航天器电磁对接技术发展综述
2019-01-11王波庄原刘芃王宁韩润奇朱佳林
王波 庄原 刘芃 王宁 韩润奇 朱佳林
(1 北京空间飞行器总体设计部,北京 100094)(2 沈阳航天新光集团有限公司,沈阳 110861)
自20世纪60年代至今,空间在轨交会对接技术已发展了50多年,出现过十几种空间对接机构,其中主流的对接机构形式为碰撞式对接机构,目前在“国际空间站”等任务上仍广泛应用。这种碰撞式对接机构基于2个对接航天器间的相对运动实现碰撞捕获对接,系统流程简单可靠,但在对接过程中依赖于航天器姿态轨道控制精度,存在较大的对接冲击力,且存在燃料消耗与喷射,可能造成羽流污染,损害邻近的光学仪器和敏感器件,同时消耗大量燃料将限制航天器的在轨服役寿命。随着对接载荷的精密化和大型结构的柔性化,为提高对接过程的安全性,通过弱撞击方式进行空间对接已成为未来空间对接技术的发展趋势。电磁对接作为弱撞击方式之一,其概念在2000年前后被提出,是指2个航天器利用电磁力或电磁力矩作为控制力实现在轨相对距离和姿态的调整并完成最终对接的技术。它能有效避免传统推力器方式所固有的燃料消耗、羽流污染等问题,具有非接触、连续、可逆及同步控制能力,理论上可实现航天器间相对速度为零的弱撞击式对接[1-5]。
近十几年来,对电磁对接技术做了大量的原理方案探索和试验验证研究,例如NASA联合ESA的“低冲击对接系统”(LIDS)项目、华盛顿州立大学的“在轨自主服务卫星”(OASIS)项目、德克萨斯大学的“电磁力导引的自主对接和分离”(EGADS)项目等,均开展了基于电磁力导引实现地面一维或二维对接的试验验证。另外,也有少数经历过在轨验证的项目,例如美国麻省理工学院的“同步位置保持及重新定位试验卫星”(SPHERES)项目在“国际空间站”内成功完成了自主对接试验。电磁对接技术是未来航天器弱撞击对接的解决方案之一,因此,针对电磁对接技术的理论研究和工程实践具有重要的意义。本文在分析多个电磁对接项目研究进展的基础上,论述了电磁对接系统所涉及的关键技术,并对电磁对接的发展趋势进行展望,可为我国后续电磁对接技术研究和工程应用提供参考。
1 电磁对接项目发展情况
目前,对空间电磁对接技术已有大量的探索。从研究进展方面来看,电磁对接技术并不成熟,尚未得到大规模的在轨应用,研究大多处在地面试验验证阶段,也有少数经历过在轨飞行的搭载验证,同时新的原理与应用构想也在不断出现。
1.1 试验验证阶段项目
1.1.1 SPHERES项目
SPHERES项目[6-9]中提出采用电磁装置辅助2颗微小卫星实现在轨对接及锁紧,并研制了一套通用对接机构(UDP),进而基于“国际空间站”舱内的在轨环境完成了考虑避免障碍物碰撞等多种约束条件的自主对接试验,如图1所示。
为了实现较大的对接容差及机械载荷传递,SPHERES项目采用电磁对接的方式实现2颗微小卫星之间的柔性捕获,研制的UDP如图2所示。该对接机构主要由电磁铁、锥杆锥孔和电机传动组成,利用电磁力实现逼近捕获,利用电机驱动带有锥杆的丝杠实现连接锁紧,既能保证柔性大容差对接,又能完成较大的预紧力连接。该项目基于电磁对接技术深入研究了自主控制对接和编队飞行策略,对微小卫星组网飞行具有重要意义。


图1 SPHERES卫星在“国际空间站”内演示对接 Fig.1 Docking demonstration of SPHERES satellites in ISS

图2 SPHERES项目的UDPFig.2 UDP for SPHERES project
1.1.2 “微型自主舱外摄像机器人”(Mini AERCam)项目
NASA的Mini AERCam项目使用的电磁对接机构[10-12],主要是母舰对球形太空摄像机器人实施捕获和对接。Mini AERCam电磁对接机构见图3,主对接机构主要由电磁铁、半球形导引面、相互契合的棘爪结构、球形锁和电机驱动的对接引导结构组成。其工作原理为:在2个对接机构进入对接范围内后,电磁铁通电实施对接,球形外部结构很容易在半球形的导引面作用下实现对接。在棘爪结构相互接触后,电机开始动作,辅助两边的棘爪结构完全契合,对接期间带弹簧的球形锁也起到了加固对接的作用。在Mini AERCam机器人需要被释放时,电磁铁磁极反向,同时配合电机运动,可以实现机构的分离。考虑到发射等对接载荷较大的情况,仅依靠电磁力和球形锁无法保持机器人与母舰的稳固连接,为此,NASA还设计了机器人保持机构,见图4[9]。机器人在工作期间可自由飞行拍摄,必要时可通过对接机构与母舰进行充电和数据交换。该项目在1997年完成了首次在轨验证,之后进一步优化完善,并在2005年6月进行了地面演示验证,成功验证了自主导航、电磁捕获等相关技术,见图5。
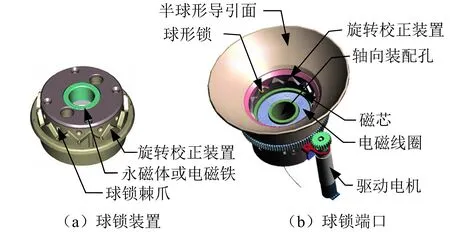
图3 Mini AERCam项目电磁对接机构Fig.3 Electromagnetic docking mechanism of Mini AERCam project
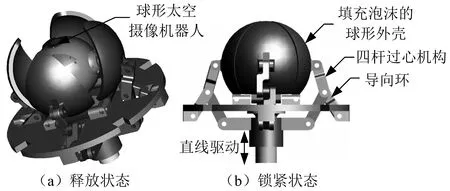
图4 Mini AERCam项目电磁对接保持机构Fig.4 Electromagnetic docking retention mechanism of Mini AERCam project
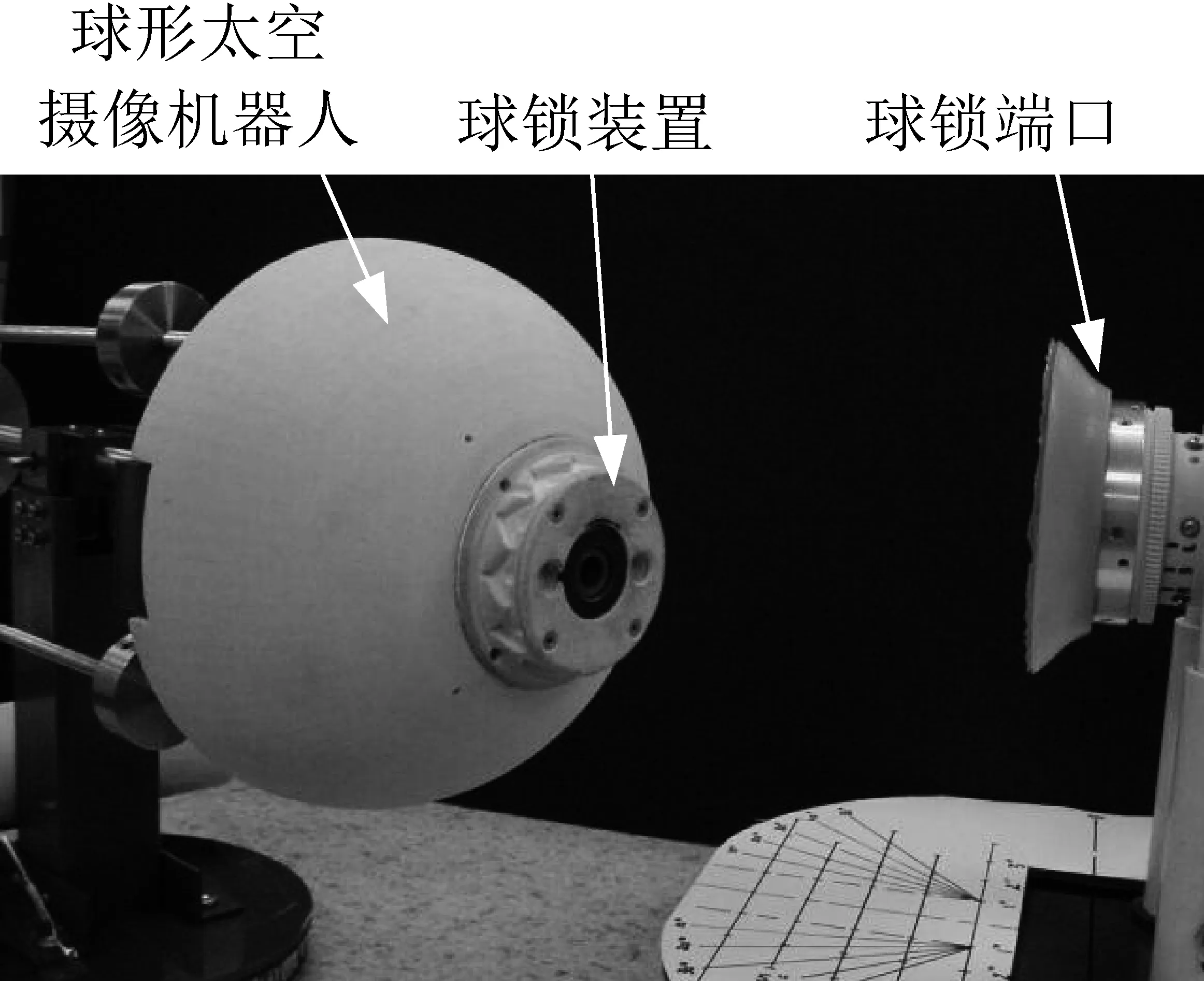
图5 Mini AERCam项目电磁对接机构地面试验验证
1.1.3 LIDS项目
NASA约翰逊航天中心联合ESA研发了LIDS项目,以适用于未来航天器高容错性、高适应性等目标需求。LIDS项目需要在2个对接飞行器上分别设置主动对接子系统和被动对接子系统,通过电磁力和机械引导实现对接,具有弱撞击、高对接精度等优点。LIDS项目电磁对接机构如图6所示,借鉴在“国际空间站”上使用的对接机构,在其基础上采用机电一体化设计,并应用柔性控制技术,在对接环上安装电磁装置用于捕获对接,能实现低速捕获和主动捕获,提高对接捕获性能。
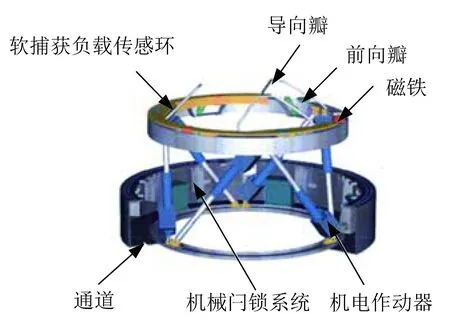
图6 NASA LIDS项目电磁对接装置
1.1.4 OASIS项目
美国华盛顿州立大学的OASIS项目,主要对卫星的在轨自主服务概念和相关技术进行验证[13]。该项目包括2颗卫星,分别为提供在轨服务的验证服务卫星(DSS)和接受在轨服务的验证模块卫星(DMS),通过2个试验阶段验证交会对接技术(见图7)。
图7中示出了交会对接过程。①自主交会阶段,在对接距离500~1 m内,依靠传统冷气式推力器提供动力;②自主对接阶段,在对接距离1~0 m内,依靠环形电磁线圈电磁对接装置提供对接动力。在自主对接阶段,主要通过改变DSS上环形电磁线圈电流的大小实现DSS和DMS相互作用力的控制,从而实现对接过程中速度的控制。为验证功能的适用性,在没有配备任何姿态控制系统的情况下,成功实现了地面对接试验,在一定程度上验证了电磁对准特性。
1.1.5 EGADS项目
美国德克萨斯大学开展了在微重力条件下的EGADS项目[14],如图8所示。在封闭长方体柜子内充满液体,用于实现微重力环境,通过调节两侧电磁阵列中电流的大小来控制中间永磁体(有效载荷)与两侧电磁阵列的对接和分离。2006年,该项目成功在飞机上进行了微重力环境下的演示试验。
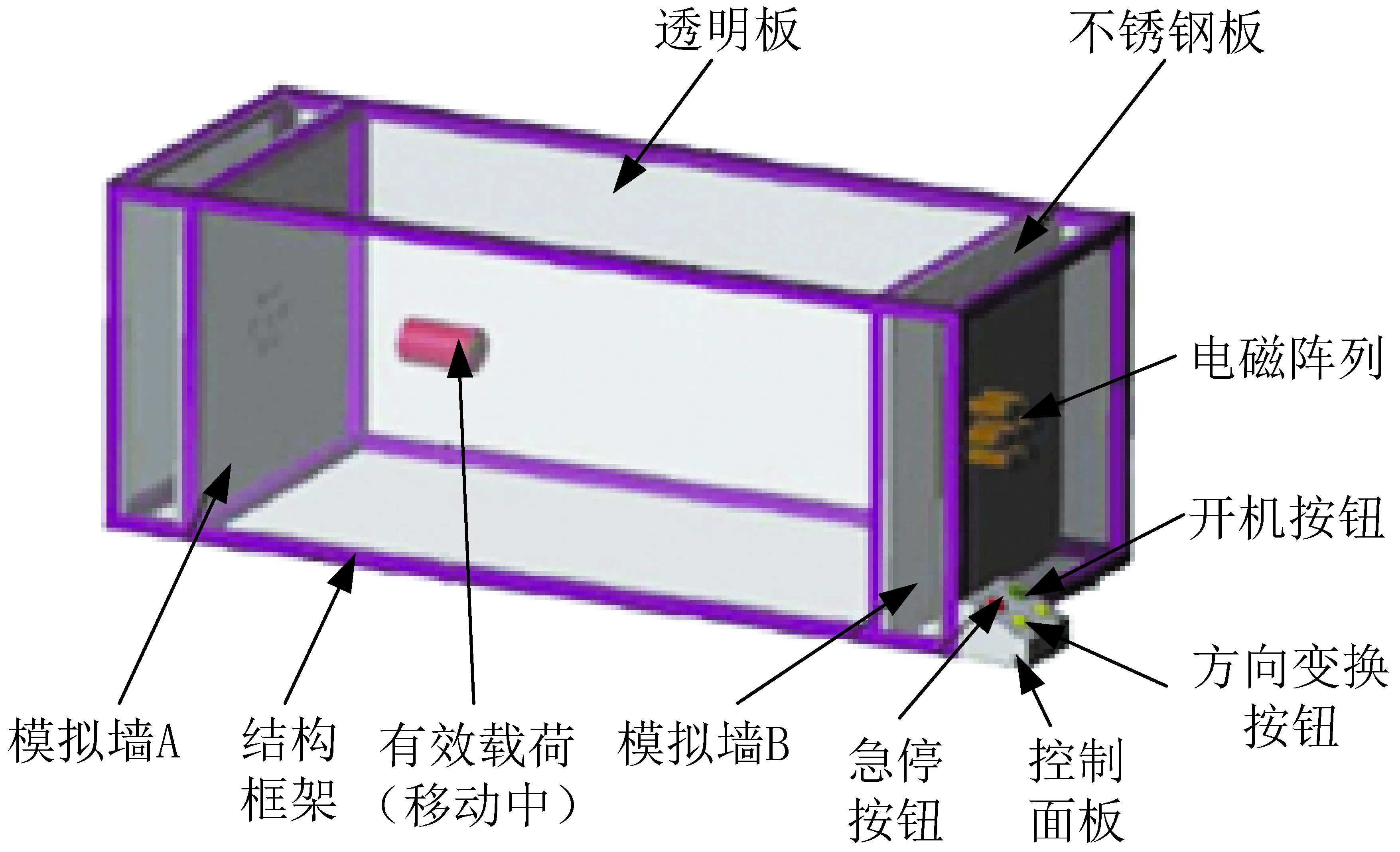
图8 EGADS项目地面试验装置
1.1.6 “有效载荷在轨发射搭载对接机构项目”(SLIPP)
为验证电磁力能驱动服务卫星和目标卫星实现对接的可能性,美国蒙大拿州立大学的空间科学与工程实验室实施了SLIPP[15],如图9所示。2007年,该项目进行了一维电磁柔性对接地面试验,演示了距离服务星1 m的目标星通过电磁力实现加速至2 cm/s的巡航速度,然后在电磁斥力的作用下减速,并在与服务星接触时速度为零,成功实现了“零冲击”的柔性对接。
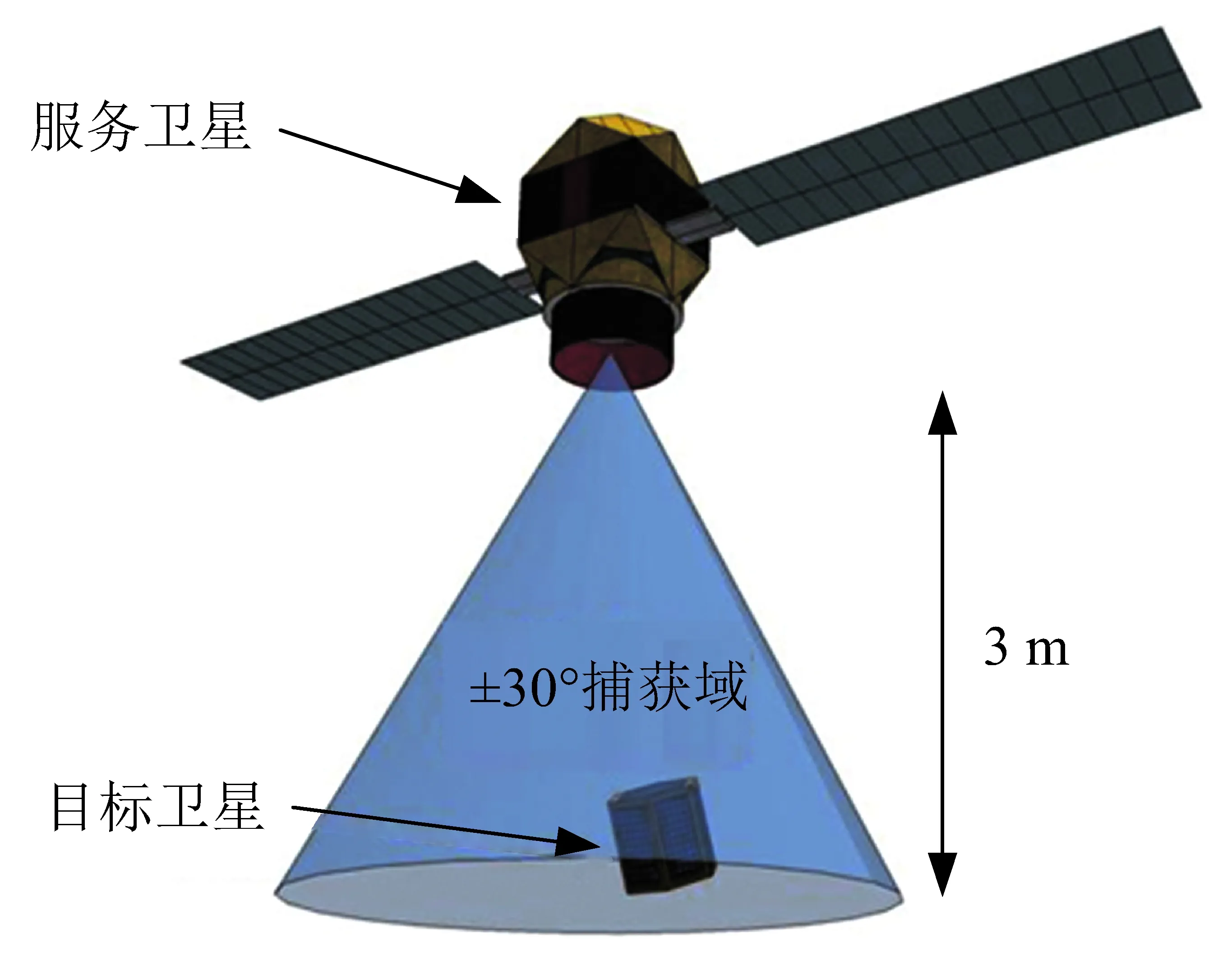
图9 SLIPP空间对接示意
1.1.7 “柔性拉索电磁对接”(FELD)系统项目
欧洲帕多瓦大学提出了拉索式电磁对接(TED)机构的概念,并设计了FELD系统及其对接试验[16-18]。对接过程主要分为发射拉索、软对接、回收拉索和硬对接4个阶段,如图10所示。

图10 FELD系统项目电磁对接的4个阶段
FELD系统主要由探头发射系统和探头接收系统组成,如图11所示。这套机构的电磁对接主要体现在探头接收系统捕获探头上,其对接平台采用分层结构,嵌入电磁铁产生电磁力,用来捕获磁铁制成的探头。FELD系统机构的地面演示试验已经完成,目前其研制团队正在研究将该系统应用于立方体卫星的可行性。

图11 FELD系统机构模型
1.2 原理与应用构想阶段项目
1.2.1 “智能化自供能模块”(ISM)项目
考虑到大型航天器的在轨组装及扩展需求,英国萨瑞大学在ISM项目[19]中提出在模块航天器上设计安装电磁平面对接系统(EFDS),以完成安全可靠的三维对接组装,如图12所示。智能自加注模块的中心为卫星本体,电磁平面对接系统安装在ISM的6个正方形面上,每个电磁对接面上装有7个含铁芯的螺线管,其他面上安装太阳电池板。

图12 ISM空间对接效果和结构Fig.12 ISM space docking effect and ISM structure
1.2.2 “可重构太空望远镜自组装”(AAReST)项目
在ISM项目的基础上,为研究未来直径大于20 m的大口径太空望远镜技术问题,2011年由英国萨瑞大学、美国加州理工大学等共同提出了AAReST项目[20-22],旨在验证在轨组装可重构太空望远镜的相关硬件和技术,如图13所示。AAReST项目主要包括3U立方体纳卫星“反射卫星”(MirrorSat)和15U的“主卫星”(CoreSat),通过微推进和电磁对接系统实现MirrorSat和CoreSat的对接和分离,从而实现在轨重构技术。该项目的电磁对接系统主要由4个按照上下两层分布的通电螺线管组成,通过控制通电螺线管中电流的大小和方向满足对接和分离过程中电磁力的需要,电磁对接装置见图14。
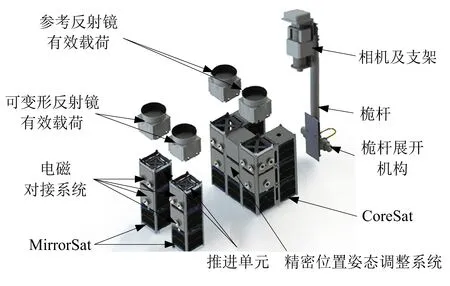
图13 AAReST项目航天器组成示意Fig.13 Spacecraft elements of AAReST project
1.2.3 “3U立方体卫星”(3U CubeSat)项目
文献[23]中提出了利用新型永磁体实现3U CubeSat自主交会对接的技术方案,其主要思想是通过动力学建模和电磁协调控制弱化对电磁对接的机械结构要求。在试验中,卫星的电磁对接头仅有一个凸点和一个凹点,见图15。虽然该种方法尚未成熟,控制策略也很复杂,但很可能因其设计简单实用的优势引领立方体卫星的电磁对接发展潮流。

图15 3U CubeSat项目对接模型
1.2.4 “自主交会控制和对接试验”(ARCADE)项目
欧洲帕多瓦大学研究机构通过开展ARCADE项目[24-25],实现了子航天器(SMAV)和主航天器(PROXBOX)之间的空间交会对接与分离,如图16所示。ARCADE项目对接系统机构主要由磁性探头、对接锥体、弹簧阻尼和对接托盘组成。该机构容差较大,在对接过程中有多个微触开关和光耦传感器判断对接机构的状态。机构简图如图17所示。

图16 ARCADE项目对接系统试验平台Fig.16 Experimental platform of ARCADE project docking system
1.2.5 国内相关项目
国内的研究起步较晚,目前国防科技大学和中北大学的课题组进行了相关研究。
国防科技大学的张元文等采用线性扩张状态观测器、反馈线性化及鲁棒H∞控制技术,设计空间电磁对接的鲁棒协调控制,并通过仿真检验所设计控制方案的性能及其鲁棒性。仿真结果表明:控制器不但可以观测到系统所有状态变量,而且能提高系统对模型不确定性及外界干扰的鲁棒性,跟踪控制性能良好。应用反馈线性化和鲁棒H∞,通过控制设计方法,采用内外环控制策略,内环采用非线性状态反馈控制实现输入-输出线性化,外环采用鲁棒H∞,实现对模型不确定性的稳定控制[2-4]。
国防科技大学的张强、陈小前等对柔性自稳定空间电磁对接系统设计进行研究并试验,分析电磁对接系统组成元件的电磁特性,建立两同轴等半径电磁线圈的数学模型,采用数值仿真分析方法,得到2个电磁线圈相对距离与电磁力大小的关系,以及电磁线圈半径与电磁力作用范围的关系,并进行了试验验证[26]。
中北大学的杨臻等提出一种新型的空间电磁对接机构(如图18所示),完成空间合作目标电磁对接机构的结构设计,利用虚拟样机系统动力学仿真软件对模型分析,实现空间合作目标电磁对接过程整体动作的模拟。运用有限元软件对空间电磁对接机构进行电磁耦合仿真分析计算,得到不同电流情况下的电磁场云图,通过对电磁场云图的分析掌握不同电流对电磁铁组件和吸附力的影响规律[27]。该方法与欧洲帕多瓦大学研究团队提出的FELD系统原理有相似之处。
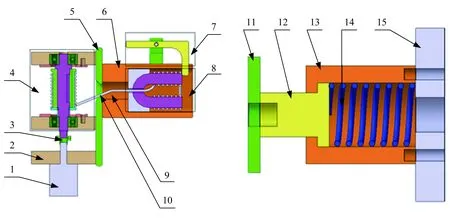
注:1-电机,2-电机支架,3-联轴器,4-卷扬机组件,5-基座,6-外壳,7-锁紧机构组件,8-电磁铁组件,9-发射机构,10-柔性索及电线,11-吸附块,12-顶杆,13-顶杆外筒,14-弹簧,15-底座。
图18 电磁对接机构
Fig.18 Electromagnetic docking mechanism
2 电磁对接系统关键技术
针对上述研究可发现,目前已开展了较为广泛的电磁对接技术研究,这些研究主要集中于利用电磁力实现航天器对接近距离捕获、校正、缓冲及锁紧过程中的部分功能,并且多面向微小卫星的对接需求。目前,电磁对接技术要实现广泛应用,还有待于电磁对接系统技术、电磁力/力矩控制模型技术和电磁对接位置姿态检测技术的持续突破。
2.1 电磁对接系统技术
在电磁对接全流程任务过程中,合理的系统设计与全局规划是方案是否最优的关键所在。目前,公认的主流电磁对接系统设计思路为,仅利用电磁装置实现导引和对接,再利用精巧的机械机构实现连接锁紧。2个对接体在距离较远时通过电磁力完成轨道控制和质心控制;近距离时利用电磁力矩完成姿态控制;接触后再通过机械机构实现连接锁紧。例如,FELD系统项目、ARCADE项目、Mini AERCam项目和LIDS项目所研究的电磁对接机构,均采用这种电磁导引与机械机构相结合的方法完成对接任务。尤其是对电磁导引过程,通过系统方案的设计优化实现对电磁力/力矩的巧妙利用,最终实现精确的轨道控制和姿态控制。由于电磁力/力矩的引入,需要通过系统方案设计和优化解决以下问题。
(1)电磁体之间作用力随距离的增加以指数量级减小,量级与电磁体材料与结构有关,因此,确保在一定的距离范围、功耗、质量等约束条件下,提供满足电磁对接所需的电磁力/力矩是需要解决的问题。目前,主要解决途径有2种:①采用“超导线圈”;②在普通线圈中加铁芯以增加电磁力[28]。超导线圈的优势在于允许线圈在一定功率下通过大电流,大大提高了线圈产生的电磁力。不过,超导材料只有在低温条件下才具有超导性,需要设计专门的冷却系统;另外,增加铁芯会增加系统的质量。上述问题均需要通过系统优化设计解决。
(2)外磁场对电磁对接系统的干扰不能忽略。地磁场对航天器姿态产生影响,可使航天器发生旋转。地磁场的影响可以通过系统设计技术规避,如控制电磁铁工作时间,或频繁改变电磁铁的极性等。
(3)电磁对接系统会对航天器上的电子设备产生干扰。针对该问题,在电磁对接系统设计时应充分考虑电磁屏蔽问题,使用电磁屏蔽材料进行隔离,或在敏感电子设备周围进行电磁屏蔽,也可以在电子设备附近布设一些与电磁对接系统极性相反的磁极,以使电子设备旁的磁场局部为零。
2.2 电磁力/力矩控制模型技术
与传统的空间对接技术不同,空间电磁对接技术实现对接的动力为电磁力/力矩,因此对空间电磁对接系统而言,关键问题是电磁力/力矩的建模技术。电磁场的问题通常可以通过麦克斯韦方程组进行表述和求解,但由于实际问题的复杂性,在工程上很少应用,常用的方法是采用简化的磁偶极子模型。偶极子模型根据麦克斯韦方程可以求解其精确解,但精确解中包含着不能求解的积分,通过对积分公式进行泰勒级数展开,可获得解析解。
麻省理工学院太空系统实验室在“电磁编队飞行”(EMFF)项目中提出近场、中场及远场3种电磁力模型[28]。近场模型即精确模型,指不忽略通电线圈的匝数、尺寸等因素,通过一系列的积分得到电磁力/力矩,适用于2个航天器的间距为任意值的情况。远场模型是近场模型的一种线性化模型,是将通电线圈简化为电磁铁,并将电磁铁建模为磁偶极子,对磁偶极子进行一阶泰勒展开得到电磁力/力矩。通过这种方法得到的电磁力/力矩表达形式更简单,能应用于相应的理论研究和控制方法中;但该方法在简化过程中对2个航天器的间距有一定的限制,若要满足模型相对误差小于10%,间距至少是通电线圈半径的6~8倍。中场模型是近场模型的高阶线性化,要求2个航天器的间距至少是通电线圈半径的3~4倍,此时满足模型相对误差小于10%的精度要求,但电磁力/力矩的数学表达式非常复杂,很难用于相关的控制研究。
国内在远场模型的基础上开展了空间电磁对接动力学与控制的相关研究,提出了电磁自对接性的概念,并对电磁对接与分离过程中电磁力的强非线性、耦合性等问题设计了跟踪偏差反馈鲁棒控制器,将空间电磁对接的路径跟踪问题转化为跟踪误差渐近稳定问题,并采用基于扩展卡尔曼滤波的比例-微分(PD)控制方法进行控制律设计,研究航天器空间电磁对接过程中的六自由度控制问题,利用理论推导及数学仿真验证该控制方法的有效性[2-4]。
2.3 电磁对接位置姿态检测技术
在电磁对接过程中,2个航天器靠近时需要位置和姿态的调整,它们之间的相互定位检测关系到电磁力/力矩的闭环控制,进而影响最终的对接精度,因此是电磁对接系统的又一关键技术。目前,电磁对接系统大多选用摄像装置测距定位或机械接触反馈的方法实现位置姿态检测,并在对接试验中进行了功能验证,为后续电磁对接技术的在轨应用奠定了基础。
SPHERES项目使用摄像机与LED灯阵列的方式检测目标卫星的相对位置,同时通过检测LED灯阵列几何变形反求姿态关系,如图19所示。这种方式可以实现空间六自由度的定位检测。
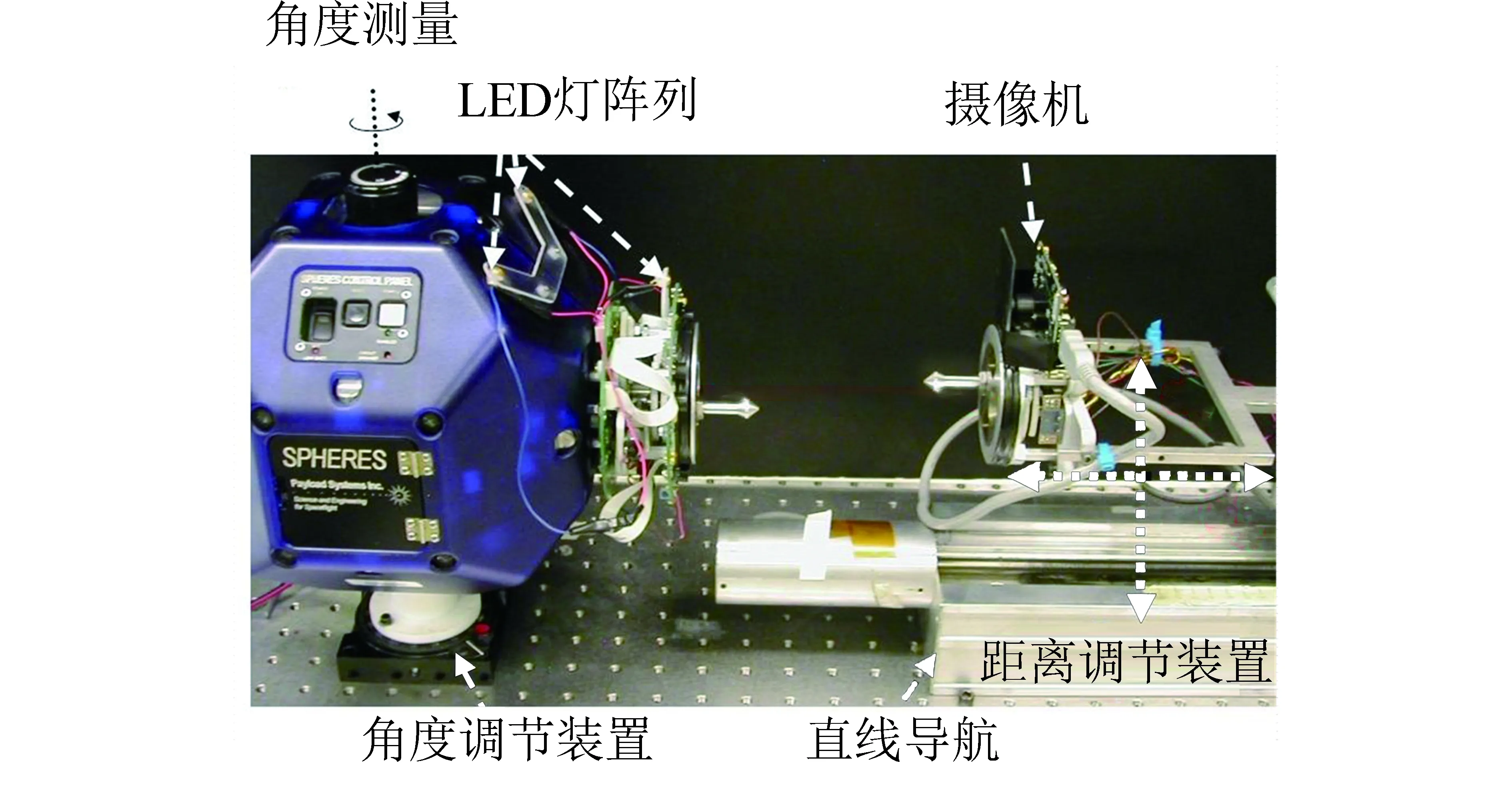
图19 SPHERES项目位置姿态检测系统Fig.19 Position & attitude measurement system of SPHERES project
ARCADE项目对接系统采用红外测距的方式实现子航天器SMAV和主航天器PROXBOX的定位检测,在PROXBOX上固定一个红外发射装置,SMAV上装有2个红外接收器,通过接收的测距信息求解相对位置参数。由于2个航天器固定在一个试验平台上,因此仅需要实现平面三自由度的定位检测,见图20。
除了引导对接过程的定位检测,在对接过程中还需要一些判断对接机构接触状态的机械式传感器。ARCADE项目对接机构中设置了接触式的微动开关和光耦接触传感器,可以对机构接触状态进行检测和信号反馈,给出下一步机械锁紧的动作指令,见图21。
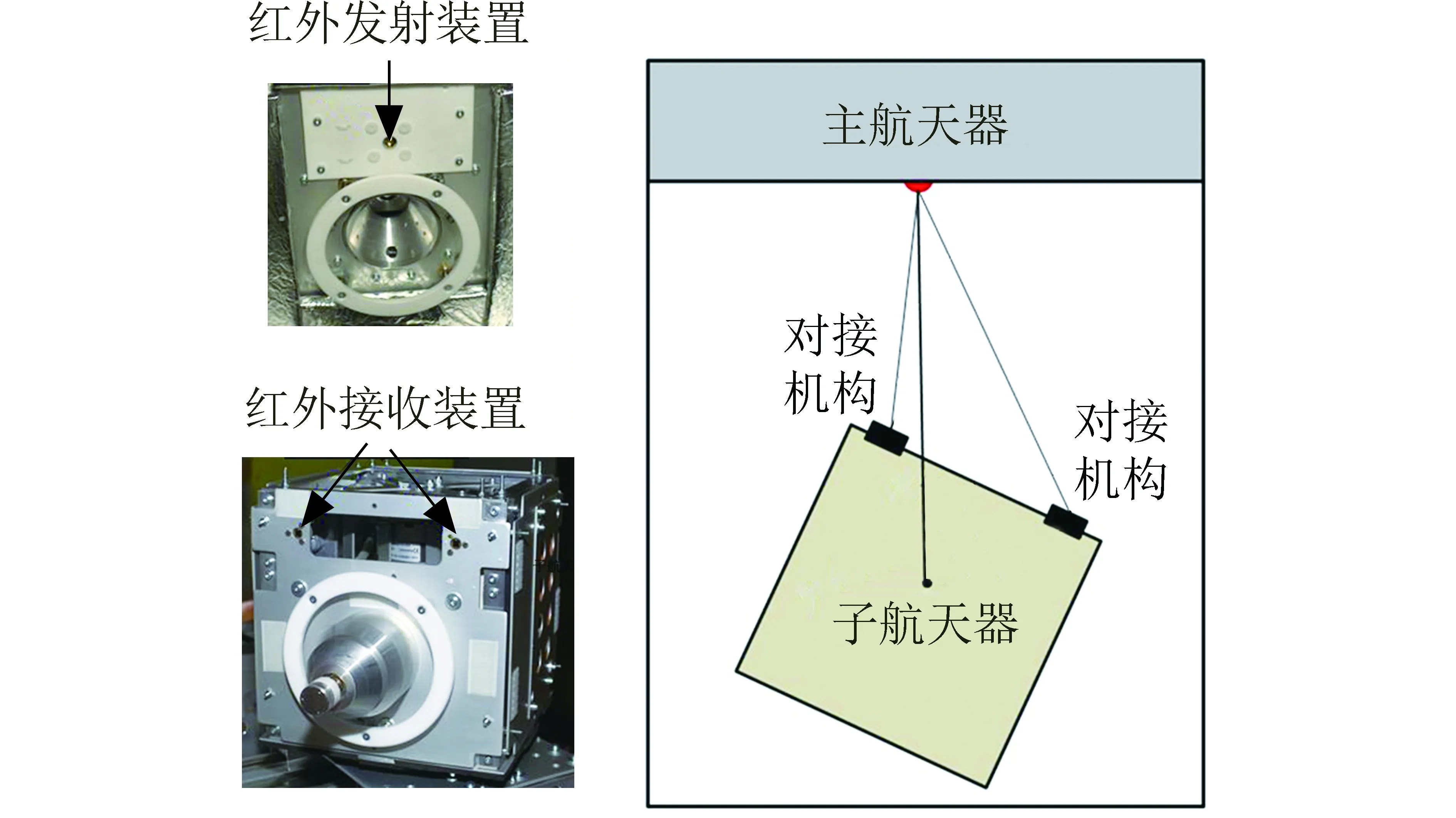
图20 ARCADE项目位置姿态检测系统

图21 ARCADE项目对接信号接收检测系统
3 未来发展趋势
目前,国内外开始大量研究空间电磁对接技术,尤其在微小卫星领域已经进行了很多地面试验验证,也进行了一些在轨飞行验证。根据电磁对接技术的研究情况,可对其发展趋势进行以下展望。
(1)将电磁对接技术应用于航天器远距离导引、捕获、校正、缓冲及锁紧全过程,目前还受制于关键技术的突破;但仅仅利用电磁技术实现对接过程中的捕获、校正或缓冲,是一种成熟的工程设计思路。例如Mini AERCam项目、OASIS项目、EGADS项目及SLIPP,均开展了基于电磁力导引实现地面一维或二维的对接试验验证,利用电磁对接机构成功实现了对目标的捕获、校正和辅助锁紧功能;SPHERES项目基于“国际空间站”舱内的在轨环境完成了考虑避免障碍物碰撞等多种约束条件的自主对接试验。
(2)目前的电磁技术足够支撑其在微小卫星上的应用,随着系统设计能力的增强、电磁控制技术的进步和高温超导等关键技术的突破,电磁力可提供足够的驱动力,届时电磁对接技术必将会适用于大型航天器。例如,NASA与ESA联合开发的LIDS项目,就是为了满足未来高容错性、高适应性等大型航天器的对接需求,通过电磁力和机械引导实现柔性对接,是一种典型的电磁式弱撞击对接系统,预计在“龙”飞船与“国际空间站”对接任务中得到在轨验证。
(3)在关注电磁对接技术优点的同时,也应在系统设计中充分考虑强磁场带来的负面影响。只有进行系统性的电磁防护设计,规避电磁对接强磁场影响邻近设备的正常工作,才能正真实现电磁对接技术的在轨可靠应用。
电磁对接技术可以极大简化传统对接系统的复杂性,同时可减少燃料消耗和羽流污染,增强对接过程的姿态和速度可控性,实现真正的弱撞击、低冲击对接和重复使用,有望在未来的微小卫星编队飞行、大型航天器在轨组装及在轨服务任务中实现广泛应用。
