基于主动预警的智能穿戴设备
2019-01-10万启东王泽学秦杨梅樊森清肖泽仪
万启东 王泽学 秦杨梅 樊森清 肖泽仪


摘 要:参与道路交通的行人会受车辆和其他快速移动物体的威胁,且行人规避车辆撞击伤害的方式几乎都是被动的。从行人的角度出发,提出了一种智能穿戴设备设计,使行人可以对运动车辆或物体的撞击做出早期预警,主动规避撞击伤害的风险。该智能穿戴设备采用毫米波雷达传感器测得移动物体的各种物理参数,通过STM32蓝牙系统将数据傳送至APP进行安全算法运算,再根据计算结果对撞击风险做出评估并向穿戴者进行早期预警。
关键词:主动安全预警;智能穿戴设备;毫米波雷达;蓝牙通信;STM32;APP
中图分类号:TP39文献标识码:A文章编号:2095-1302(2019)12-00-03
0 引 言
据统计,2018年全国机动车保有量达3.27亿辆[1],2018年全国道路交通事故死亡人数为63 194人[2-3],其中汽车对行人造成的伤害占据很大比例,而行人中相当比例的受害者是道路交通的从业人员,比如道路施工、维护、巡查、检测人员,交通运输秩序和法规的检查执法人员等。一般而言,固定的道路设施中为行人设置了红绿灯、斑马线、人行道等;对于随机出现的道路交通路面工作人员,有反光服、临时警示标示物等。这些设施或措施的基本特征是向机动车驾驶员发出注意警示,使其能够采取恰当的操作来避免对行人造成接触或非接触伤害,即主动权都归属于机动车驾驶员,而行人则居于完全被动的状态。此外,当前的智能穿戴设备基本集中在对穿戴者身体健康特征的检测,比如通过瞬时心率判断心脏脉搏的细微差别,从而衡量心脏及相关血管系统的健康状态[4]。如果能构造一种智能穿戴设备,具有可主动探测和识别穿戴者附近道路上的运动车辆并评估其对自己可能造成的撞击伤害风险,使自己获得早期预警,则行人就可获得规避车辆撞击伤害的主动权。
本文提出一种融合雷达传感器模块、蓝牙传输模块、报警模块和安全算法的可主动探测和识别危险并报警的智能可穿戴设备。
雷达传感器可主动探测移动物体的距离和速度等参数;蓝牙模块可将参数传输至APP,APP结合内置安全算法判定该参数的综合效应是否会对参与道路交通人员造成危险,并输出特定值决定是否报警,实现对危险的预知和判断,使穿戴者可以主动进行有效规避。
1 系统硬件设计
1.1 数据传输系统结构
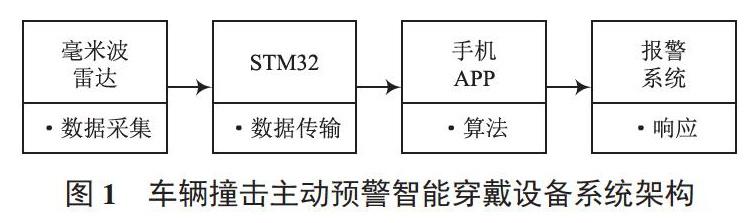
系统架构如图1所示。系统包括四个模块,分别为内置于穿戴设备的毫米波雷达模块,传输雷达数据的蓝牙模块,内置于手机的APP,以及内置于穿戴设备的报警模块。将蓝牙模块配置为STA模式后,智能穿戴设备的数据传输系统即可与手机APP连接,实现信息交互。
数据传输系统包括4个重要组成部分,以下简单介绍它们的基本属性和设计考虑。
(1)主控板:基于具备高性能、高容量STM32F103 ZET6MCU芯片的核心控制板,使用高性能、低成本、低功耗的嵌入式Cortex-M3内核,可以实现信息的实时传输和警报响应。
(2)电源模块:STM32核心控制板工作电压为3.3~5.0 V,在实际研究控制中,可通过内置的电压调节器提供CPU所需的1.8 V电源。当主电源掉电后,通过Vbat(电池电压)脚为实时时钟(RTC)和备份寄存器提供电源。后续使用的蓝牙模块的电源管脚电压范围亦在3.3~5.0 V之间,可以很方便地实现蓝牙通信。
(3)RTC实时时钟:RTC是一个独立的定时器,提供内部实时时钟源。
(4)蜂鸣器模块:采用有源式蜂鸣器,即电磁式蜂鸣器,由直流电压供电。接通3.3 V电源后,振动膜片在电磁线圈和磁铁的相互作用下周期性振动,蜂鸣器发声。电源接通的响应来自手机APP在通过安全算法的运算后发送出的早期预警信号。
1.2 雷达传感器和蓝牙
1.2.1 毫米波雷达模块
CAR28F毫米波雷达拥有独立的操作系统、基带处理设计和模数转换器,工作于24 GHz ISM波段,通信速率为500 Kb/s,可对周围30 m距离范围内的移动物体进行探测,并获得距离、速度和角度等参数,每隔200 ms刷新一次,目标数据将以十六进制形式经USBCAN适配器进行信号转换。
1.2.2 蓝牙模块
毫米波雷达探测的数据通过电平转换后进入STM32主控板,此时与手机APP或蓝牙串口助手配对完成的蓝牙模块将把数据传输至手机APP或蓝牙串口助手,预置安全算法的手机APP将通过算法判断该组数据是否产生危险信号,并将运算值通过蓝牙发送至STM32主控板,与此同时,蓝牙串口助手也会实时显示数据传输信号。
2 数据传输
2.1 雷达与STM32的通信
毫米波雷达接口输出的信号为十六进制形式,包括距离、速度和方位角数据。毫米波雷达与STM32接口均采用RS 232标准接口,如图2所示。2,3和5针脚分别代表接收数据(RXD)、发送数据(TXD)和信号接地(GND),STM32的USART包含TTL电平的串口和RS 232电平的串口,使用公对公直连的RS 232数据线即可实现雷达和STM32的通信。
雷达和STM32采用串行异步全双工通信,串行通信较并行通信具有通信距离远、抗干扰能力强和成本低等优点,同时,异步通信设备要求简单、成本低,全双工通信可以同时收发数据,提高通信效率。
2.2 蓝牙和APP通信
由于STM32无法支持蓝牙功能,因此借助串口转蓝牙模块可以使STM32具备蓝牙通信功能。调试程序,将蓝牙模块的串口波特率和STM32的串口波特率设置为同一数值,STM32从雷达接收到的数据可通过蓝牙模块发送出去,STM32串口的初始化流程如图3所示。
同时,作为接收端的手机APP选用Android操作系统,支持蓝牙传输协议。本机使用的Android 7.0提供了BlueZ的RFCOMM协议封装,利用该协议可完成Android设备与蓝牙设备之间的串口通信[5],蓝牙通信流程如图4所示。
