基于趋势补偿的防抱死系统轮速信号处理*
2019-01-16邹浙湘黄宝山
邹浙湘,王 倩,黄宝山
(北京理工大学珠海学院 工业自动化学院,广东 珠海 519085)
混合动力汽车是目前汽车发展的新趋势,其具有绿色环保、节能高效等诸多优点[1-3].然而,多个能源提供动力也带来了汽车电气控制、发动机协调控制复杂,故障率增加等问题.尤其是混合动力公交等交通工具,因启动和停止的次数频繁,对汽车防抱死系统(anti-lock braking system,ABS)的制动精度及准确度也提出了更高的要求[4-5].因此,有效提高ABS系统的信号检测水平,减小或者抑制ABS的控制误差,成为了汽车控制领域的新研究热点[6].
现有的ABS系统一般均是通过对轮速信号的获取和处理来得到反馈控制信号[7].常见的用于拾取轮速信号的传感器主要包括电涡流感测型、磁电型、光电型以及霍尔型等.其中,电涡流及磁电型传感器在检测精度上相对粗糙,检测信号存在迟滞或者延后的特点;光电型传感器在检测灵敏度方面虽然最高,却对使用环境的要求比较严格,污垢以及外界光强均会对检测精度产生影响因素,其在车辆运行的复杂环境下干扰因素过多;霍尔传感器[8]作为一种高灵敏、高精度的轮速传感器,相对于磁电类的传感器具有更突出的检测性能,同时对于外界环境影响又相对鲁棒,是一种更加适用于混合动力汽车应用的轮速检测传感器.
霍尔传感器在使用过程中,会因环境温度变化引起检测信号出现温度漂移[9-10],具体体现在轮速检测信号为一个低频的趋势波动信号[11].本文针对混合动力汽车的ABS霍尔传感器进行温度趋势估计和补偿,通过对霍尔传感器实时检测得到的轮速信号进行滤波,提取出联合中值均值加权[7](MEM)和经验模函数分解[12](EMD)表征温度漂移部分的趋势信号,并从轮速信号[13]中进行消除,从而实现高精度汽车制动控制,减少发动机运行故障,提高车辆运载效能[14].
1 混合动力系统结构
图1为本文采用的混合动力汽车系统结构框图,其展示了混合动力汽车内部主要原件之间的协调配合工作方式.主体可以分为4个不同部分:燃料储液总成、蓄能储能模块、气体冷却模块和轮速调控模块.燃料储液总成主要由蓄液池与其关联的压力控制结构组成,微米通气阀调节进入蓄液池平衡气体的数量,蓄液池泄压阀门起到对应的拮抗调节功能,液温及液位传感器检测蓄液池内可用燃料的状态是否能够支持汽车运行;蓄能储能模块直接连接燃料储液模块,具体由隔离阀以及过滤器调节与高压蓄能器之间的动态转化过程;气体冷却模块主要调节燃料通气燃烧以及内燃冷却过程,其主要通过联通阀和旁通阀组合调节进入蓄液池内的空气总量.空档压力传感器检测空档行为,冷却器起到对内燃系统控制和稳定温度的转化功能.轮速调控模块对应图1中间虚框,包括ABS、连接泵、变速传感器、泵速传感器和气泵,其附加霍尔传感器进行轮速检测,检测得到的轮速信号再进行滤波和趋势估计.
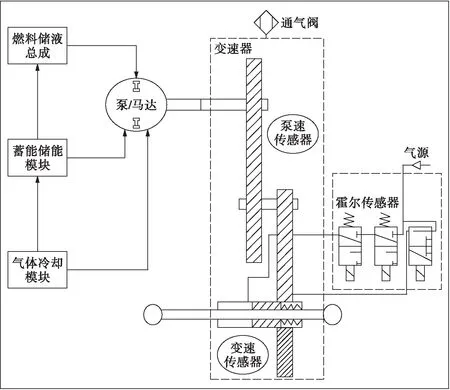
图1 混合动力系统结构图Fig.1 Hybrid power system structure chart
2 温度漂移趋势估计算法
轮速信号的常见误差主要来自传感单元的热噪声以及干扰产生的尖峰或毛刺信号.在利用霍尔传感器进行检测时,需要进一步考虑温度漂移带来的趋势项干扰和补偿问题.外界干扰及热噪声一般属于高频噪声,可以通过低通滤波器进行消除;然而温度漂移引起的趋势项却属于低频噪声.由于温漂干扰项的不确定性,传统高通滤波器难以满足既能有效滤除温漂干扰又可避免对轮速信号造成干扰的要求,本文通过联合中值均值加权(MEM)和经验模函数分解(EMD)来滤除温漂干扰并使轮速信息无损,算法具体步骤如下:
1) 以信号的首尾对原信号进行延拓处理,假设需要滤波的轮速信号X(t)的长度为L,其首值以及尾值分别为X(0)、X(L-1),设定该滑窗的长度为W,则延拓方程可表示为
(1)
2) 利用Xext(t)对每个窗内的向量进行中值和均值加权估计.估计值可近似理解为中值与均值的一个凸组合,即

(2)

(3)
式中,
(4)
通常k的取值范围为[1.14,1.95],本文算法中取k值为1.5.每次数值求解的迭代次数至少为30次,这样才能保证最终的解收敛到可以承受的求解精度内,本例算法的迭代次数n为50.
3) 将所有估计值组成一个新的变量We作为温漂干扰的一个初步估计,并对其进行EMD分解,得到一系列固态模函数(IMF).当滑窗滑过整个数据信号后得到对应数量的估计值组合在一起即为对原信号中温漂干扰的估计值We.需要补充说明的是:每个估计值相对精确值是有误差的,这个误差反映了MEM方法的固有缺陷,其有一定的统计规律,且服从一个0均值的渐近正态分布,即
(5)
(6)
式中:θn为迭代n次之后得到的数值解;θ为精确解;ψ(x)为积分核函数,是一个高阶多项式核函数;F(x)为积分的核函数分布函数.
为了进一步修正这部分误差,对滤出的We进行了EMD分解.具体步骤如下:
① 确定We的所有局部极大值点和局部极小值点.
② 通过3次样条插值分别拟合局部极大值点和局部极小值点,得到上下两个包络线.
③ 从We减去上下包络线的均值m1,0(t),得到中间量h1,0(t)=We(t)-m1,0(t).
④ 将h1,0(t)作为一个新的We,并重复上述步骤②、③,得到h1,k(t)=h1,k-1(t)-m1,k(t),直到收敛阈值SD值介于0.2~0.3之间停止迭代.其中,SD计算表达式为
(7)
⑤ 将h1,k(t)定义为第一个IMF,即c1(t),从We中减去该IMF得到第一个残基r1(t)=We(t)-c1(t).
⑥ 将残基r1看成一个新的We,重复上述步骤,得到一系列c2,c3,…,cN和r2,r3,…,rN,其中,N为迭代终止次数,直到最后的残基rN是一个常量、单调直线或单极值点的函数,通常将最后的残基作为最后一阶IMF.
4) 根据MEM的固有缺陷,采用t检验对IMF进行筛选.低阶IMF分量含有较多的高频分量和较少的低频分量;而MEM引入的误差分布在比温漂干扰频率高的频带,且这部分误差在时域服从一个0均值的渐近正态分布.因此,本文算法采取从高阶IMF到低阶IMF进行部分求和的t检验,该检验是为了筛选出哪些IMF组合为MEM引入了误差.
5) 将筛选出的IMF重构后,从We中减去即可得到较准确的温漂干扰,再从原轮速信号中减去得到的准确温漂干扰,即可得到准确的轮速信号.假设在t检验过程中,发现第P阶为MEM引入了误差,将这部分值从We中减去,便得到了最终修正后的Wf,即
(8)
温漂干扰本身也有可能是0均值,故在迭代t检验时,本文算法会在当前阶等于IMF总数一半时强行终止.在这种特殊情况下会引入部分误差,但误差不会过大,最后从原信号中减去Wf得到修正后的轮速信号.
3 实验结果
本文提出了一种温度漂移趋势修正算法,轮速信号取自实验采集的ABS制动时标准数据库,其采样率为360 Hz.将10 mV的振幅范围进行11位的离散化处理,振幅在0~2 047之间,其中1 024对应0值.实验样本截取3 000点数据,相应MEM滑动窗口长度L在120~200点之间.另外,为了进一步测试算法的有效性,通过低通一个随机序列来产生一系列的人工噪声.随机序列的振幅范围区间为[0,C],服从均匀分布.图2示例给出受人工噪声(C=500)污染与修正信号的对比,可看出所提算法即使在明显温度漂移的情况下,仍能有效恢复原始轮速信号.图3进一步给出了估计得到的温度漂移趋势.

图2 温度漂移轮速信号对比Fig.2 Comparison in wheel speed signal with temperature drift correction
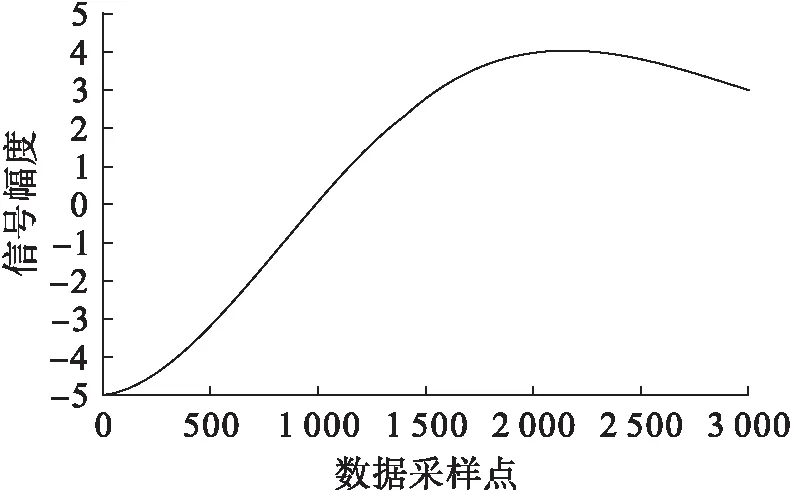
图3 估计温度漂移趋势信号Fig.3 Estimated temperature drift trend signal
为了更好地量化显示本文算法的性能,通过计算信噪比(SNR)来评价算法有效性,SNR的计算方法为SNR=20ln(Sσ/Nσ).实验采集ABS制动时霍尔传感器检测得到的标准数据库的数据,并融合给定实验条件下的噪声信号.剔除噪声的性能越好,其得到的噪声估计信号和原始加入的噪声越接近,实际残存在信号中的噪声Nσ越小,滤波信号Sσ与噪声Nσ的信噪比越高.将本文算法和基于形态学滤波方法进行了横向对比,表1列出了在不同振幅C值下的平均SNR值.
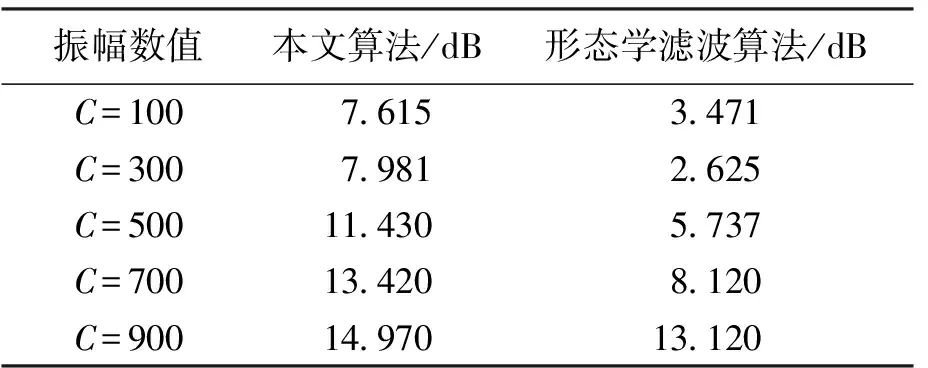
表1 本文算法与形态学滤波方法结果对比Tab.1 Comparison in results of proposed method and morphological filtering method
实验结果表明,本文所提算法能够有效估计温度漂移干扰,从而消除ABS制动系统的轮速监测误差.因为所提出的算法包含了一个自修正的过程,从而能更加合理、精确地选择出温度漂移干扰的分量,由此可提高整体的滤出效果.
4 结 论
作为一个完全非线性的滤除温度漂移干扰方式,本文算法避免了传统滤波器中由于固定截止频率而带来的误差.MEM滤波器以一种非线性的方式将原始信号的低频部分滤出,EMD方法将MEM的输出分解成一系列IMF,在这些IMF中,t检验会选出温度漂移干扰的成分.该算法能够有效滤除温度漂移干扰,并能保存轮速信号的有用信息,从而实现高精度的汽车制动控制,减少发动机运行故障,提高车辆运载效能.