一种可穿戴式新型助力装置的研究
2019-01-14李任伟刘君
李任伟 刘君

摘 要:针对迅猛发展的快递行业,解决家电类箱式货物运送难的问题,本项目采用机械结构设计技术、自动化控制技术和先进材料作为研发基础,设计轻便、实用的可穿戴式助力装置,该装置具有平地充当拖车作用,上楼扶持货物和遥控升降装卸货功能,分析了该装置的结构特点及技术创新性,对于搬运助力装置领域的研究工作及未来发展方向,具有一定的指导意义。
关键词:穿戴式 助力装置 装卸搬运
中图分类号:TH789 文献标识码:A 文章编号:1674-098X(2019)08(c)-0056-02
1 国内外现状
现阶段国内外对可穿戴人体助力器的研究成果大多都针对老年人、医疗和军事应用方面。美国和日本是研究人体外骨骼助力装置最早的国家,将人工装卸搬运助力装置视为人的灵活性、机动性、智慧性与助力装置的有机结合,并且都有一定的研究成果。美国加州大学伯克利分校研发了一种可负重的动力型外骨骼 BLEEX系统,该系统靠液压驱动,可以完整完成下肢7个自由度的活动[1]。日本研发了PAS气压动力服,该气压动力服是一种专门为医护人员设计的外骨骼装置,该装置包括肩部、手臂、腰及腿部等结构,依靠气动系统提供动力,可以辅助医护人员看护行动不便的患者[2]。我国中科院和浙江大学等针对日益增多的脑卒中病人康复训练需求,研发了传感系统控制的新型的外骨骼机器人[3,4]。外骨骼穿戴式助力机器人虽然能够输出较大的助力,但由于其庞大的外骨骼框架, 加之复杂的传感系统,并且造价昂贵,导致适用范围小,实用价值并不乐观[5]。
随着我国经济的快速发展和互联网消费的日益增加,货物运输总量逐年呈直线上升趋势,导致配送工人压力越来越大。尤其是体积大型箱式货物,在外界条件有限的情况下,只能由人来完成最后的运送,在此过程中搬运工人存在劳动强度大、行走不便和爬楼困难等问题,严重影响了工作效率。经过前期市场调研,国内外快递配送行业,除助力推车类器械外,市场上少有便携可穿戴式的助力装置,市场处于一种急需状态。所以,本项目针对物流快递行业,研发一款便携助力装置具有市场创新性。
2 研究内容
2.1 设计思路
(1)产品的模拟仿真:通过计算机制图仿真,模拟产品的整体构造及运行过程;
(2)产品结构设计:通过模拟的结果及市场的调研实际情况,设计出产品形状和结构;
(3)材料的选择与试验:根据产品各部位功能的特点,选择能满足力学条件的理想轻质材料,通过材料力学性能试验,确定最终选材;
(4)控制系统试验与选配:根据设计理念,需将电机驱动部分进行改装,进行电池匹配,完成整个控制系统的测试工作;
(5)产品的装配和调试;
(6)产品试验阶段。
2.2 技术特点
本装置采用机械结构设计技术、自动化控制技术和先进材料作为研发基础。结构设计充分考虑产品整体设计合理性和安全性(装置与人体匹配的舒适性、自由性的体现),在机械控制结构基础上,引入遥控控制系统,控制系统驱动伸缩杆调整拖物平台高度,可以使拖物平台落地后充当拖车功能,抬起后充当手臂拖物功能,增强了人的自由操控性和安全性,控制系统采用超级微锂电池和改装电机构成,整体的主体材料采用复合碳纤维和航空铝。
3 功能简介
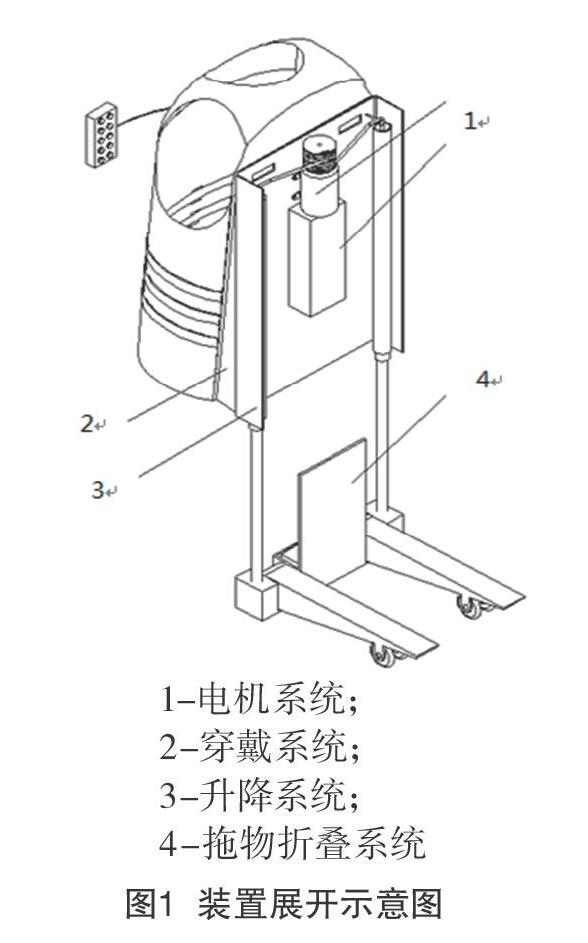
该装置主要针对家电类箱式货物研发,穿戴人体上,可实现平地拖车、上楼扶持货物和遥控升降装卸货功能,有效提高工人的工作效率、安全性和自由性。产品展开状态示意图如图1。该装置主要由(1)电机系统;(2)穿戴系统;(3)升降系统;(4)拖物折叠系统组成。图2和图3分别为工作人员模拟平地工作和爬楼工作时的效果图,工作人员在平地搬运货物过程中,此助力装置可以充当拖车使用,在从平地过渡到爬楼过程时,可将物体背起,通过遥控系统调节伸缩杆长度来控制重物高度,节省了劳动力、提高了工作效率和安全性。
4 产品创新性
(1)多功能创新:综合考虑人在徒手运送货物过程中存在的困难,本产品实现平地拖车、上楼辅助和遥控升降装卸功能,提高了工人工作效率并节省体力消耗;
(2)技术创新:脱离了单纯的机械控制结构,引入了遥控控制系统,实现遥控器控制产品各项功能,增强了人的自由操控性;
(3)设计创新:利用物理力学分解原理,将货物重力分配到人的肩部、后背和腰部,防止身体的局部单一受力而导致受伤,符合人体结构学;
(4)材质创新:产品材料将采用航空铝和碳纤维复合材料,使产品最大轻量化,以达到便携的目的。
5 结语
从国内外助力装置的发展现状得出,针对老人、医疗和军事行业的助力装置已经比较成熟,但是很少有关于针对物流行业人工便携助力装置研发的相关报道。本项目研发从装置的内容、特点、功能和创新性进行介绍,在这个互联网购物飞速发展的社会,未来的快递行业对货物的配送将面临前所未有的压力,本项目的研发不仅具有极大的创新性,而且具有广阔的市场前景。
参考文献
[1] Kazerooni H, Steger R, Huang L. Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX)[J]. The International Journal of Robotics Research,2006,25(5-6): 561-573.
[2] Yamamoto K.Stand Alone Wearable Power Assisting Suit-Sensing and Control Systems[C]Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication, Roman: IEEE,2004: 661-666.
[3] 孙建,余永,葛运建,等.基于接触力信息的可穿戴型下肢助力機器人传感系统研究[J].中国科学技术大学学报, 2008, 38(12):1432-1438.
[4] 杨巍,张秀峰,杨灿军,等.基于人机5杆模型的下肢外骨骼系统设计[J].浙江大学学报(工学版),2014,48(3):430-435.
[5] 高波.人工装卸搬运助力装置研究现状及关键技术[J].中国储运,2014(12):144-147.
