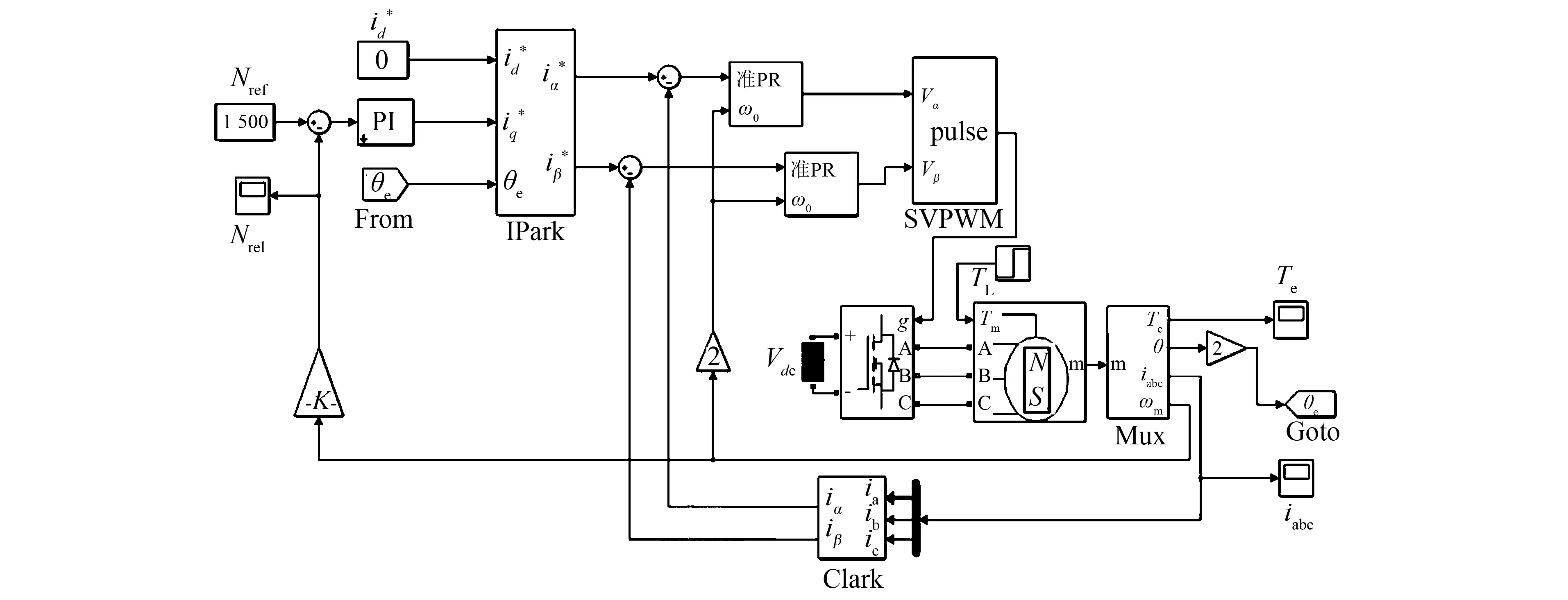
图5 Matlab/Simulink环境下基于改进PR搭建系统仿真模型Fig.5 System simulation model based on improved PR in Matlab/Simulink environment
同时,为便于比较,根据文[1]在Matlab/Simulink环境下搭建基于PI控制器的系统仿真模型(近似文[1]的图6).
① 仿真电机参数.电机极对数2,定子电感Lq和Ld均为6×10-3H,转动惯量为0.001 2 kg·m2,永磁磁通0.182 7 Wb,定子电阻0.6 Ω.
② 仿真条件.仿真时间0.4 s,采样周期1×10-6s ,参考转速1 500 r·min-1,初始时刻负载转矩TL=0 N·m,在t=0.2 s时负载转矩TL=10 N·m.
③ 控制器参数选择.在图6所示的基于PI控制器搭建的系统仿真模型中,通过内模控制策略,对交叉耦合电动势进行解耦,可以得到PI控制器参数满足如下关系[21]:
(15)
其中:α为调节参数,与系统响应时间有关,受电机的时间常数限制;τ为电机的时间常数;R为定子电阻;Ld、Lq分别是在d轴和q轴的电感分量.

图6 仿真转速变化曲线Fig.6 Simulation speed transformation curve
在实际控制过程中,系统的响应时间受电机的时间参数限制,在PMSM中,电机的时间参数为:
(16)
根据仿真电机参数和式(15)、(16),当电流环PI控制器参数为Kp=4,Ki=375时,基于PI控制器的PMSM矢量控制对该仿真电机控制性能较好.为便于比较两种控制器的控制性能,设定改进的PR控制器参数与PI控制器的参数一致,均为Kp=4,Ki=375,ωc=10.改进PR控制器的PMSM矢量控制仿真的转速如图6所示.
基于改进PR控制器的PMSM矢量控制仿真静止坐标下的α和β电流如图7所示.

图7 静止坐标系下的电流情况Fig.7 Current situation in a stationary coordinate system
为对比基于PI控制器的PMSM矢量控制,所用PI仿真模型中的速度环和电流环的增益参数和电机参数与基于改进PR控制器仿真矢量控制条件一致,二者仿真的转速结果,如图8所示.
从仿真结果可以看到,当转矩在t=0.2 s突变时,在改进的PR控制下,PMSM静止坐标系下的定子电流分量能快速响应转矩的变化,速度曲线稍有波动,但是很快恢复至设定的速度,验证了该控制策略的有效性.同时,基于PI控制器的PMSM矢量控制与基于改进PR控制器的PMSM矢量控制,二者在电机参数以及电流环和速度环增益参数一致的情况下,转速曲线基本相同,系统响应时间相近.但是,在仿真情况下,电机电感和磁链参数都为精确值,不会随时间而改变,实现完全解耦,说明基于改进PR控制器矢量控制性能与基于PI控制器的解耦矢量控制的最优性能接近.当电机转速从0转速上升到1 500 r·min-1时,基于改进的PR控制器矢量控制的电机转速超调量略小于使用基于PI控制器解耦的控制系统,且在t=0.2 s时,负载转矩从0突变为TL=10 N·m,其转速波动也小于使用传统PI控制器的控制系统.
为进一步验证所设计的基于改进PR控制器的PMSM矢量控制效果,根据图5基于改进PR搭建的仿真模型,设计和焊接了实物驱动板.驱动板处理器采用STM32F103VET6芯片,用于接收转子位置信息和定子三相电流信息来实现对应于仿真模型中的坐标变换和改进PR控制器中的算法,并且输出控制信号.驱动电路采用IR2103s芯片,逆变电路采用6个型号为75NF75的mos管构成,通过驱动电路,逆变电路和处理器输出的控制信号,实现仿真模型中的SVPWM空间矢量调制.仿真模型中转子位置信息和三相电流信息在驱动板上分别通过1 000线增量式编码器和三相电阻法采样得到.电机参数与仿真电机参数一致.实验测试数据500 μs采集一次,通过串口将电机转速和转子位置的测试数据上传到上位机.实物图如图9所示.
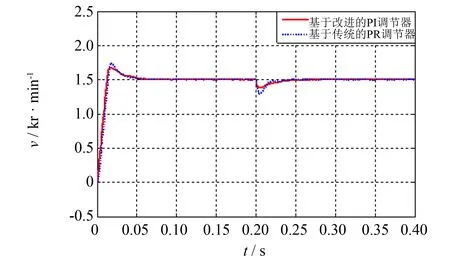
图8 仿真对比转速变换曲线Fig.8 Simulation and contrast speed transformation curve

图9 实物连接图Fig.9 Connection material object
电机运行过程中PR控制器控制下转子位置如图10(a)所示,实际转子位置与理论位置对比情况如图10(b)所示,其中理论位置通过线性拟合得到.
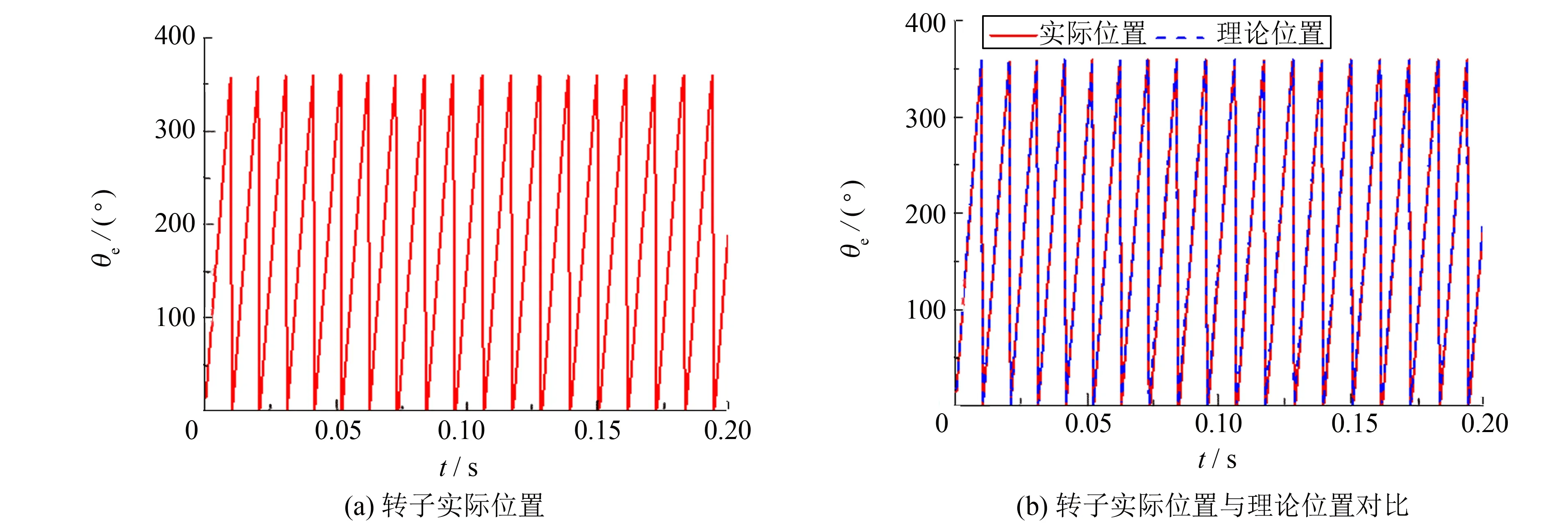
图10 转子位置情况Fig.10 Rotor position diagram

图11 实验对比转速变换曲线Fig.11 Experiment and contrast speed transformation curve
从图10可见,所设计的基于改进PR控制器的PMSM矢量控制的转子位置与理论转子位置曲线几乎重合.说明电机在运行过程中较为稳定,验证了该改进的PR控制器在PMSM矢量控制上的有效性.
进一步地,通过实验比较了PI控制器与改进PR控制器的PMSM矢量控制,实验条件为转速从0加速至1 500 r·min-1再减速到0时电机的转速情况, 如图11所示.从图11可见,两种控制方法所得的转速曲线相近,系统响应时间基本相同.但是在转速从0加速至1 500 r·min-1时,改进PR控制器的PMSM矢量控制转速超调量略小于改进PI控制器的PMSM矢量控制,且转速波动量小.
4 结语
将改进的PR控制器应用到PMSM矢量控制中,利用双线性变换法对控制器进行离散化处理.通过实验得到转子的位置、转速情况和仿真得到的转速情况以及静止坐标系下的电流情况, 验证了该矢量控制的有效性.与传统的PI解耦控制对比,两种控制器实验和仿真的转速曲线基本相同,说明两种控制器在PMSM上的控制性能相似.但是相比于PI控制器,通过改进的PR控制器设计的PMSM控制系统结构简单,不需要精确地估计电机参数,无需补偿解耦项,避免了PI控制器下复杂的多次旋转坐标计算,易于实现,且控制性能好.
