基于燃烧状态信息的火灾燃烧物识别方法
2019-01-12,,
,,
(浙江工业大学 信息工程学院,浙江 杭州 310023)
火灾一直威胁着人类生命财产安全。目前火灾探测技术主要包括吸气式[1]、红外光束[2]和图像视频技术[3]等,这些技术存在布线复杂且性价比低、结构不灵活等缺点。随着无线局域网(Wireless local area network, WLAN)[4]的发展,无线网络已经广泛部署于各种室内场合,如学校、医院、餐厅和小区等。如果能充分利用这些网络资源来实现火灾检测,将大大降低系统成本。在火灾信号处理算法方面,国内一些学者针对多传感器数据融合和智能化或者进行深入研究,周晓琳采用多传感器数据融合技术实现对火灾特征信息的采集与处理,然后提出了一种新的神经网络算法,建立BP网络火灾预警模型[5]。但BP神经网络训练速度慢,易出现过拟合情况。Andrew等利用PEN3电子鼻工具和协方差k-最近邻近概率神经网络算法,根据火灾燃烧的气味进行早期火灾检测[6],响应速度快。Chen等阐述了火灾报警和火灾燃烧过程中的理化特性之间的关系,并提出了基于贝叶斯网络的火灾预警模型[7]。但贝叶斯网络训练过程复杂,需要的数据多。Cheng等分析了火灾的燃烧过程,选择温度、一氧化碳、烟雾作为神经网络的输入,利用神经网络的自学习特性,该方法具有较强的容错性和抗干扰能力,提高了早期火灾探测能力[8],但无法解决训练耗时长的问题。Sowah等提出利用Arduino控制器采集火焰传感器、烟雾传感器和温度传感器数据,并结合模糊逻辑算法判断火灾,将其用于车内火灾检测[9]。但Arduino相当于在一般的单片机上进行了一层屏蔽底层的封装,从而导致代码的执行效率比传统单片机开发低,不适合实际的嵌入式开发项目。
现在火灾检测只是单一判断火灾是否发生,还鲜有学者对火灾燃烧物种类进行判断。张智轶提出基于图像处理的火灾燃烧物识别[10],通过提取火焰的温度特征和形体特征,来识别火灾燃烧物种类,但该方法只能在有火焰产生时才能检测出火灾燃烧种类,而且火灾发生过程中会产生大量烟雾,造成图像质量低,对火焰特征提取造成干扰。早期火灾发生是伴随着烟、光和热的化学和物理过程,同时伴随释放气体燃烧产物,包括氧(O2)、一氧化碳(CO)、二氧化碳(CO2)、甲烷(CH4)、乙炔(C2H2)和一氧化氮(NO)。不同可燃物产生的火灾烟雾颗粒的粒径分布、平均粒径、形状、组分和质量浓度等参量不同[11],这些特性为识别不同燃烧物提供判断依据。因此,笔者选取颗粒浓度传感器、甲烷传感器、可燃气体传感器以及一氧化碳传感器等提取不同燃烧物的特征,提出一种将燃烧状态信息和极限学习机结合的识别方法。采用ESP8266无线模块发送数据,经过滤波处理后以此作为极限学习网络的输入,对燃烧物种类进行预测,从而为火灾扑救工作提供参考,达到防灾、减灾和减少损失的目的。
1 STM32F无线网络采集系统的设计
1.1 传感器的选择
不同燃烧物在燃烧过程中会伴随不同的产物,但一些信息只有火灾发生很长一段时间后才会被检测出来,像火焰、燃烧音和固态高温产物等。经过实验发现温度在火灾初始阶段变化不明显,早期火灾以释放出烟雾和一些气体为主,因此选择MQ4甲烷传感器、MQ5可燃气体传感器和MQ7一氧化碳传感器。此外不同可燃物在燃烧过程中产生的颗粒浓度、组分会有差别,这也成为区分不同燃烧物的重要特征。笔者选取PMS5003颗粒物浓度传感器,该传感器利用光的散射原理,通过采集火灾环境中的悬浮颗粒物,然后统计不同粒径颗粒物质量浓度,并以数字形式输出。该传感器可以检测气体中PM1.0,PM2.5,PM10的浓度。无线采集模块如图1所示。
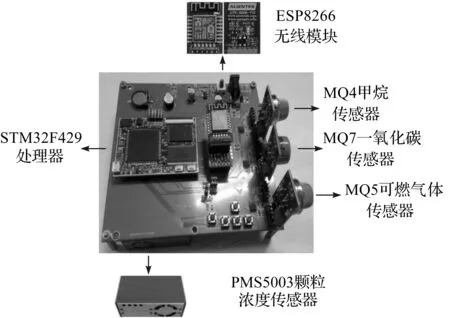
图1 STM32F无线采集模块Fig.1 STM32F wireless acquisition module
1.2 采集控制器的选择
系统采用STM32F429处理器完成传感器数据采集,此芯片拥有3个12位ADC,其中ADC1拥有16条复用通道,对于模拟信号的传感器拥有很好的兼容性,便于对MQ系列传感器的数据采集。同时该处理器拥有8个串口资源,能够同时满足数据采集和通信。基于以上优点,该芯片也广泛应用于工业生产中[12]。系统软件的设计基于UC/OS Ⅲ嵌入式操作系统,该操作系统的移植有大量的参考资料,移植十分方便。无线模块采用ESP8266模块,该模块采用WIFI芯片作为无线通信的载体,能够充分兼容现有的无线网络,能够使系统具有更加强大的兼容性能,能够在任何一个拥有WIFI的地方接入互联网,也可以使用任何具有无线功能的终端接入该系统。这样就可以利用现存的WIFI网络进行火灾检测。天线方面使用简单的PCB天线即可达到空旷环境下400 m的传输距离。使用编写好的PC客户端程序,可以通过TCP/IP协议对已经接入网的控制平台进行访问,读取控制台数据。
2 燃烧状态信息及极限学习机分类方法
传统火灾检测系统基于单一传感器,但单一传感器检测存在可靠性差,容易受到环境干扰等缺点。不同燃烧物特性不同,单一传感器无法准确判断火灾种类。多传感器信息融合能有效克服单一传感器带来的不足,综合各类传感器信息,对燃烧物进行更细粒度分析,实现火灾燃烧物识别。在实际测量中,监控点(Monitor point, MP)接收从接入点(Access point, AP)发来的数据包分组,同时将各个传感器状态信息数据记录到一个txt文件中。txt文件中的数据由多个数据包构成,而每个数据包代表燃烧物在某时刻各个传感器值。
2.1 传感器数据预处理
在对不同燃烧物数据进行极限学习机分类前,需要进行数据的预处理,实验环境中,燃烧物和传感器有一定距离,传感器的输出值很容易受到周围环境影响,包含各种噪。图2(a)为纸张燃烧过程中甲烷传感器信号输出,从图2可以看出:输出信号中含有许多噪声分量,噪声可能来源于环境和元器件电磁干扰。
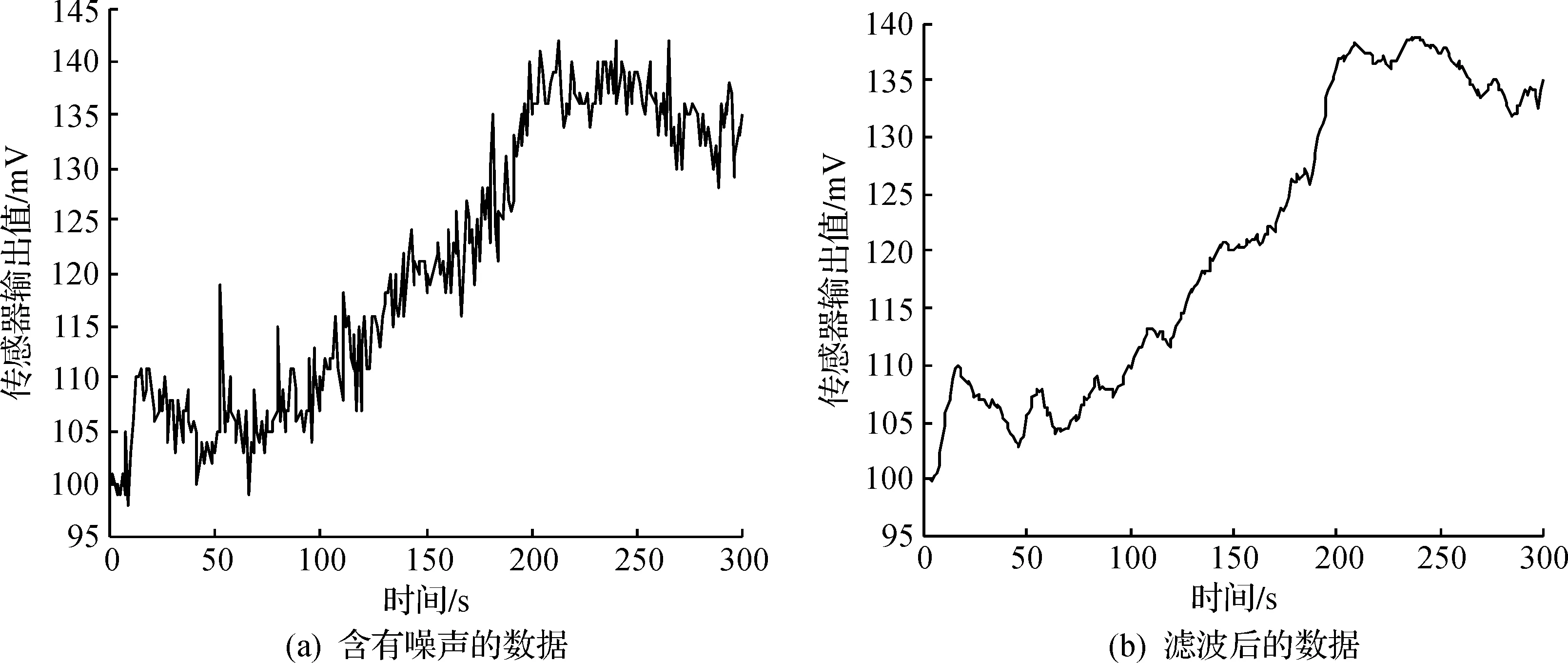
图2 噪声数据和滤波后的数据Fig.2 Noise data and data after filter
采用加权移动平均滤波从测量信号中滤除噪声,保留反映真实情况的样本数据。在某个时段传感器接收的数据可以表示为{x1,x2,…,xt},滤波后t时刻值为

(1)
式中:m为移动窗的大小;xt为t时刻滤波后的值。由式(1)可以看出:加权移动平均滤波器不同地对待移动期内的各个数据。对近期数据给予较大的权数,对较远的数据给予较小的权数。图2(b)为窗宽度为10时滤波后的波形图,经滤波处理后能有效滤除信号中噪声部分。
数据预处理第二步就是归一化,归一化是指将每一维度的数据转换到(0,1)的范围内,这就防止样本中某些取值过大的特征对其他特征产生影响,归一化方法为
(2)
式中:Xnew,Xold分别为归一化之前和处理后的样本数据;Xmin,Xmax分别为训练数据中的最小值和最大值。从式(2)可以看出:若采集数据中存在噪声,就会对归一化产生干扰,因为噪声值可能为训练数据中的最大值或最小值,这样导致归一化失败,这也是在归一化之前先进行滤波的原因。
2.2 燃烧状态信息
火灾燃烧物分类关键在于:不同燃烧物在阴燃或燃烧状态产生的燃烧产物是有区别的,并对传感器产生不同影响。因此燃烧物的识别要求传感器对不同燃烧物要具有一定区分度。
为了验证这一条件,选取了颗粒浓度传感器、可燃气体传感器和一氧化碳传感器等对纸张、布料、木材、蜡烛和香烟5种可燃物响应,结果如图3所示,横坐标为时间,纵坐标为传感器输出的值,由图3可以看出:火灾燃烧初始阶段火灾环境特征变化较小,发展阶段随着气体释放,燃烧物各种气体体积分数增高,烟气量开始增加,传感器输出变化明显。相对其他燃烧物,蜡烛燃烧过程中释放烟雾较少,各传感器变化较为平缓。由于不同燃烧物是独立燃烧,并且传感器有误差范围,所以不同传感器初始值不同。从图3可以看出:不同燃烧物在不同时刻的燃烧状态具有一定的区分度,可以分辨出燃烧物的种类。
2.3 极限学习机分类原理
利用多传感器对可燃物进行识别最终归结为分类问题,采用机器学习中一个新分类算法——极限学习机网络。极限学习机[13-14]是一种单隐层前馈神经网络。网络的输入层权重和隐藏层偏置是随机产生的,输出层权重利用Moore-Penrose广义逆计算得到,因此网络的学习速率有很大的提高。
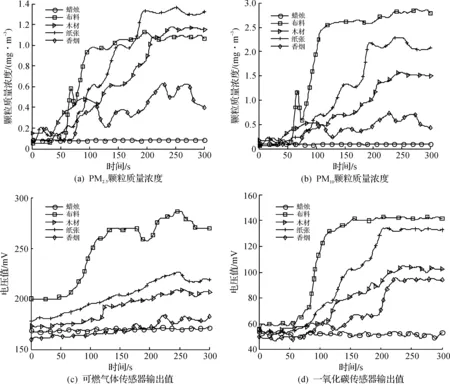
图3 传感器响应曲线Fig.3 Response curves of sensors
给定一个样本集(Xi,ti),i=1,2,…,N,其中ti=(ti1,ti2,…,tim)∈Rm,网络隐含层具有L个单隐层节点,激励函数为g(x),则ELM网络实际输出为
(3)

(4)
由矩阵表示为
Hβ=T
(5)
其中:
H(W1,W2,…,WL,b1,b2,…,bL,X1,X2,…,XN)=
则式(5)中β由最小二乘法解得
β=H+T
(6)
式中H+为隐含层输出矩阵的广义逆。
从ELM算法过程可知:在设定合适的隐藏层神经元后,随机为输入权重和偏差赋值,在计算隐藏层矩阵后,通过最小二乘法得到输出权重,这样就一次完成该问题的求解过程,不需迭代,降低网络模型训练时间。
3 可燃物分类实验及结果分析
3.1 实验平台
实验平台主要分为接入点(AP)和监控点(MP),其中AP是由STM32F429处理器、传感器和无线模块采用ESP8266模块构成的采集系统,MP安装了自己用C#编写桌面端软件笔记本电脑,操作系统为Windows 7。在采集数据时,燃烧点放置在房间内某个位置,MP接收来自AP的数据包,并从中提取出燃烧物数据,数据中包含了不同传感器信息。
3.2 实验环境及参数设置
为采集火灾环境数据,选取1间长宽高为2.4 m×1.8 m×2.9 m房间。因为燃烧点位置不同,烟雾飘向会有所不同,为研究燃烧点对采集器和算法的影响,在房间选取4个数据集点,燃烧点之间距离为1.2 m,燃烧点距AP距离为1 m,AP高度为30 cm。选取香烟、纸张、木材、蜡烛和布料5种材料作为可燃物进行分类,如图4所示。
3.3 实验结果分析
对于每个测试点选取200个数据作为训练数据,50个为测试数据。记录每个燃烧点测试数据的分类结果,画出其混淆矩阵,如图5所示,横纵坐标1,2,3,4,5分别代表香烟、纸张、木材、蜡烛和布料。
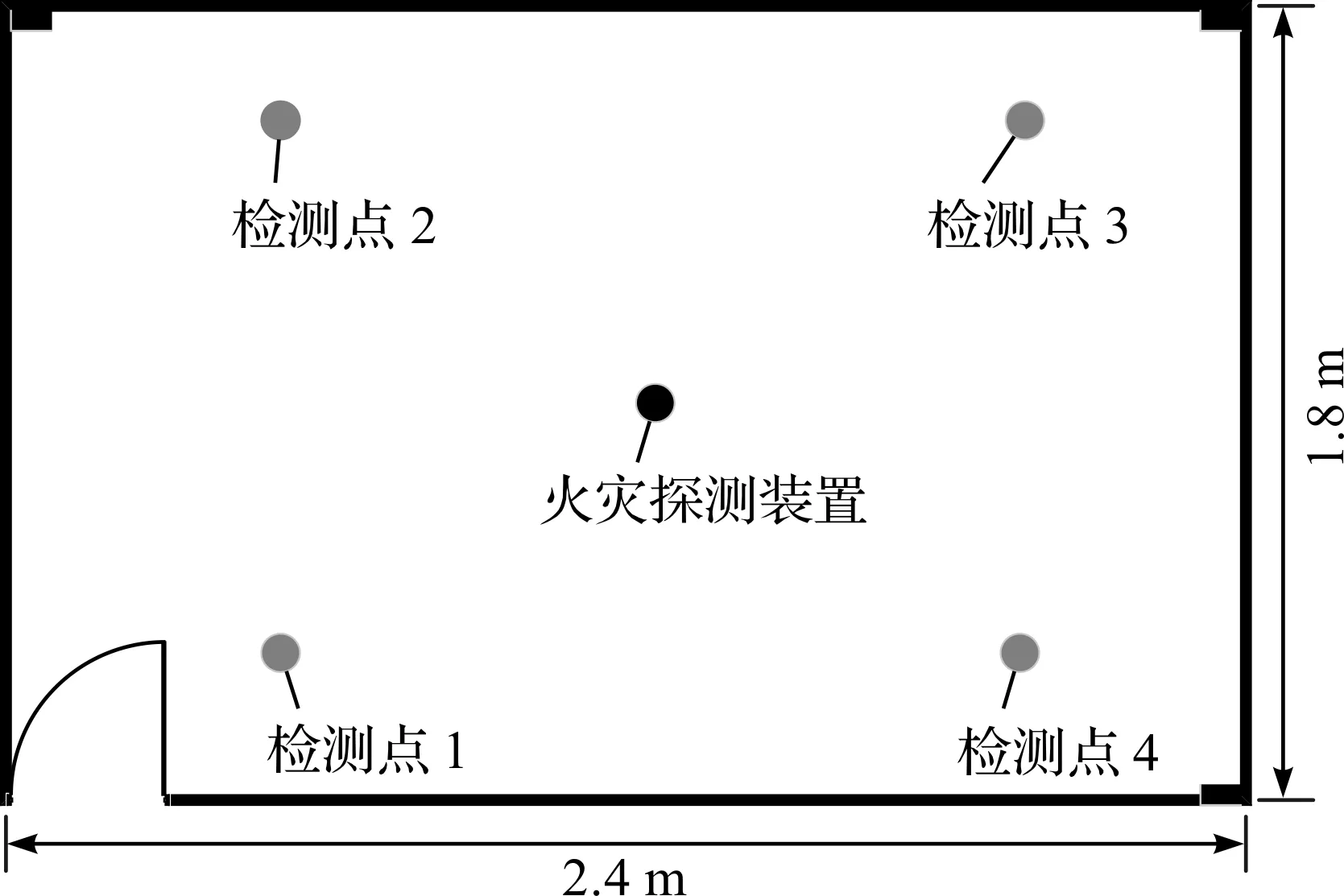
图4 火灾数据采集点分别Fig.4 Distribution of fire date collecting points
其中,颜色灰度条表示分类效果,色块颜色越黑表明分类到该类的样本数量越多。每个色块的颜色深浅表示该类燃烧物分类到某个燃烧物的数量。对角线的颜色越黑,表明该燃烧物的分类效果越好。

图5 极限学习机分类效果Fig.5 Performance of ELM
由于不同测试点烟雾飘向不同,造成分类结果会存在一定差异,少数样本分类错误,从图5中可以看出:大部分结果都集中在对角线的位置,即获得了正确的分类,因此也表明本方法受烟雾飘向的影响较小。
为了检测方法的有效性,在每个火灾试验点随机选取250个样本作为训练样本.50个样本作为测试样本。将极限学习机和传统的分类算法BP神经网络[15]、Nbyes[16]作比较,BP神经网络和Nbyes采用Matlab自带工具箱,其中BP神经网络利用LM规则训练前向网络。每种算法单独运行20次,统计平均值如表1所示。
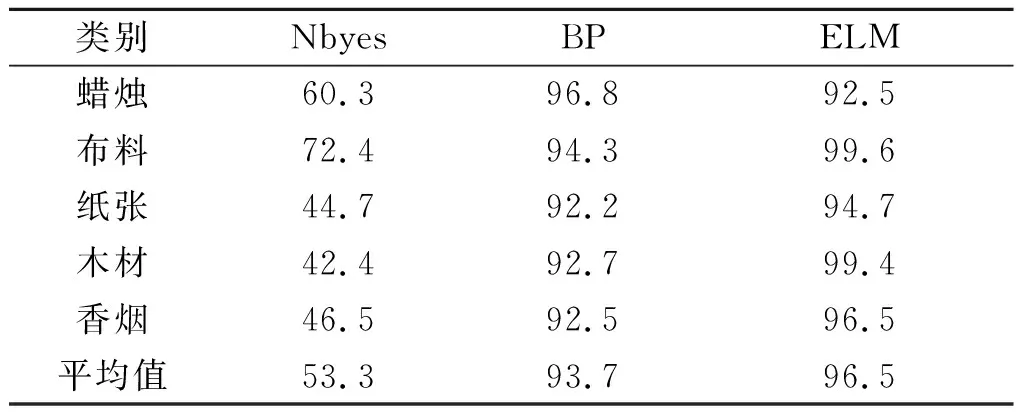
表1 测试集分类结果Table 1 Classification results of the test set %
从表1可以看出:Nbyes方法识别正确率差别较大,纸张、木材和香烟3种燃烧物的正确率较低,识别正确率只有44.7%,42.4%,46.5%。因为Nbyes模型假设属性之间相互独立,而火灾环境中的特征量很难保证是完全独立的,这给Nbyes模型的正确分类带来了一定影响。BP神经网络和极限学习机ELM对5种燃烧物都能达到较高正确率,ELM在布料和木材正确率达到99%以上。
表2为3种算法的性能分析,因为ELM网络结构简单,无需迭代进行学习,所以训练和测试所需时间最少,远少于BP神经网络,BP神经网络由于需要进行反馈,学习训练时间较长,Nbyes方法和极限学习机训练时间短,BP神经网络训练时间是极限学习机的几十倍,极限学习机在达到较高正确率的同时能大大降低训练时间。
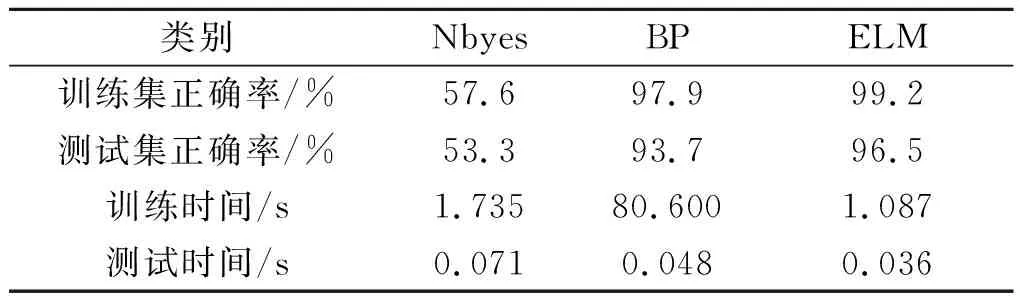
表2 3种算法性能比较Table 2 Performance comparison of three algorithms
4 结 论
利用搭建的STM32无线数据采集平台进行燃烧物数据采集,实验平台灵活,不受环境限制。研究发现不同燃烧物的燃烧状态信息具有一定区分度,对燃烧物分类是可行的。以颗粒质量浓度、可燃气体、一氧化碳和甲烷作为样本特征向量,在算法上利用极限学习识别精度高和建模速度快的优点,完成火灾燃烧物种类识别方案,并将结果与BP神经网络和Nbyes网络对比,相对于BP神经网络,极限学习机在建模速度上更快,识别准确率高于Nbyes网络,实现了对火灾燃烧物种类的判断,能够为火灾现场处理提供参考。本方法在某些方面还存在改进地方,如讨论燃烧物量对各个观察特征的影响,针对有风环境等更复杂的情况则需要进一步的深入研究,以提供更多的技术支持。
