贵阳新一代天气雷达(CINRAD/CD)交流伺服系统的故障分析与处理
2019-01-18雷登林
雷登林,钟 健,田 程
(贵州省贵阳市气象局,贵州 贵阳 550001)
1 引言
贵阳新一代天气雷达作为第一部组网建设的CD型雷达,于2013年8月进行大修,对雷达的部分分系统进行了优化提升,使雷达系统在稳定性方面有了较大提高。尤其是伺服系统技术状态改变较大,由之前的直流伺服系统改为交流伺服系统。直流伺服系统的直流电机运行寿命短,电机碳刷易于磨损须常常清洗及更换,天线运行速度不稳定;而交流伺服系统则具有交流电机免维护,天线到位精度较高,稳定性好等优点。但近年在运行中也出现了一些问题,本文将解决这些问题的过程进行归纳总结,从工作原理入手进行分析,并查找出判断导致故障的原因。以期今后大修升级的组网CD型雷达站保障人员面对全新的伺服系统故障时能有所启发。
2 伺服系统的组成及工作原理
2.1 伺服系统的组成
伺服系统由方位伺服和俯仰伺服两部分组成,共用一个伺服分机,方位与俯仰均由驱动分机、执行电机(B-202B-31型交流伺服电机)、减速器、主发送器等器件组成,实现对方位角及仰角的控制。伺服分机由伺服控制器、电源变压器、控制继电器、控制开关和手动电位器等组成。驱动分机主要由方位驱动器、俯仰驱动器、接触器、保险丝、控制开关等组成。
2.2 伺服系统的工作原理
天线方位伺服系统与天线俯仰伺服系统是全数字连续控制的伺服跟踪系统,它是以一定精度实现主控作用的自动装置,图1为角码跟踪系统简略方框图。
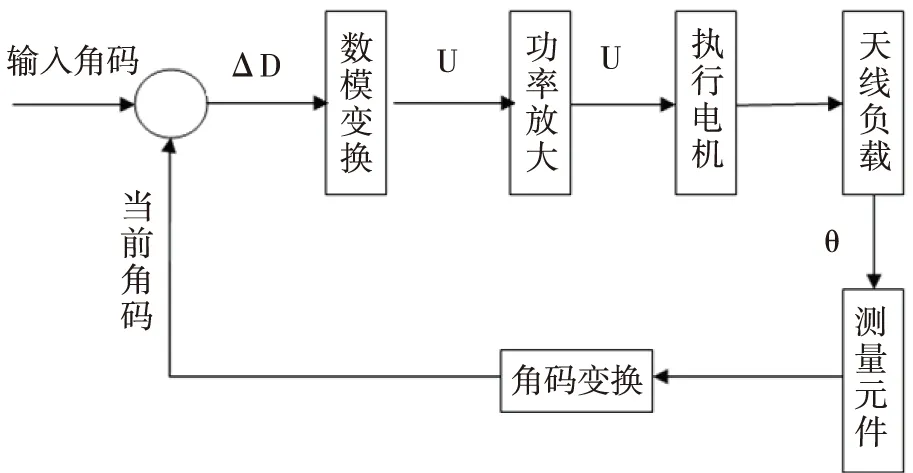
图1 角码跟踪系统框图Fig.1 Frame diagram of the corner code tracking system
天线控制系统的工作流程是控制终端给定一个天线的位置(输入角码),通过伺服系统来控制天线的位置,测量元件及角码变换器获得当前角码后,再与输入角码联系起来加以比较,相符合时系统处于静止状态,不符合时就产生一个角码误差(±ΔD),此误差经数模变换为误差电压U,再经驱动器功率放大后,作用在执行电机上,使其朝减小误差的方向运动,因此,天线就能连续跟踪着控制终端的命令运转。
3 伺服系统的故障及处理
3.1 因汇流环浸油、导线接触不良导致的天线异常抖动
2013年10月31日15时雷达出现如下异常现象:天线抬升仰角时,出现抖动,天线每转两圈会在方位260°附近在垂直方向上剧烈抖动,导致完成体扫的时间增加,甚至有时不能完成体扫。
异常现象的排除过程:手摇天线时,天线角码与误差电压均在260°左右摆动,但此时天线不抖动,在260°出问题都在天线方位运转720°时(因天线转2圈,汇流环内环转1圈)。更换伺服驱动单元印制板(方位与俯仰),异常现象仍存在,问题未解决;检查天线装置内部,发现中心有油滴沿电缆往下流,汇流环表面与外侧有油痕,将汇流环清洗后,异常未能排除;用兆欧表测试俯仰电机的驱动环、同步机信号、反馈环的绝缘度均正常;用万用表检查同步机信号线的连接情况时,发现同步机信号线汇流环到俯仰箱段的D1信号线有中断现象,对存在连接不良的D1信号线重新焊接处理,检查连接良好后,紧固天线座内的所有线缆插头,理顺、擦干所有电缆上的油痕。雷达开机运行,天线异常排除,雷达恢复正常。
故障原因 :汇流环内进油,导致碳刷与汇流环之间的绝缘度降低,并且汇流环到俯仰箱段的D1信号的导线接触不良,影响了同步机信号,致使天线抖动。
3.2 伺服系统驱动器故障的分析与处理
伺服系统的驱动器故障出现了两次,一次是2017年9月28日出现的俯仰驱动器故障,另一次是2018年3月1日出现的方位驱动器故障。
3.2.1 俯仰驱动器损坏导致的“俯仰故障” 2017年9月28日09时40分,雷达监控系统报“俯仰故障”, 天线在水平方向上能环扫,俯仰不能动作。在实时处理显示终端用“故障复位”未能使雷达恢复正常,初步判断俯仰故障为硬件出现损坏导致。
故障排除过程:
①检查伺服系统的驱动分机,发现驱动分机内方位驱动器的LED指示灯亮,而俯仰驱动器LED指示灯未亮,用方位驱动器来对比检查俯仰驱动器的工作电压,发现俯仰驱动器输入电压正常,初步判断俯仰驱动器坏。
②在未作任何改变的情况下,用备份驱动器更换损坏的俯仰驱动器,驱动器LED指示灯亮。俯仰驱动器工作状态正常,但天线在仰角上仍不能动作,故障未排除。检查俯仰驱动器参数设置及工作状态,利用驱动分机内方位与俯仰两部分在器件组成、功能应用等基本相同的条件下,可用组件替代的方法查找、排除故障。即用驱动分机内的俯仰驱动器组件代替方位驱动器组件后,天线方位能动作,说明俯仰驱动器正常,问题应出现在驱动器的信号前端。
③继续查找故障原因,检查伺服分机,未发现伺服分机的俯仰部分有异常,进一步检查分析,推测数据采集分机内的俯仰伺服驱动单元可能有异常(伺服驱动单元外观、指示灯等未发现有异常),更换上站内备份的俯仰伺服驱动单元,开机启动天线,命令仰角,天线能抬升,但仰角存在较大的追摆、控制精度也不够。
④在调整天线控制精度的过程中,出现天线俯仰冲顶的情况,天线冲顶后随之发现命令仰角失效,用人力把天线定位到0°后,发现天线显示仰角与实际仰角不一致,仰角相差很大,再次命令仰角,仰角不再动作,判断天线冲顶反馈回来的过大电流信号再次烧坏俯仰驱动器。
⑤继续分析查找天线调整中出现的俯仰故障,发现手摇天线做俯仰,顺时针摇动,仰角显示为0°时,仰角显示数字不能继续向上,观察天线转动视频监控,发现天线向下降;逆时针摇动,仰角显示为负值,角码且继续减小,观察天线转动视频监控,发现天线向上抬升。正常情况下,手摇俯仰顺时针转动,角码显示增大,天线抬升;逆时针转动,角码显示减小,天线下沉。判断驱动器或俯仰伺服驱动单元的设置不正确,导致俯仰反向而行。检查后发现:俯仰伺服驱动单元上控制相序的跳线连接不对, JP1应为(从左到右:1、4、5、7、8短接)、JP2应为(从左到右:1、3短接)。跳线短接不对,会导致俯仰角码与控制状态不对,控制相序、时序也不正确,导致天线发生冲顶现象。经重新调整伺服驱动单元的跳线后,更换上新的俯仰驱动器(CR06550)后(更换后须新写入数据),角码与状态等均回归正常,故障排除。
3.2.2 方位驱动器损坏导致的“方位故障” 2018年3月1日09时雷达监控系统报天线“方位故障”,故障表现为天线在水平方向上不能转动,因有了2017年9月28日解决俯仰驱动器故障的经验,所以能快速推断故障源大致出现在哪里,但还是按照常规检查故障的流程排查故障,虽然可能多耽搁几分钟,但这样能清楚、全面、无遗漏地排查故障。下面是“方位故障”的排除过程:
①在实时显示终端对故障作复位处理,故障不能排除。
②进入天线罩,关断天线安全开关,查看天线,并人力推动天线在水平方向上转动,感受天线水平方向上的阻力较轻,粗略判断方位电机正常。
③信号处理与伺服系统综合柜,拉出伺服系统驱动分机机框,查看驱动器工作状态:方位驱动器外壳温度无异常;驱动器风扇工作正常;LED数码管显示为“8点”,驱动器工作正常时LED数码管显示应为“1点”,判断驱动器出现问题。对伺服系统驱动分机关断重启,天线在水平方向上能转动十多度,就停下来,驱动器LED显示在“8点”与“1点”间快速变换,直至显示为“8点”,判断方位驱动器出现异常。
④确定方位驱动器损坏,更换上新的方位驱动器,用R232串口线(线的两端均为母头)连接数据采集机与方位驱动器, 并对更换上的驱动器写入备份的方位伺服数据,重启系统后天线方位恢复正常。
4 小结
①伺服系统的器件,因距离远、连线多、电缆长、元件多,因此任何一根导线的连接不良好、任何一个元件的损坏都可能导致故障,所以检查时要细致,并抓住重点功能器件,围绕故障原因分析查找。
②伺服系统的方位与俯仰两个子系统的结构及功能基本相同,当仅有一个子系统出现故障时可用组件替代的方法协助排查故障,可快速定位故障源,节省维修时间。
③伺服系统中天线控制精度、转速、追摆等问题时涉及到电位器的调整,系统中的可调电位器,在调节之前应记好位置如果不起作用应调到原来的位置上,再查找其他原因;更换出现故障的元器件时,应仔细检查并将换上的器件与卸下的器件的设置保持一致(如板卡跳线上的短接、驱动器内的参数设置)。
