稳定与非稳定状态下负重与肌肉活性关系模型的构建与实证
2019-01-23董德朋
董德朋, 袁 雷
(1.吉林大学 哲学社会学院,吉林 长春 130012;2.吉林大学 体育学院,吉林 长春 130012)
针对“负重与人体肌肉活性之间的关系是一种线性关系(直线),还是非线性关系(非直线)”这一问题,似乎并无一致性结论。有的学者认为它们是一种线性关系[4-5];而有的学者认为它们是一种非线性关系[6]。因此,针对负重与人体肌肉活性之间的关系问题还需要进一步明确,而在稳定与非稳定状态下是否依然保持某一种关系特征,也有待于进一步探讨。鉴于此,本文通过设计人体在稳定与非稳定状态下不同负重的保加利亚式杠铃分腿深蹲肌肉肌电测试(简称“深蹲”,该深蹲形式能够在减少大负荷深蹲对脊柱造成压力的同时,还能够提高腿部肌肉的负荷与稳定性,有利于受试者对脊柱的保护和优化测试效果,从而便于后续分析与检验),以进一步认清这一学理现象,为今后的研究提供理论依据与借鉴。
1 研究对象与方法
1.1研究对象研究选取近3年内一直坚持训练的体育院校田径队运动员为测试对象,且其1年内无骨折、急性伤病,能够规范地完成深蹲动作,并自愿签署实验协议。基于以上标准,本文共确定了30名田径运动员(2名健将、10名一级运动员、18名二级运动员),随机分为2组。其中关系模型构建组(负重:0%RM、30%RM、60%RM及90%RM)包括20名运动员,其年龄为(19.901.80)岁,体质量为(68.858.50)kg,身高为(178.804.70)cm。关系模型检验组(负重:0%RM、25%RM以及50%RM)包括10名运动员,其年龄为(20.102.05)岁,体质量为(70.109.03)kg,身高为(180.155.20)cm。通过独立样本t检验,2组之间无显著性差异(P>0.05),可以认为是同一受试群体。研究选取11块肌肉进行肌电测试:竖脊肌(ES)、股外侧肌(VL)、臀大肌(GMa)、腓肠肌(GM)、臀中肌(GMe)、股直肌(RF)、股二头肌(BF)、腓骨长肌(PL)、股内侧肌(VM)、胫骨前肌(TA)以及比目鱼肌(SO)。
1.2实验方法
1.2.1 实验设备 (1) 平衡板(JOINFIT)。为了切合运动员的实际训练,采用康复型平衡板作为非稳定支撑面(硬支撑面),其材质为板工程塑料和软底TPE,规格为47 cm×8 cm×2 cm(长×高×厚),质量为0.8 kg,颜色为蓝色。
(2) DelsysTrigno Mobile全无线GPS表面肌电测试仪(Delsys公司产)。一个Trigno检测器和16个Trigno传感器,每个传感器的EMG信号分辨率为16 bit,采样率为4 kHz。
(3) Vicon三维运动捕捉分析系统。为了便于后续的周期划分,本文主要对膝关节数据进行实时采集。
(4) 其他。包括节拍器(1s)、Polar心率表、杠铃片、杠铃杆、脱脂棉、笔记本电脑、跳箱(50 cm)等辅助设备。
首先是移就修辞格的使用。“思念瘦”将本来形容人体态变化的词语用来形容虚无缥缈、无法形容的“思念”。以“瘦”形容“思念”的移就,其作用在于使文句更简洁生动、使语句表达力强、给人想象的空间与人以无穷诗意。
1.2.2 实验步骤 首先对受试者在正式实验前2周进行最大力量测试,其测试原理依据Mccaw等[7]的推荐方法[(0.033×重复次数)×质量]+质量,结合重复次数与最大力量关系(阻力-次数:100%-1,95%-2~ 3,90%-5~ 6,85%-7~ 8,80%-10~ 12,75%-12~ 16)[8],对受试者测试结果进行最大力量均值计算。2周后,又对受试者进行了人体深蹲肌肉肌电测试,其最大力量测试和深蹲肌电测试步骤见表1。通过最大力量计算原理,获得最大力量的负重为77.583 kg(稳定)和67.716 kg(非稳定)。根据负重百分比的计算结果及研究需要,设定稳定状态下的25%RM、30%RM、50%RM、60%RM及90%RM的负重分别为20、25、40、45、70 kg,非稳定状态下分别为15、20、35、40、60 kg。

表1 受试者深蹲时肌肉的最大力量、肌电测试步骤
1.2.3 数据处理 采用EMGworks Analysis软件将肌电数据进行处理,其中包括滤波(Butterworth带通滤波器,10~400 Hz)与整流处理(全波)等。同时,根据Vicon三维运动捕捉分析系统对膝关节角度的采集进行周期划分,结合EMGworks Analysis软件获得肌肉RMS值。RMS为均方根振幅,它与肌肉运动单位募集数量及肌纤维放电的同步化有关,因此通常用来评估肌肉活性[11]。采用SPSS 16.0软件对各状态下的RMS值进行统计,为了减少个体之间的差异,以稳定状态下徒手时的各肌肉RMS值为基准,对其他状态进行标准化处理[12]。由于本文采用比值表示相对数,因此,文中相对RMS值无量标。
2 稳定与非稳定状态下不同负重时肌肉肌电测试结果
由表2可见2个重要结果:①稳定与非稳定状态下的人体肌肉活性均随着负重的提升而显著提高(P<0.05,P<0.01,P<0.001),即负重更高者对肌肉的刺激更大,这一结论验证了以往大多数学者的观
点[1-3,13-15];②稳定与非稳定状态在不同负重时对肌肉活性的刺激程度存在一定差异。在0%RM时,非稳定条件刺激了更多的肌肉,除GMa、RF、VM、VL外,均表现为非稳定状态对肌肉刺激更强,这一点与洪扬等[1]的研究存在一定出入,究其原因,这不仅与负重、支撑面质地有关,还与受试者的动作类型(以往研究为杠铃深蹲,本文为保加利亚单腿蹲等)有关,文献[16-18]中的研究也能够佐证这一观点。在30%RM时,稳定与非稳定状态均存在各自的优势,这进一步验证了袁雷等[19]、董德朋等[20](软支撑:平衡盘)的研究结果。当负重提升到60%RM、90%RM时,稳定与非稳定状态对肌肉刺激效果之间的差异逐步缩减,表现为无显著性(P>0.05),Willardson等[3]的研究也佐证了这一结论。
综上可知,本文在证明随着负重的提升人体肌肉活性也显著性提高这一观点的基础上,进一步发现,随着负重的提升,负重对肌肉的刺激效果将逐渐掩盖非稳定因素产生的效果。

表2 人体在稳定与非稳定状态下不同负重时肌肉相对RMS测试结果
注:相同负重在稳定与非稳定状态下的比较存在显著性差异,*表示P<0.05, **表示P<0.01,***表示P<0.001;相邻的低负重与高负重比较存在显著性差异,#表示P<0.05,##表示P<0.01,###表示P<0.001;相邻的低负重与高负重比较存在显著性差异,※表示P<0.05,※※表示P<0.01,※※※表示P<0.001;0%RM与90%RM比较存在显著性差异,+表示P<0.001
3 稳定与非稳定状态下负重与肌肉活性关系模型的构建
探讨稳定与非稳定状态下负重与人体肌肉活性的关系性问题,首先需要明确稳定-非稳定、负重是否与人体肌肉活性存在相关关系,这需要有统计学结果的支持。从表3可知,各状态下的负重均与人体肌肉相对RMS值和存在显著性相关(r=0.700,P<0.001;r=0.821,P<0.001;r=0.773,P<0.001)。在稳定-非稳定与人体肌肉相对RMS值和的相关分析中发现,仅在0%RM状态时存在相关(r=0.562,P=0.014)。由此可知,负重与人体肌肉存在显著的正相关关系,并不受稳定-非稳定因素的影响,而稳定-非稳定与人体肌肉相对RMS之间的相关关系受负重的影响,且这种关系的变化主要是由于负重的提升所致。

表3 不同状态与人体肌肉相对RMS值和的相关分析结果
为进一步明确负重与肌肉活性之间的整体关系特征,对稳定与非稳定状态下不同负重的人体肌肉相对RMS值和以及从0%RM→30%RM→60%RM→90%RM提升百分比进行统计,结果见表4。从表4可知,除0%RM负重时稳定与非稳定状态对人体肌肉产生的刺激具有显著性差异外(P=0.008),其他负重下均未表现出显著性差异(P>0.05)。随着负重的提升相对RMS值提升百分比的统计结果看,随着负重的提升,人体肌肉RMS表现出从小幅度提升到大幅度提升再到小幅度提升的转化特点。这一结果与Chaffin等[21]的研究存在相似之处,他们的研究结果也认为随着负重的提升,人体肌肉活性提高,且提升速度逐渐加快。人体的负重与肌肉活性关系需要面对自身极限问题,就像Petrofsky[22]的实验研究所得结果那样,人体肌肉RMS值随着负重的提高而提升,但当达到70%最大肌力时,提升幅度逐渐减小。这一研究从侧面表明了在一定时间范围内随着负重提高到某一极限时,人体所表现出来的肌肉活性也将趋向某一极值(受自身条件限制)。本文也进一步验证了Chaffin等[21]与Petrofsky[22]等的综合结论。

表4 人体在稳定与非稳定状态下不同负重时肌肉相对RMS值及提升百分比
基于以上研究结果,负重与人体肌肉活性的关系模型应包括如下特征:①负重与人体肌肉活性的关系表现为一种正相关关系;②负重与人体肌肉活性的正相关关系并不受稳定-非稳定因素的影响,但稳定-非稳定因素与人体肌肉活性关系受到负重因素的干扰;③随着负重的提升,负重成为影响人体肌肉活性的主要因素;④随着负重的提升,人体肌肉活性表现出从小幅度提升到大幅度提升再到小幅度提升的转化特点;⑤当负重提高到某一极限时,人体所表现出来的肌肉活性也将趋向某一极值。基于以上认识,本文绘制了稳定-非稳定状态下负重与肌肉活性的关系模型图(图1)。图1显示,随着负重的提高,人体肌肉活性存在从缓慢提升到快速提升阶段,这一点与Chaffin等[21]的研究不谋而合。同时,研究还认为,随着负重的进一步提升,肌肉活性还存在从快速提升再到缓慢提高阶段,这一点也进一步验证了Petrofsky等[22]的研究结论。因此,笔者认为,稳定与非稳定状态下负重与人体肌肉活性的关系可能表现为一种S型曲线模型。S型曲线中的Logistic函数最为符合这一曲线特征,即:发生阶段速度较为缓慢,发展阶段速度加快,而在成熟阶段,出于自身或环境的制约,逐渐趋于一种稳定状态[23]。
需要进一步说明的是,稳定与非稳定状态下的负重与肌肉活性的S型曲线关系将受到许多因素的影响,从而表现出一定差异。这些因素既包括反映外在“特征形式”的平衡面质地[1,24-25]、动作形式[1,19]等,又包括反映内在“生物学”因素的肌纤维类型配比、疲劳程度等[26]。如就肌纤维配比而言,低负重时,ST纤维参与活动较多,高负重时,FT纤维的参与活动较多,高、低负重与肌肉活性表现出线性关系;而中负重时,ST与FT纤维比例相当,负重与肌肉活性表现出非线性关系[26]。无论如何,从目前的研究经验结合本文的研究结果看,低负重时尽管受到这些因素的影响,但随着负重的提升,负重逐渐成为影响肌肉效果的主要因素,这一转变从本文所构建的模型图的上横坐标中可以体现。因此,笔者认为,人体在稳定与非稳定状态下负重与肌肉活性之间可能存在一种S型曲线关系模型(与Logistic函数相似),这种模型受多种因素的影响,且随着负重的提升,存在“主导因素”的转化。
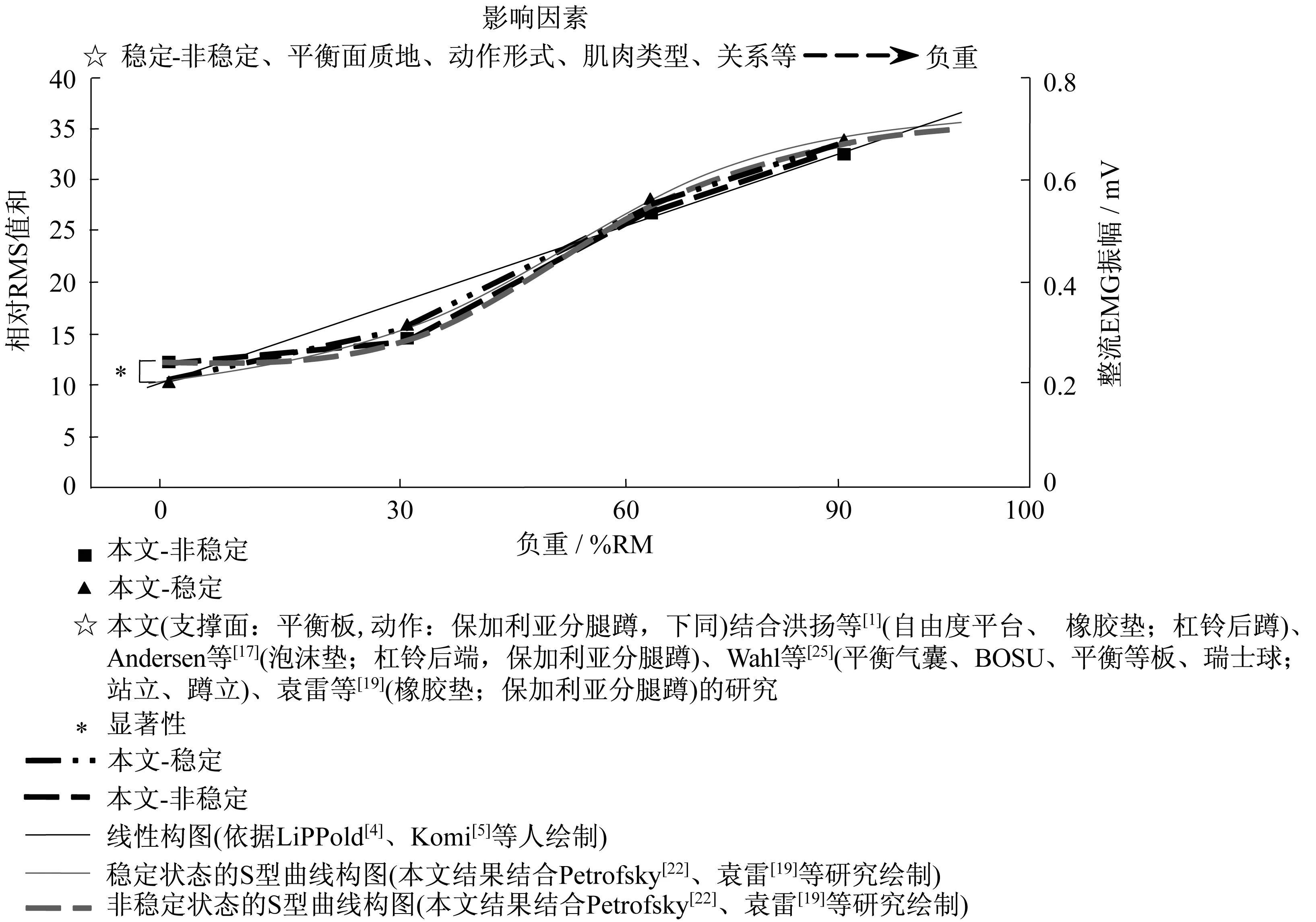
图1 稳定-非稳定状态下负重与肌肉活性的关系模型Figure 1 The relationship model of load and muscle RMS value under stable and unstable states
4 稳定与非稳定状态下负重与肌肉活性关系模型的实证
4.1稳定与非稳定状态下负重与肌肉活性关系模型的拟合基于以上分析,本文初步认为人体在稳定与非稳定状态下负重与人体肌肉活性的关系存在S型曲线关系,并非仅是一种简单的线性关系。为了验证这一观点,进一步对数据进行了线性及Logistic模型(S型曲线)拟合分析(包括:稳定状态下的线性,简称SL;非稳定状态下的线性,简称UL;综合线性,简称GL;稳定状态下的S型,简称SS;非稳定状态下的S型,简称US;综合S型,简称GS)。其中,在进行Logistic模型拟合前,需要根据Logistic公式:
式中:
y=K/(1+Ae-Bx)
(1)
(2)
A=a0·K
(3)
B=lna1
(4)
由式(2)可确定SPSS拟合Logistic模型时录入的上限值;式(2)、(3)中的a0为常数项、a1为系数项,可从SPSS分析报表中获得,从而形成Logistic函数[27]。
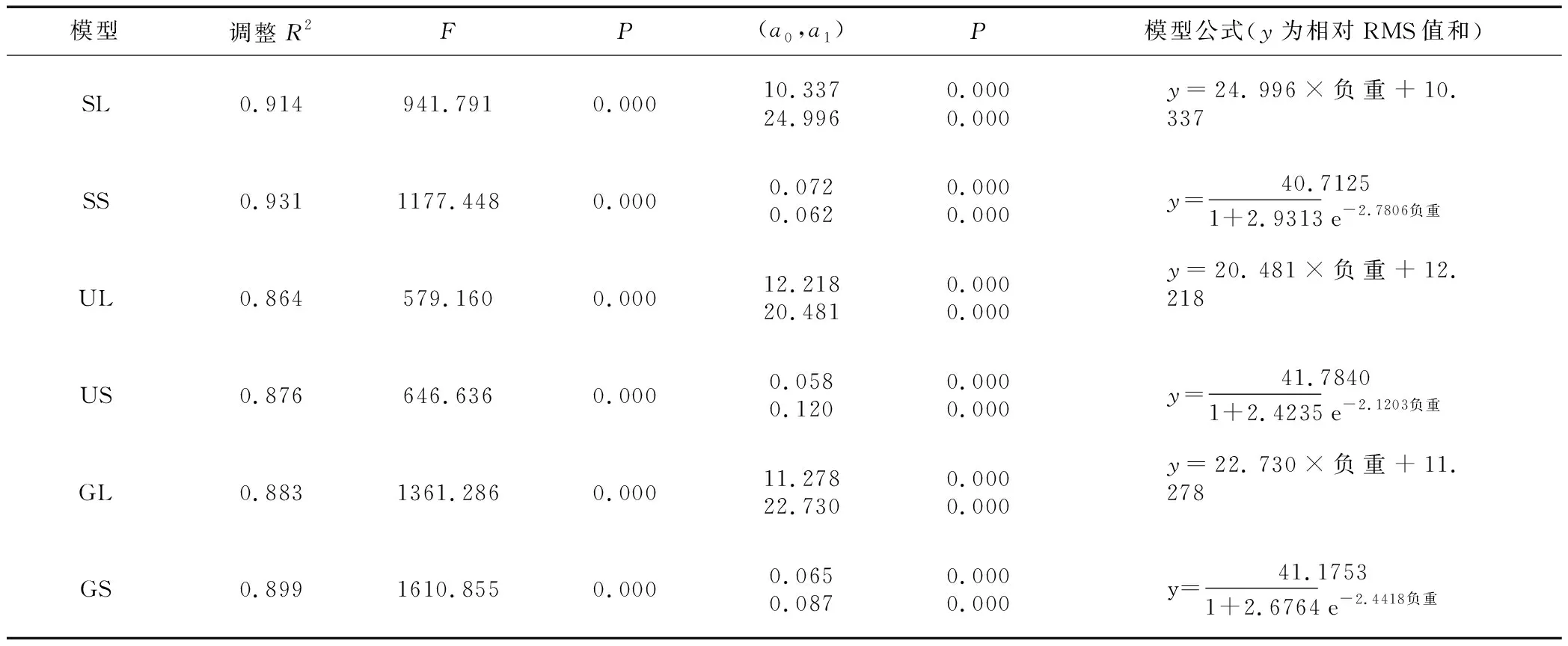
基于以上原理,本文对数据进行了统计分析,结果见表5。从拟合结果可知,线性拟合和S型曲线拟合均符合拟合要求,但无论是SL拟合(调整R2=0.914)与SS拟合(调整R2=0.931)比较,UL拟合(调整R2=0.864)与US拟合(调整R2=0.876)比较,还是GL(调整R2=0.883)与GS拟合(调整R2=0.899)比较,均表现为S型模型的拟合度高于线性模型拟合度。因此,尽管线性拟合指标也在合理范围之内,但稳定与非稳定状态下的负重与肌肉活性关系其实更加符合一种S型非线性曲线关系。这一结论不仅验证了LiPPold[4]、Komi[5]等的线性观点,也证实了Vredenbregt等[6]、袁雷等[19]的非线性观点。本文对以往研究的弥补在于证实了稳定与非稳定状态下的负重与人体肌肉活性其实更加符合一种S型非线性曲线关系,且这种关系并非简单的仅受外在“特征形式”因素的影响,也应受内在“生物学”因素的干预,并随着负重的提升,存在“主导因素”的转化。
表5稳定与非稳定状态下不同负重与肌肉活性的关系模型拟合结果
Table5Fittingresultsoftherelationshipbetweendifferentloadingandhumanbodymusclesactivityunderstableandunstablestates
模型调整R2FP(a0,a1)P模型公式(y为相对RMS值和)SL0.914941.7910.00010.33724.9960.0000.000y=24.996×负重+10.337SS0.9311177.4480.0000.0720.0620.0000.000y=40.71251+2.9313e-2.7806负重UL0.864579.1600.00012.21820.4810.0000.000y=20.481×负重+12.218US0.876646.6360.0000.0580.1200.0000.000y=41.78401+2.4235e-2.1203负重GL0.8831361.2860.00011.27822.7300.0000.000y=22.730×负重+11.278GS0.8991610.8550.0000.0650.0870.0000.000y=41.17531+2.6764e-2.4418负重
4.2稳定与非稳定状态下负重与肌肉活性关系模型的检验为进一步检验这一关系模型,采用同样的方案测量了10名田径运动员(同样的测试流程,对受试者进行了稳定与非稳定状态下0%RM 、25%RM与50%RM负重时相同肌肉肌电测试),将样本进行配对样本t检验,结果各指标均无显著性差异(P>0.05),可以认为为同一类群体。根据同样的数据处理与计算方案,得到每名预测样本在稳定与非稳定状态下0%RM、 25%RM以及50%RM时的肌肉实际相对RMS值和。同时,根据测试负重,将数据带入SL、UL、GL、SS、US以及GS公式,对人体肌肉相对RMS值和进行了预测,并将预测值录入SPSS16.0,采用配对样本t检验方法进一步将其与实际值进行了显著性检验,结果见表6。
从表6可知,SL、UL以及GL模型在25%RM时的预测值与实际值比较中均存在显著性差异(P=0.039,P=0.008,P=0.030),出现了高估现象。这一现象出现的主要原因可能与“生物学”因素有关,即:较低负重时,慢肌运动单位动员较多,其肌电主要反映了慢肌活性;而在较高负重以上时,快肌运动单位动员较多,其肌电主要反应了快肌的活性。因而,反应单一肌肉类型有利于线性模型的预测[26]。当在较低与较高负重的中间阶段,其快肌和慢肌运动单位均为主要动员肌群,从而线性关系降低,致使线性模型对其的预测度下降。S型模型似乎能够较好地弥补这一缺陷,在S型曲线模型的预测中,仅非稳定S型曲线(US)模型在25%RM时的预测值与实际值存在显著性差异(P=0.037),且综合S型模型(GS)在25%RM时的预测值与实际值存在临界差异性(P=0.063),而其他模型在各负重时的预测值与实际值的比较中均未出现显著性差异(P>0.05)。因此,综合S型模型(GS)能够在一定程度上提高非稳定S型(US)模型在25%RM时负重对肌肉活性的预测能力,但这将降低稳定S型模型(SS)在25%RM时负重对人体肌肉活性的预测准确性。
表6不同模型的相对RMS值和的预测值与实际值比较结果
Table6Resultsofcomparisonofpredictedvaluesandactualvaluesofdifferentmodels

注:实际值与预测值比较,*表示P<0.05,**表示P<0.01
由此可知,尽管线性模型能够在一定程度上预测人体在稳定与非稳定状态下负重对人体肌肉活性的刺激程度,但容易出现高估现象,而S型曲线模型能对其做出较好的弥补。同时,需要指出的是,尽管综合S型曲线能够在一定程度上权衡稳定与非稳定S型曲线的预判能力,但这将会降低稳定S型曲线模型的预判精确度。
5 结论
(1) 人体在稳定与非稳定状态下负重与肌肉活性的关系既存在线性关系(模型-调整R2:SL-0.914;UL-0.864;GL-0.883),也存在曲线关系(模型-调整R2:SS-0.931;US-0.876;GS-0.899),且它们之间更符合一种S型曲线关系模型。
(2) 稳定与非稳定状态下的这种S型曲线模型将受到许多因素的影响,既包括外在的“特征形式”,又包括内在的“生物学”因素,且随着负重的提升,负重将成为主导这一S型曲线关系模型形成的主要因素,即存在“主导因素”的转化。无论如何,未来的研究应从这2个方面实现双向发力,共同构建负重与人体肌肉活性的关系体系。
(3) 通过实证线性与S型曲线关系模型发现,线性模型在预测负重对人体肌肉活性的刺激程度时,容易出现高估现象,而S型曲线模型能够较好地对这一缺陷进行弥补。同时,综合S型曲线能够在一定程度上权衡稳定与非稳定S型曲线的预测能力,但这将降低稳定S型曲线模型的预判精确度。
