车辆ABS/EBD/DYC/ESP控制技术
2019-01-04王旭斌
王旭斌
(河南交通职业技术学院汽车学院,河南 郑州 450000)
车辆安全行驶受到许多因素影响。其中,车辆的制动系性能起着首要作用。目前,与制动系相关的安全技术主要有制动防抱死系统ABS(anti-lock braking system)、电子制动力分配系统EBD (electronic brake-force distribution)、直接横摆力矩控制系统DYC(direct yaw moment control)及车辆电子稳定系统ESP(electronic stability program)等。它们大大改善了车辆纵向制动效能或横向稳定性。为突出研究重点,梳理研究思路,本文在说明基本工作原理和研究基础上,对控制策略及关键技术总结说明,给出控制框架。
1 基本原理
ABS的作用是防止制动时车轮抱死,它是通过判断车轮状态,对车轮的制动器制动力调节而实现的;EBD是在ABS硬件基础上,考虑制动时载荷的前移,为了充分利用地面制动力,防止后轮先于前轮抱死,是ABS程序的升级;DYC是在ABS硬件基础上,加装判断车辆稳定状况的传感器,通过判断车辆稳定状况,对某些车轮主动施加制动力而产生所需附加横摆力矩而实现车辆的横向稳定;ESP是综合了ABS、TCS、DYC,通过CAN总线对车辆在转弯、驱动或制动时转向特性需要纠正,以及极限失稳工况下对车辆横向稳定控制。ABS主要适用于车辆紧急制动,满足一定条件时起作用;EBD主要适用轻制动或ABS起作用前,先于ABS;DYC/ESP是在车辆横向不稳定时,其优先于ABS/EBD。
2 控制技术
2.1 控制基础
2.1.1 轮胎模型
无论是制动时ABS/EBD对车轮被动施加制动力或无制动时DYC/ESP主动产生制动力,实质都是对地面纵向制动力和侧向力的控制。地面与轮胎间力的大小和方向受车轮结构及运动状态、地面状况及载荷等影响,轮胎力可采用轮胎模型计算,轮胎模型的类型较多,可根据研究目的选择,常用的半经验轮胎模型已集成于ADAMS、Carsim、veDYNA等车辆模型软件中。从轮胎模型表达式来看,轮胎力可根据模型输入 (滑移率λ、侧偏角α等) 先计算出附着系数u,再与轮胎载荷相乘间接计算出,或根据模型输入(滑移率λ、侧偏角α或载荷Fz等)直接计算,如图1所示[1]。
2.1.2 车辆模型
在开发ABS/EBD/DYC/ESP控制技术时,需根据研究目标建立相应的车辆模型。用于建立车辆模型的软件较多,但为了反映与分析各变量间关系,需建立基于车辆动力学的Simulink车辆模型。用于ABS控制技术的1/4车辆模型 (即车轮模型)及控制过程如图2所示,图中符号含义及动力学方程参见文献[2]。
用于EBD控制技术的1/2车辆模型 (前后模型)及控制过程如图3所示,图中符号含义及动力学方程参见文献[3]。

图1 轮胎力的计算
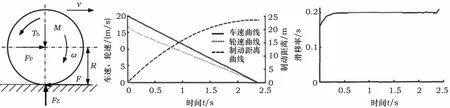
图2 单轮车辆模型及控制过程

图3 前后车辆模型及控制过程
用于车辆稳定性的ABS/EBD/DYC/ESP整车控制技术的八自由度 (4个车轮转动、车身横摆、侧倾、横向及纵向运动)四轮车辆模型,以及用于判断车辆稳定的线性二自由度参考模型如图4所示,图中符号含义及动力学方程参见文献[4]。
2.2 控制策略
控制策略作为控制技术的灵魂,包含控制变量的选择和控制方法的使用,基于制动系的控制框架如图5所示。ABS研究相对成熟,常用的控制变量有轮速、轮加速度或滑移率等;控制方法有门限值法及基于车辆动力学模型运用控制理论 (PID、模糊、自适应、模型预测、最优、鲁棒等)的控制方法。EBD的控制更多采用门限值法,运用stateflow状态流程图实现,主要有3种[5]:一是根据前后轮的滑移率进行控制,二是根据前后轮轮速进行控制,三根据后轮减速度或后轮轮速与参考车速进行控制;也有运用控制理论对其进行研究的[6]。
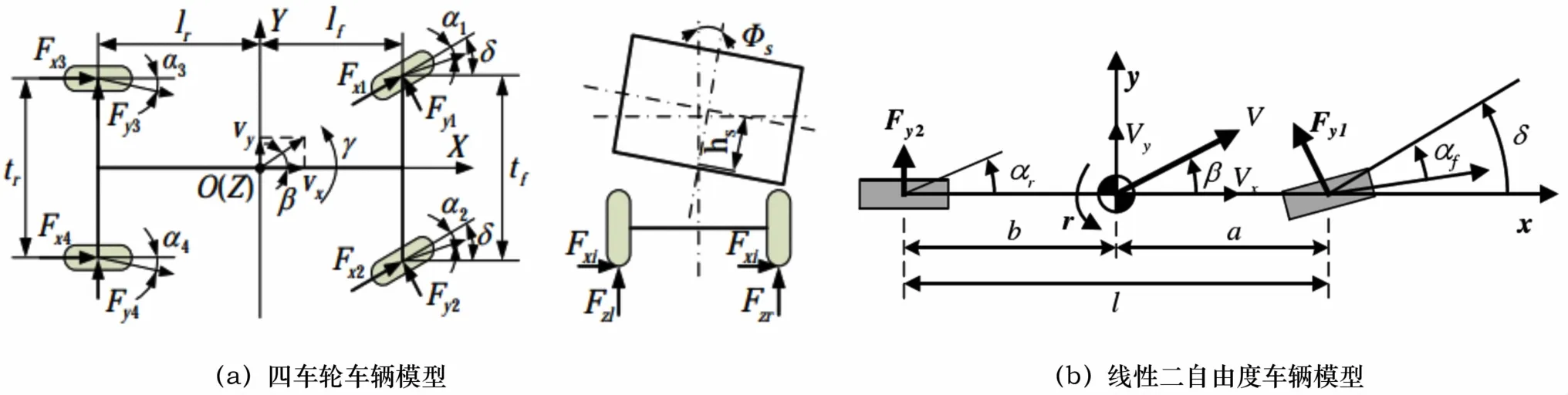
图4 整车模型及参考模型
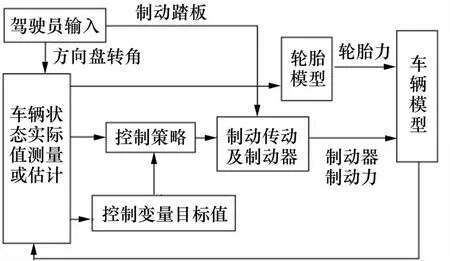
图5 基于制动系的控制框架
DYC/ESP稳定性控制策略采用分层控制,经过动力学控制层计算出所需附加力矩后,需要将其通过控制分配层转换成对执行系统的需求,最终通过执行层实现[7]。大都选取横摆角速度和质心侧偏角作为控制变量,当质心侧偏角较小时,用横摆角速度来判断车辆的不足转向和过度转向;当质心侧偏角较大时,用质心侧偏角来判断车辆的过度转向质心侧偏角的控制准则[8]。通常将线性二自由度车辆的稳态转向特性作为横摆角速度对汽车稳定性的理想表征。其控制理论的应用,也由一般控制、最优控制、自适应控制,发展到滑模变结构控制以及模糊控制和人工神经网络控制等。
控制策略的输出量可以直接是制动压力或制动力矩,或是考虑包含电磁阀特性的液压传递机构而输出压力控制脉冲信号PWM。
ABS/EBD/DYC/ESP控制技术受初始车速、路面 (低附着、高附着、对开及对接等)、对车辆的操纵 (转弯)、制动强度 (轻制动及紧急制动)、车轮载荷、轮胎模型的选择、特殊或极限状况以及制动系统的非线性特性和外界干扰等影响[9],这些都是控制策略的开发内容,也是重点和难点。其中,转向制动车辆处于极限状态下的控制成为研究的热点。应用于电动汽车采用线控技术的电液制动EHB(electro hydraulic brake) 系统及电制动EMB (electro mechanical brake) 系统融合了ABS/EBD/DYC/ESP技术,需协调与再生制动的控制。
2.3 关键技术
从轮胎模型和控制框图可看出,控制策略的实现是以轮胎、车辆、路面状态参数这些关键技术为前提的。在一定的精度范围内,车轮的角速度可由轮速传感器测出计算,车辆的横摆角速度可由横摆传感器测出计算,车辆纵向及横向加速度也可由加速度传感器测出计算;而车辆的速度、最佳滑移率、质心侧偏角及附着系数大都采用基于车辆动力学或运动学来估计[10];控制方法中参变量的确定:门限值更多采用试验方法,稳定域边界采用相平面法[11],更多参变量采用遗传算法、自学习、模糊自整定等现代控制理论优化或估计以及工程上通过标定试验给出。电动汽车可充分利用驱动力矩和制动压力已知的优势,简化对质心侧偏角和路面摩擦系数估计算法,提高估计精度。
ABS/EBD/DYC/ESP控制技术都是基于车辆制动系统,但控制的目的和作用域不同,如何优先及过度协调控制[12],使得纵向制动效能较好,又使得车辆稳定。另外,车辆纵向、侧向及垂向动力学是相关耦合的,随着车辆性能要求的提高,综合考虑车辆各向性能的集成控制技术已应用车辆中,如何兼顾各项性能,划分各控制区域或集成策略也成为研究的方向。
3 总结
ABS/EBD/DYC/ESP控制技术提高了车辆的制动效能和侧向稳定性,采用轮胎模型和基于车辆动力学的车辆模型用于ABS/EBD/DYC/ESP控制技术的开发有利于分析结构参数、动力学参数、控制参数等与运动状态和车辆性能关系;不同控制技术下的控制策略研究应选用相应的轮胎模型和车辆模型;控制策略包含控制变量的选择和控制方法的选用,车辆或路面状态参数实际值估计、目标值确定及控制参数整定是控制策略实现的关键技术;ABS/EBD/DYC/ESP控制技术对车辆工况的适应性和对干扰的鲁棒性及集成协调策略是研究的难点;电动汽车复合制动系统为ABS/EBD/DYC/ESP研究带来了新的研究热点。
