多火灾危险特征信息采集系统设计
2019-01-08,,
,,
(中国船舶重工集团公司第七一三研究所,郑州 450015)
在损管系统中,信息采集系统是底层探测器、消防设备运行状态与上层监控箱之间通信的纽带,起到承上启下的作用。由于各个损管区域中探测器、消防设备数量众多,采集的信息需要高效的整理并发送,才能使工作人员准确、及时得到现场信息,进行操作。
1 系统的构建与设计
多火灾危险特征信息采集系统通过各类型火灾传感器探测子网,对防护区域内布置的温度传感器、压力传感器、烟雾探测器、火焰探测器[1]等报警信号进行采集和处理,同时对各消防设备的运行状态等信息进行采集和处理,并将处理结果上传至安全区域监控子网,保障监控台接收到防护区域火灾危险特征及消防设备状态信息的实时性与可靠性。
在多火灾危险特征信息采集系统中,信息数据可分为传感器总线采集和开关量采集两大部分,其具体功能见图1。
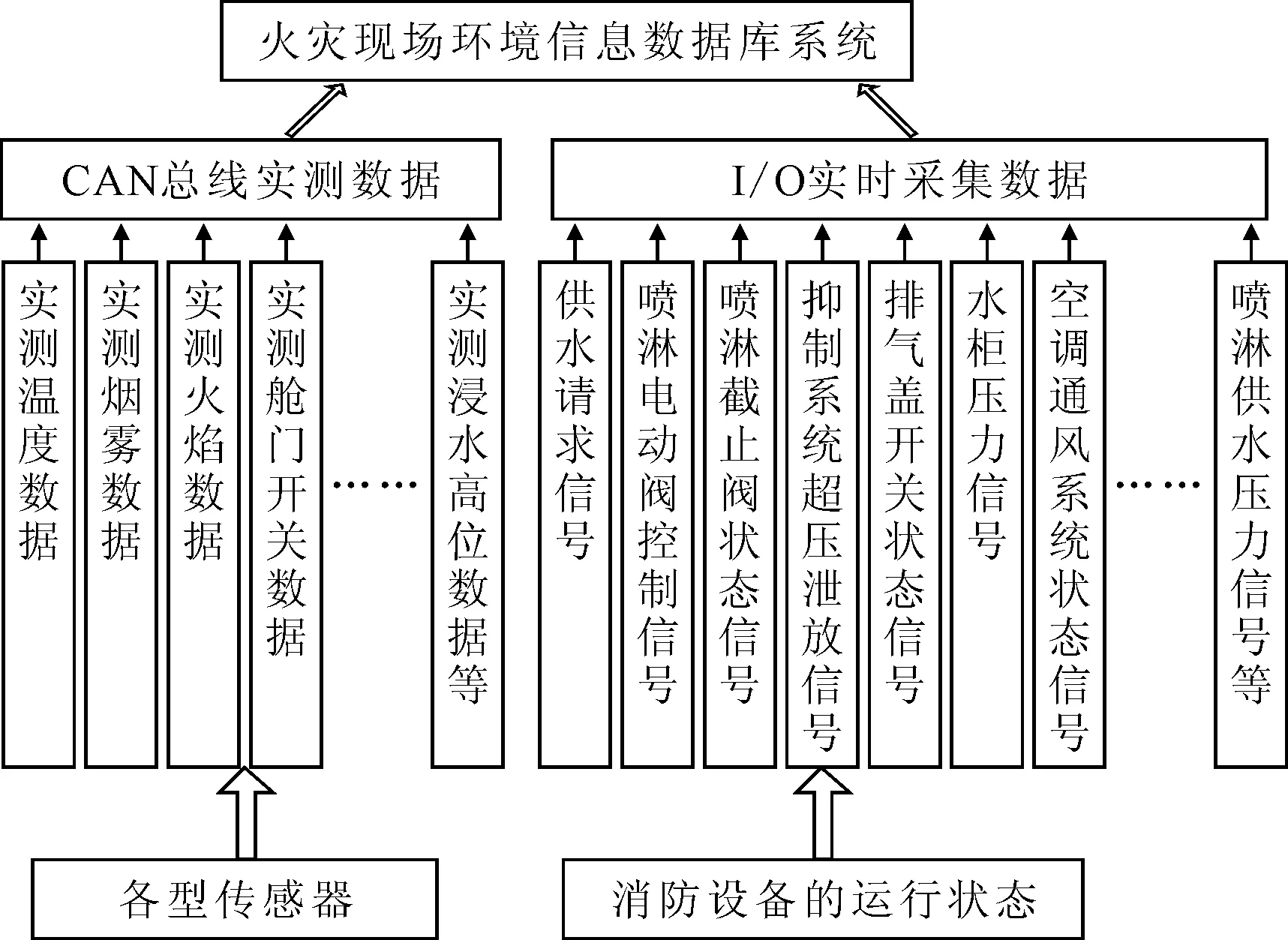
图1 系统功能
由图1中可见,该系统与各类火灾探测器之间的通信采用CAN总线通信,消防设备工作状态等开关量通过I/O进行采集。系统主要完成的功能:
1)对传感器进行供电。
2)通过传感器探测子网,对温度、烟雾、火焰、舱门开关、浸水高位等报警信号进行采集和处理,并将处理结果上传至安全监控区域子网。
3)对防护区域内消防设备的运行状态等进行采集和处理,并将处理结果上传至安全监控区域子网。
4)对接入探测子网的所有传感器进行通信状态检测,判断各传感器的正常、故障与掉线状态。
5)根据指令可点亮面板上相应的指示灯进行报警状态显示。
2 系统硬件设计
根据多火灾危险特征信息采集系统的功能需求,将该系统的硬件分为以下模块进行搭建:中央处理器模块、电源模块、探测总线接口模块、开关量采集模块和通信接口模块,硬件构成见图2。
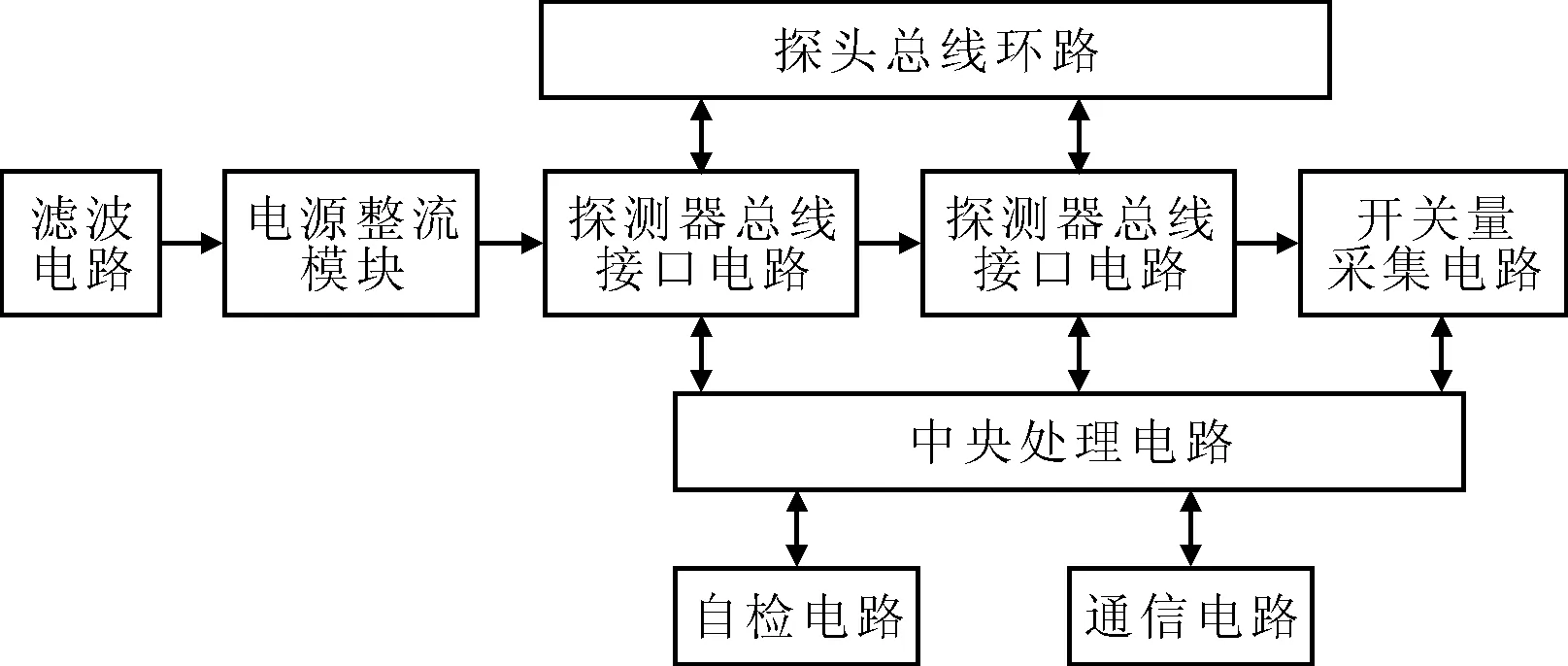
图2 信息采集系统硬件构成
中央处理器模块的设计主要包括SCM9022微处理器以及系统电源,系统时钟电路,复位电路等。探测总线接口模块由双冗余CAN总线组成。开关量采集模块包含96通道基于TTL/CMOS的可编程数字I/O,3个独立的16位、8 MHz计数器/定时器和灵活的中断系统。通信接口模块SysExpanModuleTM/CSD,包含4个光电隔离异步串行口、2个光电隔离非智能CAN-Bus接口和2个Ethernet 接口。
2.1 微处理器
SCM9022是基于Intel® AtomTMN455/D525处理器的超小型嵌入式核心模块。作为Intel的Atom平台,支持667/800 MHz DDR3内存,同时该GPU包含一个更新的第三代图形核心,并支持64位操作系统。SCM9022符合标准PC/104结构尺寸,具有超小体积,超低功耗,抗恶劣环境坚固设计,丰富的功能,支持多种总线扩展,支持VxWorks操作系统,模块功能和结构多样化。板载DDR3 1GB/2GB内存、PATA SSD(2G/4G/8G可选),并提供VGA、单通道LVDS、SATA接口、USB接口、10/100/1000Base-T以太网接口、Audio接口、6串口、PS/2键盘鼠标、GPIO等丰富的IO接口。
2.2 外围电路设计
2.2.1 电源模块设计
主机电源为通用多路模块电源,用于对机箱箱体内部各板卡提供稳定的电源,电源应具有过流、短路、过压保护功能。电源输入为AC220V(±10%)、50 Hz(±5%),功率为0.3 kW;电源输出需满足信息采集箱所有部件和元件所需电源要求,并对与之连接的传感器、截止阀开/关状态I/O有源信号提供电源。
2.2.2 I/O模块设计
单I/O寻址,提供90路开关量输入通道和6路开关量输出通道;具有光电隔离模块,隔离电压1 000 V;支持输入信号最大频率不小于5 kHz;输出最大驱动电流不小于150 mA;板级故障报警。
2.2.3 CAN模块设计
1)具有2路独立CAN接口。
2)支持CAN2.0B协议,通信速率可灵活设置,2个通道可同时独立工作。
3)CAN接口光电隔离。
3 系统软件设计
多火灾危险特征信息采集系统主要在VxWorks操作系统下,基于C语言开发的一个实时性好、性能稳定、移植性高的应用软件。整个系统由bootrom[2]、kernel[3]、文件系统、驱动程序[4-5]、应用程序等组成。
3.1 软件设计流程
设计采用Inter-VxWorks方式,由 VxWorks实时操作系统为嵌入式计算机提供底层软件平台的支持[6]。在信息采集系统的软件设计中采用多任务系统,系统启动后,根据功能需求建立任务,然后启动多任务调度模式,各个任务按照系统调度策略执行[7]。任务按照状态划分为:休眠、就绪、运行、挂起和堵塞[8]。一般,按照优先级与任务需求决定任务的执行顺序。软件主程序流程见图3。
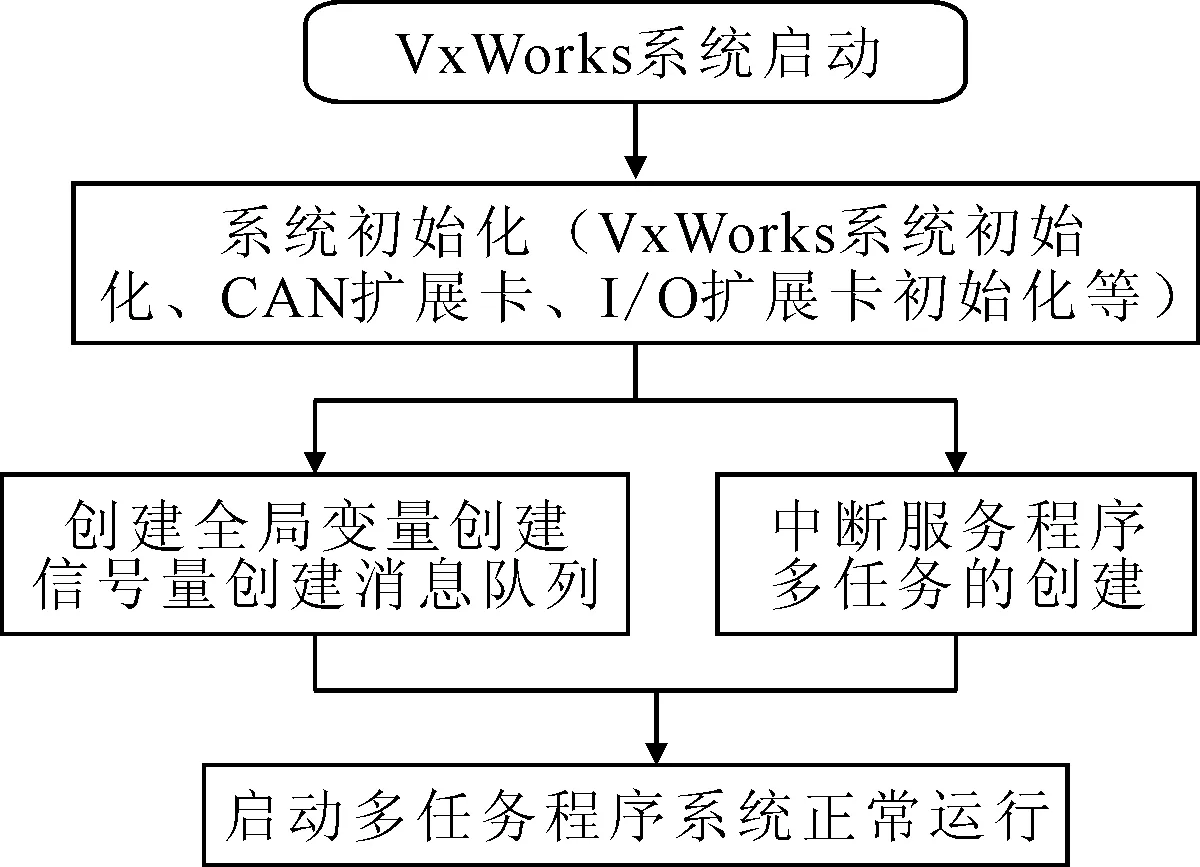
图3 软件主程序流程图
系统启动后,首先初始化VxWorks启动操作系统,对CAN扩展卡[9]、I/O扩展卡进行初始化,然后设定中断服务程序并创建任务,最后进入多任务调度,进入工作状态。
3.2 任务的划分
合理的任务划分能够提高信息采集系统的运行效率、实时性和吞吐量等。在信息采集系统的设计中,遵循如下的任务划分原则。
在时间上,各个任务在执行的过程中所需的周期条件具有不同的频率和时间段;在异步性方面,各个任务具有相对的独立性,依赖的条件没有相互的时间关系;在优先级的确定上,各个任务根据重要性确定不同的优先级;在可维护性方面,各个任务可进行单独的调度,单一任务的出现的错误不影响其他任务。
设计根据功能需求以及以上任务划分原则,将信息采集系统的任务划分如下。
1)探测器巡检任务。Task_pollSensor(),负责对各探测器发送巡检指令,命其上传数据信息。
2)传感器数据采集任务。Task_RecvSensor(),负责通过CAN总线接收探测器上传的数据信息。
3)消防设备状态采集任务。Task_ioDevCheck(),负责通过I/O采集各设备状态信息。
4)信息处理任务。Task_DealData(),对通过探测器和I/O接受的数据进行处理,判断信息类型,然后发送相应信号量通知相应任务处于运行状态。
5)系统与上位机通信任务。Task_SG_Start(),将处理后的数据信息通过CAN总线上传给上位机。
3.3 应用软件结构
多火灾危险特征信息采集系统软件根据不同的功能,划分为以下功能模块:多火灾危险特征采集模块、消防设备状态采集模块、通信状态检测模块、信号处理及上传模块以及报警控制模块。将这些功能模块分配到各个任务中实现系统的整体功能,体现了各个任务之间的运作关系,见图4。

图4 应用任务结构
多火灾危险特征信息采集系统由3级任务组合实现。①由信息采集系统启动入口进入程序并初始化,采用时间片轮转制度来实现探测器检测、消防设备状态检测、报警控制3个并行任务;②进入各自的数据处理子任务,将采集到的探测器、消防设备状态数据进行处理;③按照预定的通信协议完成数据信息的实时上传。
传感器数据采集模块实现了实时采集防护区域内的温度、温度梯度、压力、压力梯度、烟雾、火焰等传感器的监测数据,并解析处理为对应类型传感器的报警状态信号;消防设备状态采集模块实现了防护区域内的消防系统、抑制系统、通风系统等设备实时状态的采集;通信状态检测模块实现了所有传感器的在线、掉线、故障状态的判断,并在主通信线路故障时无间断地切换至备用线路;信号处理及上传模块实现了各类传感器的实时数据、报警状态以及消防设备状态信息的处理,并将处理后的信息按照预定通信协议上传;报警控制模块实现了防护区域的报警状态在设备端的显示与报警提示。
4 功能性能验证
根据多火灾危险特征信息采集系统在硬件、软件方面的设计成果,完成了样机的生产,并通过陆上联调试验,分别验证系统的数据采集效率、大数据量的丢包率、火灾识别判定的准确率、数据上传的实时性等,结果表明,均满足系统功能性能指标要求。
5 结论
以多火灾危险特征信息采集系统作为研究对象,研究VxWorks嵌入式实时操作系统在火灾环境数据采集、处理、控制及通信功能中的应用,实现信息采集系统的实时性、可靠性、准确性等要求。在完成硬件设计的基础上,开发多火灾危险特征信息采集系统的应用软件,目前系统已制成样机并完成联调试验,满足系统功能性能指标要求,系统稳定可靠,可移植性强,可广泛应用于损管系统各类数据的信息采集。
