点云在老旧仓库结构检测中的应用研究
2019-01-03沈恒旭
沈恒旭
(天津市北洋水运水利勘察设计研究院有限公司,天津 300452)
1 引 言
点云技术作为国际上新发展起来的高新技术,以其采样点速率高、定位精度高、无接触测量等独特优点,已被广泛应用于考古测量、地形测景、矿区土方开挖断面和体积测量、历史古迹的调查与恢复以及特殊动画效果的测量等[1,2]。以往结构检测中的结构检测往往借助于百分表、水准仪和铅锤等检测设备检测结构体的特定点或者局部区域的变化,并据此对结构整体变形做出相应评判,这种检测方式以点代面、以局部代整体,所得结果较为抽象,不能全面、直观地反映结构体的变形情况。点云技术通过三维激光扫描[3]、点云数据去噪和配准[4]、特征对比分析[5]等技术能够获得结构体全面的、立体的、直观的结构变形情况,较以往的检测方式有质的提升。
点云技术自问世伊始便受到了国内外众多专家的关注,随着该技术逐渐成熟,该技术的应用领域也逐渐得到推广。在桥梁变形监测[6]、大型钢结构建筑物健康监测[7],大坝变形监测[8],高层建筑物健康检测[9],隧道变形监测[10]等方面点云技术的应用取得了一定的成就。本文以点云技术为手段,将该技术应用到结构体的变形检测中,通过采集数据处理获得结构体的整体变化情况。
2 结构检测原理及检测技术路线
点云技术在结构体检测中的应用过程如图1所示,其中重要的部分主要是数据获取、数据处理和结果分析三个部分。

图1 结构体检测技术路线
结合结构检测技术路线图,在数据获取、数据处理和结果分析三个方面对点云技术在结构检测中的应用原理进行阐述。
2.1 点云数据获取
在数据获取过程中,主要使用检测设备MS60三维激光扫描仪,MS60主要由测距模块、多角镜面转轮、驱动马达、角圆码盘以及一些马达驱动电子器件组成。其主要技术参数如表1所示

LeicaMS60全站扫描仪主要技术参数 表1
在能够较好观测结构体检测面的位置设置模拟观测基站,在扫描仪的屏幕中选取合适的扫描范围,设置相应的扫描间隔和扫描距离,通过仪器自动扫描完成数据采集。
在数据处理过程中,点云数据去噪和点云数据配准的优劣直接决定后期结果分析的准确性。
2.2 点云数据去噪
点云数据去噪首先通过获取的点云数据进行平面拟合,以各点至拟合平面的距离为评判标准,删除超出评判准则的点,以此来实现点云数据去噪。点云数据平面拟合去噪主要包括最小二乘法[11]、特征值法[12]以及二维正交整体最小二乘方法[13]等。本文运用三维正交整体最小二乘法对采集得到的点云数据进行去噪。
首先建立点云数据的三维模型:

(1)
式中,a、b、c为拟合平面待求参数;
构造矩阵M,计算MTM。M形式为:
(2)
对MTM进行特征值分解,a、b、c取值即为所得特征值中最小值所对应的特征向量。
计算点云数据到拟合平面的距离:
(3)
(4)
判断di与δ的关系,当di>δ,则删除di对应的坐标点,如果di≤δ,则保留对应坐标点。
2.3 点云数据配准
点云数据配准算法中基于欧式距离的ICP(iterative closest points)算法[14]和基于栅格化的NDT(normal distribution transform)算法[15]是两种传统的算法,由于3DICP和NDT算法都需要对点云数据进行多次的迭代,导致运算时间较长,效率较低[16]。基于此为了提高运算效率缩短运算时长,本文运用基于霍夫变换(Hough transform)[17]方法进行点云平面特征的提取。
霍夫变换通过公式:
(11)

(12)
其中,θ∈[0,2π)为该法向量与x轴的夹角,φ∈[0,π]为该法向量与z轴的夹角。
通过迭代运算,可以求出参数空间中的极值点,即为点云中的平面。
经过点云数据去噪和配准后,根据点云数据中对应结构体的固定点建立模拟平面,将点云数据与模拟平面进行对比分析,得到以点云中点到平面的距离为基础的平面彩色分布图,根据点云的颜色变化即可判断结构体检测平面的变形情况,选取点云中的点也可定量分析局部区域的变形情况。
3 老旧仓库结构梁及墙面垂直度检测应用分析
本文涉及的老旧仓库始建于20世纪70、80年代,梁主要为混凝土结构梁,墙面主要为砖混结构。由于建造年代久远,混凝土结构梁受房顶压力、梁身自重等影响出现一定程度的变形。根据《混凝土结构工程施工质量验收规范》GB 50204-2015中的相关规定,混凝土结构梁的变形范围为 ±10 mm。混凝土结构梁长 23.8 m,高 7.5 m。由于结构梁位于仓库顶部,不存在可供攀爬的设施,无法在结构梁上安装测量设备。结合现场情况,使用MS60全站扫描仪对结构梁进行扫描,获得相应点云数据如图2所示。

图2 混凝土结构梁点云图
对该点云数据运用三维正交整体最小二乘法进行去噪处理,并运用霍夫变换法对该点云数据进行配准,得到图3所示的结构梁底面点云数据。

图3 混凝土梁底面点云图
由于混凝土结构梁的两端各有混凝土柱作为支撑,据此可以以混凝土结构梁两端为相对不变的定点建立模拟平面,如图4所示。

图4 混凝土梁底面模拟平面图
将模拟平面与底面点云数据进行对比检测,以点到平面的距离为基础对点云数据进行着色,可得如图5所示混凝土梁底面彩色图。

图5 混凝土梁底面对比彩色图
如图5所示,图例颜色由深蓝色逐渐过渡到红色,其中浅蓝色至深蓝色代表负值,表示点云中的点位于模拟平面以下;浅绿色至红色为正值,其越接近红色代表值越大,表示点云中的点位于模拟平面以上。通过彩色图可以清晰地看出该混凝土结构梁存在轻微的变形,变形主要集中在结构梁的中部和靠近两端的位置,其中中部主要为下凹变形,两端主要为上凸变形。
对图5所示平面进行定量分析可得如图6所示特征点图及表2特征点偏差表。
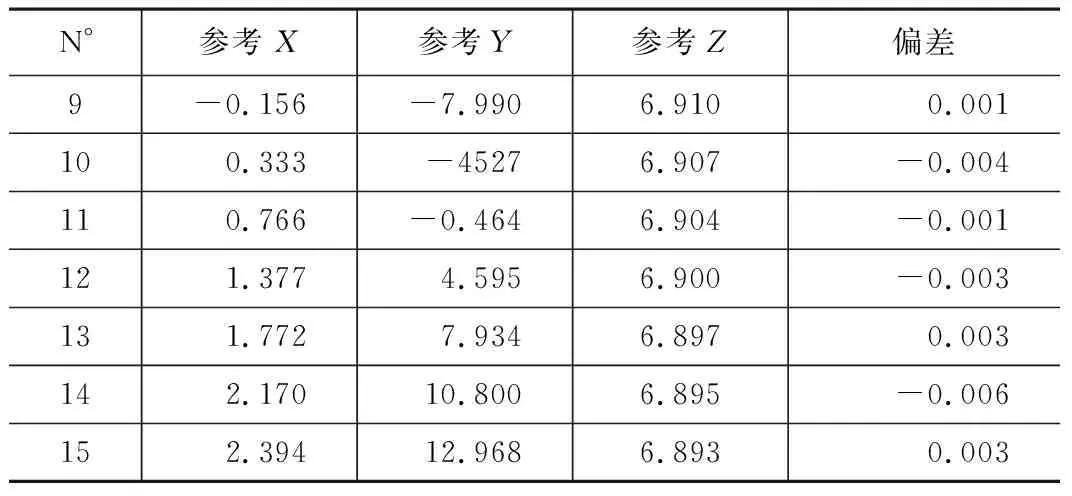
特征点偏差表 表2
通过图6和表2,可以看出该混凝土结构梁的最大下凹变形为 6 mm,最大上凸变形为 3 mm,其中最大上凸变形和最大下凹变形均出现在梁的北端。
4 结论及建议
通过上述讨论分析,点云技术以其测量距离远、采样点速率高、点定位精度高等优势使得结构检测相对于以往的检测方法不仅可以提高检测效率而且能够客观全面地反映被检测结构体的整体变形,避免了只测量局部而导致的以点代面、以局部代整体的情况。
虽然点云技术在结构检测行业的应用具有一定的优势,但是在数据采集方面,数据质量要求较高;在数据处理方面,点云数据的配准、去噪及模拟对比平面的选取等技术还需要进一步的研究。
