W波段FMCW体制ISAR系统成像及试验验证
2019-01-17潘嘉祺孔令振
张 慧,王 辉,潘嘉祺,王 群,孔令振,滑 伟
(1. 北京航空航天大学 仪器科学与光电工程学院,北京 100191; 2. 上海航天技术研究院 毫米波遥感技术重点实验室,上海 201109; 3. 上海航天技术研究院 毫米波遥感技术重点实验室,北京 100081)
0 引言
毫米波因波长短,获得的图像分辨率高、电磁散射特性细节丰富等特点而成为现代雷达发展的重要趋势[1]。近几年来,随着W波段,尤其是94 GHz元器件的发展,W波段逆合成孔径雷达(ISAR)系统的研究逐渐引起各国的重视。与低波段雷达相比,利用W波段雷达获得的高分辨率ISAR图像对目标进行分类、识别,可大幅提高目标分类、识别,的准确性。此外,要获得与低波段雷达相同的分辨率,W波段ISAR系统所需的成像观测时间更短,易于获得同一目标的ISAR图像序列,而利用ISAR序列图像进行目标分类、识别同样可提高分类、识别的准确性。因此,W波段ISAR系统具有重要的应用价值,可用于空中/太空目标的分类和识别,弹道导弹防御中真假弹头、碎片和诱饵的识别,海面目标的分类和识别等[2-5]。
随着W波段高功率发射器件和准光馈电网络等技术的发展,国外已有W波段ISAR系统的应用先例。现有的W波段ISAR系统主要包括美国的HUSIR系统[6]和WARLOC系统[2],以及德国的COBRA系统[7]。其中:HUSIR系统主要用于对太空目标(如卫星等)进行成像和监视;WARLOC是一个岸基系统,主要用于对低空目标和掠海目标进行监视;COBRA系统是一个可工作在35,94,220 GHz的雷达系统,在W波段已获得了高精度的目标图像。目前,国内鲜有关于W波段ISAR系统的相关报道。本文介绍了一种W波段雷达系统,并进行了ISAR试验。论文安排如下:第1节介绍了该W波段雷达系统及其性能指标,第2节对W波段FMCW ISAR回波进行了建模和成像处理,第3节介绍了ISAR试验及其实测数据处理结果,第4节对全文内容进行了总结。
1 W波段FMCW ISAR系统
1.1 系统组成和参数
本文提出的W波段FMCW雷达系统主要由电源、频综、天线、发射/接收通道、数字接收机等组成。系统工作原理如图1所示。首先,频综产生中心频率为11.75 GHz的X波段线性调频信号,该信号经过倍频、放大后获得中心频率为94 GHz、带宽为5 GHz的W波段FMCW信号。然后,该W波段信号分为2路:一路通过发射天线辐射到外部空间,由目标反射的回波通过接收天线接收;另一路通过本振增益模块后,与接收天线接收的目标回波进行混频,从而完成去斜处理,得到差拍信号。差拍信号的频率与距离成正比,因此在距离向通过简单的傅里叶变换(FFT),即可获得目标的距离信息。最后,经过对下变频之后的中频信号进行正交解调,可得到2路正交的I路信号和Q路信号,通过数字接收机完成对I/Q这2路信号的采集和存储,并最终传输到电脑。
图2为本文介绍的W波段雷达系统的实物图。图2(a)展示了整个雷达系统的各个模块,包括电源模块、频综模块、射频前端、模拟中频接收机和数字中频接收机;图2(b)具体展示了射频前端的组成部分,包括辅助电源、发射天线、接收天线、倍频放大模块、混频模块等。
该系统的主要参数见表1。由表可见,该系统的发射功率为1 W,天线增益为23 dB,系统损耗为6 dB。
1.2 ISAR性能指标论证
本小节讨论了该雷达系统用于ISAR时的系统性能指标,包括最大作用距离、分辨率等。

图1 W波段雷达工作原理图Fig.1 Schematic diagram of W-band radar system
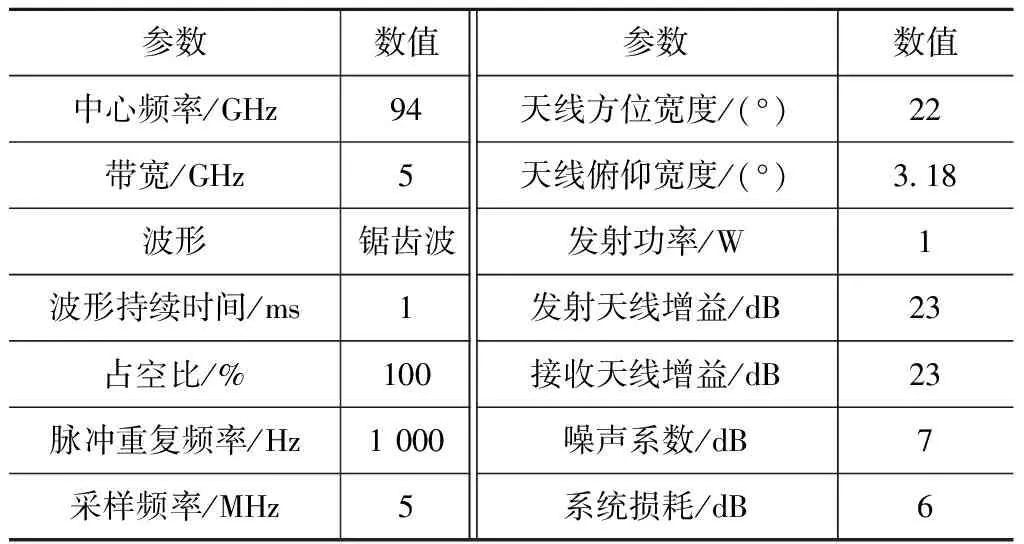
表1 W波段ISAR系统参数Tab.1 Parameters of W-band radar system
1.2.1 最大作用距离
根据ISAR系统的雷达方程,ISAR系统的最大作用距离可表示为
(1)
式中:Pt为发射机的峰值发射功率;Gt为发射天线增益;Gr为接收天线增益;λ为波长;Ls为系统损耗;Tr为脉冲持续时间;k为波尔兹曼常数,k=1.38×10-23J/K;T0为接收机系统的噪声温度;Fn为噪声系数;RSN为脉冲压缩后的信噪比。
在表1所示的系统参数下,不同系统损耗对应的最大作用距离如图3所示。

图3 不同系统损耗下的最大作用距离Fig.3 Maximum operating ranges corresponding to different system losses
由图可见:当系统损耗为58.7 dB(如对海观测)时,最大作用距离为54.27 m;当系统损耗为16.3 dB(如对空观测)时,最大作用距离为623 m。
1.2.2 分辨率
1) 距离向分辨率
与SAR相同,ISAR系统的距离向分辨率同发射脉冲的宽度有关[8],两者之间的关系为
(2)
式中:Br为发射信号带宽;c为电磁波传播速度;kr为距离向展开系数。不同带宽对应的距离向分辨率如图4所示。

图4 不同系统带宽对应的距离向分辨率Fig.4 Range resolution corresponding to different bandwidths
对于该系统5 GHz带宽而言,距离向分辨率可达0.03 m。当距离向展开系数为1.47时,距离向分辨率为0.044 m,系统的分辨率为cm量级。
2) 方位向分辨率
为获得更好的成像效果,需要方位向分辨率与距离向分辨率相匹配。对ISAR而言,方位向分辨率与目标相对雷达的转角有关,两者之间的关系为
(3)
式中:λ为信号波长;Δθ为目标转角;ka为方位向展开系数。
不同方位向分辨率对目标在相干积累时间内转角的要求如图5所示。

图5 不同方位向分辨率对目标转角的要求Fig.5 Azimuth resolution corresponding to different target rotation angles
由图可见,要获得更高的方位向分辨率,需要的目标相对雷达的转角越大。对于该系统,在不考虑方位向展宽系数时,为达到0.03 m的方位向分辨率要求,目标在相干积累时间内的转角需大于3.05°;要获得0.044 m的方位向分辨率,目标在相干积累时间内的转角需大于2.1°。
2 W波段FMCW ISAR回波建模和成像处理
2.1 信号模型和去斜处理
一个扫频周期内的线性调频信号形式为[9]
(5)
式中:j为虚数单位;fc为信号中心频率;Kr为调频斜率,Kr=Br/Tr。
对于FMCW信号,由于其持续发射和接收的特性,在一个扫频周期内,目标和雷达之间的距离不断变化。此时,脉冲雷达中“停—走—停”的假设不再适用[10-11],目标相对雷达的距离与快时间相关。接收的二维发射信号为
exp{jπKr(tr)2}
(6)
式中:tr为快时间;ta为慢时间。
接收信号形式为
exp{jπKr(tr-τ)2}
(7)
式中:τ为目标到雷达的双程时间延迟。目标到雷达的距离记为Rk(t′),t′=ta+tr,则τ=2Rk(t′)/c。
对于FMCW信号,一般采用去调频处理,即利用参考位置点目标的回波与实际目标回波进行混频,从而使目标和雷达之间的相对距离可通过差拍频率进行测量。
假设参考距离为Rref,则经过去斜处理后得到的差拍信号为

(8)
式中:第一个相位项为方位向相位历程;第二个相位项为距离维差拍相位;第三个相位项为残余视频相位(RVP)项,当其小于π/4时,可忽略。本文中介绍的W波段小型化ISAR,采用发射信号作为参考信号,即参考距离选择为0。
2.2 ISAR成像
在ISAR成像中,首先需对平动运动分量进行补偿,将任意运动目标的ISAR成像转化为对转台目标的成像。平动补偿包括包络补偿和相位补偿,包络补偿可通过互相关法、距离中心法、最小熵法等方法实现,相位补偿可通过最小方差法、多普勒中心法、最小熵法等方法实现。
由于94 GHz中心频率对应的波长为3 mm,对于W波段ISAR系统,散射点的运动在观测时间内更容易产生越距离单元徙动(MTRC)现象,影响成像质量。另外,当目标尺寸较大时,在目标转动过程中也可能出现多普勒走动的问题。因此,需对W波段ISAR系统进行二维徙动补偿。
W波段ISAR成像的基本流程如图6所示。具体算法流程如下:回波信号与参考信号进行复相乘,完成解线调频处理;对得到的差拍信号进行距离向FFT处理,实现距离压缩;然后进行包络对齐和相位补偿,完成平动补偿,将目标的ISAR成像转换为对转台目标的ISAR成像;最后通过Keystone变换完成距离向MTRC补偿,通过方位向FFT完成二维压缩,得到距离-多普勒域的ISAR图像。

图6 FMCW ISAR成像算法流程图Fig.6 Block diagram of FMCW ISAR imaging

图7 ISAR点目标仿真结果Fig.7 ISAR simulation results
ISAR点目标仿真结果如图7所示。利用表1中的参数仿真了7个点目标,图7(a)为平动补偿后的结果,图7(b)为方位压缩后的成像结果。由图可见:目标得到了良好的聚焦。
3 W波段ISAR外场试验设计和实测数据处理
为简便起见,利用该雷达系统进行转台试验,将目标放置在转动平台上。成像试验现场如图8所示。

图8 ISAR试验现场Fig.8 ISAR test site
在本次试验中,雷达与转台均被放置在具有一定高度的平面上,雷达波束水平指向转台目标。转台旋转角度和速度由方位分辨率决定。根据前面的分析,转台旋转角度需达到3.05°,因此当转台转速为1 (°)/s时,积累时间需超过3.05 s。另外,雷达与转台之间的距离需小于雷达的最大作用距离,且为了满足远场条件,需大于天线远近场边界条件,即
(10)
式中:Rmin为雷达天线远近场的边界条件;L为天线最大尺寸。按照表1中的参数,天线远近场的边界为4.3 m。试验中,雷达与目标的距离约为10 m。
在上述试验条件下,分别对飞机模型、人体模型进行ISAR试验,并利用RD成像算法进行粗成像处理。现场数据处理结果如图9所示。

图9 不同目标的光学图像和ISAR图像Fig.9 Optical images and ISAR images of different targets
图9(a)为人体模型的光学图像,图9(b)为其对应的ISAR粗处理图像,从ISAR图像中,可分辨出人体模型的头、躯干和四肢。图9(c)为泡沫飞机模型的光学图像,图9(d)为其对应的ISAR图像。由目前得到的ISAR粗处理结果可见,虽然目标的主要轮廓可被识别,但图像聚焦效果有待进一步提高。
4 结束语
本文介绍了一种小型化W波段FMCW体制雷达系统,该系统可用于SAR和ISAR。在ISAR应用中,该系统具有分辨率高和成像快速的特点。本文利用该雷达系统设计并完成了ISAR转台试验,获得了试验模型的ISAR初步成像结果。后续将对实测数据进行进一步的聚焦处理和质量提升,以获得聚焦效果更好的W波段ISAR图像,为目标分类、识别提供依据。