WR技术的发展与应用
2019-01-03彭程锦李世光
彭程锦 杨 军 张 明 李世光
(1.北京无线电计量测试研究所,北京100039;2.中国航天科工集团第二研究院研究生院,北京100039; 3.计量与校准技术重点实验室,北京100039)
1 引 言
白兔技术(WR)是欧洲核子研究中心(CERN)和德国重离子研究中心(GSI)共同提出并发明的一项技术,旨在解决大型对撞机中由于时间传递精度过低而导致的误差问题。对作为一项提出不过10年的新技术,如今WR现在不止作为粒子加速器和对撞机等科学基础设施的主要时间提供者系统,更因为其长距离、多节点和高精度的巨大优势使之可应用于较长距离的多节点时间传递上,如在大型高空空气簇射天文台的探测器阵列中对簇射粒子的到达时间进行测量;或在通信、智能电网或金融等不同的分布场景下部署这种同步协议,像5G通信等。
2 WR技术由来
2.1 时间同步
物理学家一直都十分重视“时间”的重要性,多年来已经发明了各种测量时间的方法。从简单的天文观测(日晷、测星仪)到复杂的量子效应(原子钟),科学家一直都在为开发更精确的时钟而努力。2010年2月,由美国国家标准局研制的铝离子光钟已达到37亿年误差不超过1s的惊人水平,成为世界上最准的原子钟[1]。这种精度在许多应用中至关重要,例如保存国家计量实验室时标。
不过,这些极为精确的时钟非常昂贵、脆弱,并且体积庞大,所以许多实际应用中并不常见。由晶体振荡器产生的时钟已经可以应用到生活中的大多数电子产品上。但在许多其它需要同步通信或协同全局时间来同步工作的领域(分布式仪器)中,这些彼此互不相连且自由运行的时钟就无法使用了。虽然设计人员可通过安装较好的晶振来局部解决该问题,但在总体上并没有解决时间的同步,即便存在微小的频率偏差,也会让这种方法失效。
如果在大规模网络分布上都使用高精度时钟(如芯片级原子钟),成本太高。在这些情况下,最好的解决方法就是用少量的高精度时钟将时钟信息从基准时钟(高稳定、一般价格昂贵)分配给网络中其它需要准确同步的从时钟部分。问题是如何才能做到?
2.2 网络时间同步的诞生—网络时间协议(Network Time Protocol,NTP)
NTP技术作为该问题的解决办法于1988年6月提出。NTP是使网络中的各个计算机时间同步的一种协议[2]。它的用途是将精密的时钟信息(世界协调时UTC)同步到各计算机中,在局域网内其精度可达0.1ms,在互联网上绝大多数的地方其精度可以达到 1ms~50ms[3]。它可以使计算机对其服务器或时钟源进行时间同步,并提供高精准度的时间校正。
在NTP中规定了时间按照服务器的等级传播,以离外部UTC源远近将所有的服务器分成不同的Stratum(层级),但层级总数一般不大于16层。如图1所示,Stratum-1的NTP服务器一般直接通过GPS(Global Positioning System,全球定位系统)获得标准时间,而下一层级Stratum-2则从Stratum-1中获取时间信息,所有这些服务器在逻辑上形成阶梯式的架构相互连接,而Stratum-1的时间服务器是整个系统的基础[4]。
2.3 WR的前身—精密时间协议(Picture Transfer Protocol,PTP)
网络时间协议NTP自1988年被提出以来沿用至今,在一些不需要高精度时间的场所,如个人电脑上提供误差在亚毫秒级到毫秒级的时钟。在日益增强的对高精度时钟的需求下,PTP(又称IEEE 1588协议[5])于 2002年发布,在 2008年发布第二版,该协议相比于NTP,由于时间戳通过物理层发送,精度提升至亚微秒级(<1μs)。
即使如此,PTP也有其难以克服的缺点,其局限性主要体现在以下三方面:
1)所有节点的时钟都是独立运行的,各自的振荡器频率存在一定偏差,为了避免主从节点出现较大的时间偏差,同步报文交换的频率必须足够高以及时补偿偏差,这给通讯链路带来了较大的负荷。
2)时间戳的分辨力会导致主从时钟时间信息的偏差。
3)PTP假定主从往返链路是完全对称的,未考虑传输介质的非对称性[6]。
WR技术是基于PTP协议之上,运用各种手段克服以上三点局限性,将PTP无法跨越的8ns误差(传输频率最高为125MHz,所以最小周期为8ns)缩短至亚纳秒级(<1ns),以基于802.3标准的千兆以太网技术,可满足大部分科学实验对于时间精度的要求[7]。
2.4 WR的提出
CERN的大型强子对撞机(Large Hadron Collider,LHC)要求传感器和执行器具有非常高的定时精度,以协作完成对粒子束流的监测和控制[8]。然而该系统存在两方面的局限性:一、基于单向的时间消息分发导致系统无法测量路径的传输延时,因而无法对路径延时的变化做自动补偿和校正,不得不采用手动标定的方式;二、目前的总线带宽仅为500kbps,只能勉强满足定时功能的需求,而控制命令和监控消息的传输需要额外增加链路。
基于此,2006年,CERN开始考虑更新LHC的时钟系统[9]。与此同时,GSI也在考虑其反质子与离子加速器中心(Facility for Antiproton and Ion Research,FAIR)的时钟系统的设计,而两者对于时钟系统的性能需求有很高的契合度,因此,CERN和GSI于2008年提出了一种基于标准以太网的亚纳秒时钟同步技术White Rabbit(WR)[10]。WR节点传输框架如图2所示,其技术支持多节点(>1000)、长距离(10km)的频率分布和时间同步,旨在实现优于100ps的抖动和亚纳秒级的偏差[11]。
该“White Rabbit”的名字来源于《爱丽丝梦游仙境》中,那只永远担心要迟到,永远急急忙忙地赶时间的白兔先生,为以示时间的宝贵而取其作为该项目的吉祥物如图3所示。
图2 WR节点传输框架图Fig.2 WR node transmission framework diagram
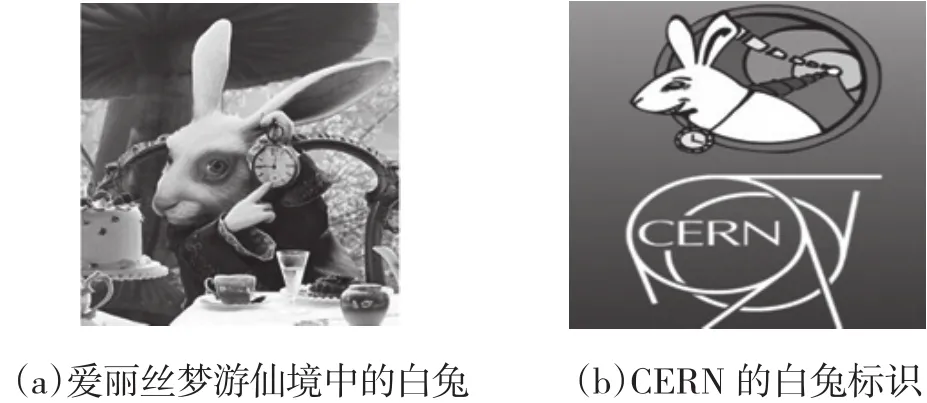
图3 White Rabbit的原型与WR技术如今的标识Fig.3 White Rabbit's prototype and WR technology today's logo
3 WR的原理
WR技术起源于电信技术,其中频率通过分级通信时钟恢复来调整。然而,为了调整绝对时间,需要第二套协议。在WR技术中,第二套协议是IEEE 1588协议,但该协议不能在同步中提供足够好的相位分辨力。
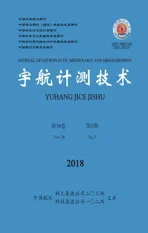
此外,为了避免CERN加速器轨道中高能场的电磁干扰,WR选择了光传输。整个系统结构的概述如图4所示。
整个WR网络被分层,并且将时间和频率信息从主时钟向下传播到大量节点。主时钟与GPS或原子钟同步,中间的WR交换机(White Rabbit switch)类似于PTP协议中定义的边界时钟(boundary clock),一方面作为从时钟与上级时钟进行同步(上级时钟可以是全局主时钟也可以是WR交换机);另一方面作为主时钟与下级时钟进行同步(下级时钟可以是WR交换机也可以是WR节点)[7]。
在WR网络中,除了主时钟节点外的所有节点都以其上级节点为参考源进行同步过程。时钟同步过程包括三部分:一是时钟频率同步;二是时间戳的同步;三是时间戳相位的同步。其中同步以太网技术(SyncE)完成了时钟频率分布,而精密时间协议(PTP)和数字双混频时差法(DDMTD)完成对时间戳及其相位的同步。对于高精度节点,运用光纤传输千兆以太网,由于链路上的不对称性可以被计算,因此需要进行高精度延迟补偿计算[7,12]。
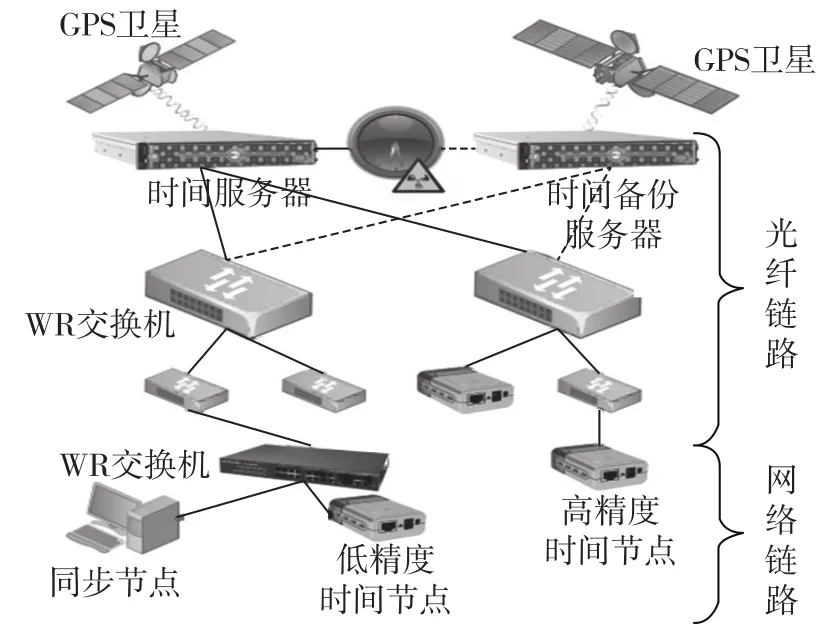
图4 WR系统结构Fig.4 System structure of WR
3.1 利其器——频率同步:同步以太网技术(SyncE)
同步以太网技术是在PTP进行同步之前,对主从时钟的频率提前进行同步的一项技术,现在一些PTP网卡,诸如AR8031,在支持PTP传输的同时也支持SyncE,用户可根据需要自行设置。
同步以太网(SyncE)是实现WR时间传递的基础。同步以太网是一种采用以太网链路码流恢复时钟的技术。标准以太网和同步以太网的对比如图5所示。在标准以太网中,各个节点的时钟都是利用本地晶振独立运行的。而在同步以太网中,所有节点构成一个时钟网络拓扑结构,子节点或子交换机利用时钟恢复技术从数据链路中恢复出时钟,这样整个网络的所有节点的时钟频率都与主节点时钟频率精确同步[10]。
3.2 善其事——时间同步:精密时间协议(PTP)
PTP对于NTP的优越性在于时钟信息由主从时钟间的信息包传递,每一次对时都将信息包中的发出和接收时间进行记录,并收集各时间标签。通过时间标签,从时钟就可以计算出自己与主时钟的时间偏差以及传输延迟,从而进行时间的校准同步。
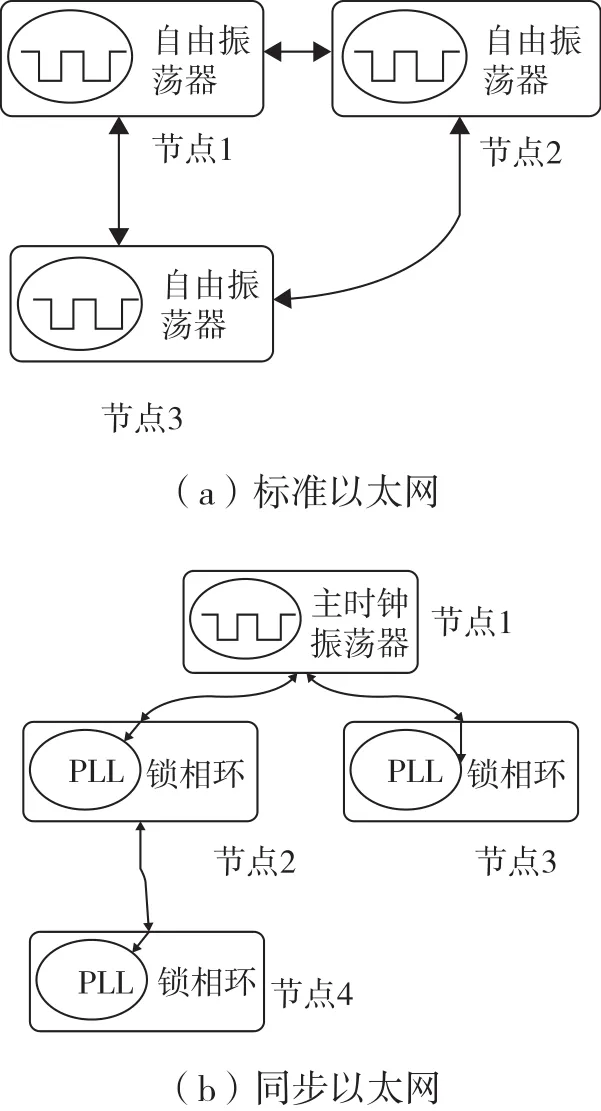
图5 标准以太网和同步以太网的对比Fig.5 Comparison between standard ethernet and synchronom ethernet
PTP协议中包含了4种信息包:同步信息包Sync、带有Sync时间戳信息的Follow_Up、延时测量信息包Delay_Req和Delay_Req的延时应答包Delay_Resp。一些性能较好的PHY可以实现在发送Sync的同时加入时间戳,这样可以把Sync与Follow_Up合并成一步。同步过程如图6所示,主时钟发送Sync,记录发送时刻t1,并让Follow_Up信息包记录此时间发送给从时钟,从时钟接收到Sync的时刻记录为t2;过一小段时间,从时钟发送Delay_Req并记录发送时间t3,主时钟接收到Delay_Req后记录接收时间t4,并将t4经由Delay_Resp返回给从时钟[10]。
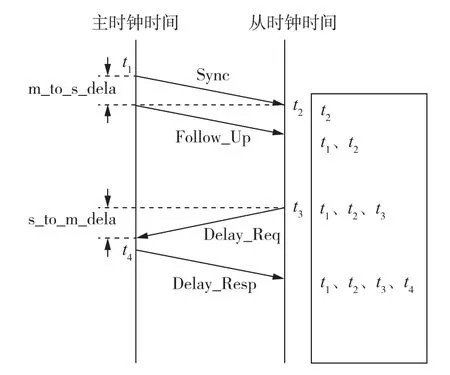
图6 PTP的基本原理Fig.6 Basic principle of PTP
3.3 工乃精——相位同步:数字双混频时差(DDMTD)法
数字双混频时差(Digital Dual Mixer Time Difference,DDMTD)测量是WR协议能够达到亚纳秒级精度的根本技术。数字双混频时差测量的结构图如图7所示。
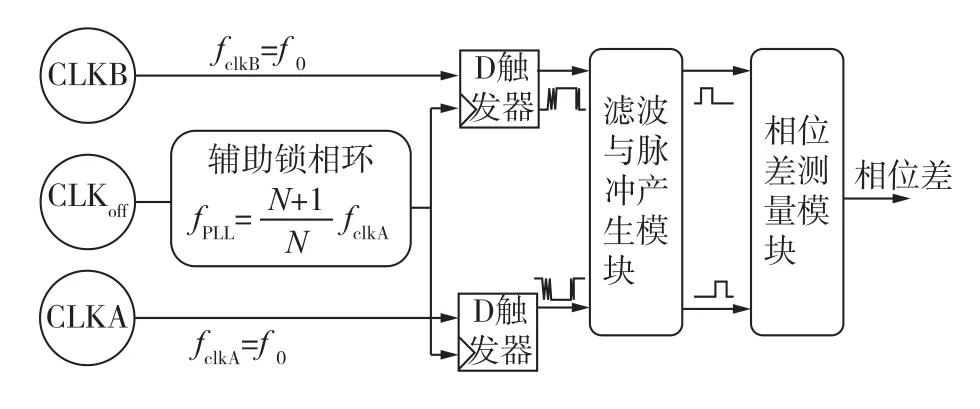
图7 数字双混频时差测量结构图Fig.7 Structure diagram of DDMTD
数字信号输入为方波信号,运用D触发器代替混频器进行混频,时钟CLKA或CLKB输入的测试信号与偏置时钟CLKoff进行混频,其中CLKA与CLKB的时钟频率等于f0,CLKoff的时钟频率为偏置时钟CLKoff的作用是将A、B两个时钟之间极小的相位差放大N倍,方便测量,这一原理与游标卡尺非常类似[10]。
根据数学运算,数字双混频时差法的测量分辨力为:
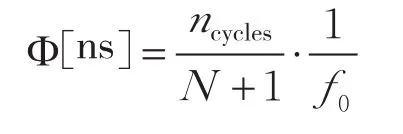
式中:ncycles——该系统输出的相差周期个数。
通过DDMTD得到t2、t4的精细时间戳后得到t2p、t4p,带入式(1)、式(2)进行计算,得出主从时钟的传输延迟delayms和时钟偏移offsetns为:
3.4 WR同步流程
WR网络主从时钟同步流程可分为初始化同步和相位跟踪两个过程。如图8所示[13],初始化同步过程计算offsetms和phases的值,并利用phases对时钟偏移进行补偿,完成主从间的同步。相位跟踪过程随时监视着phasemm的变化,并针对性的调节相位补偿量phases,从而保持主从时钟间的持续高精度时间同步。
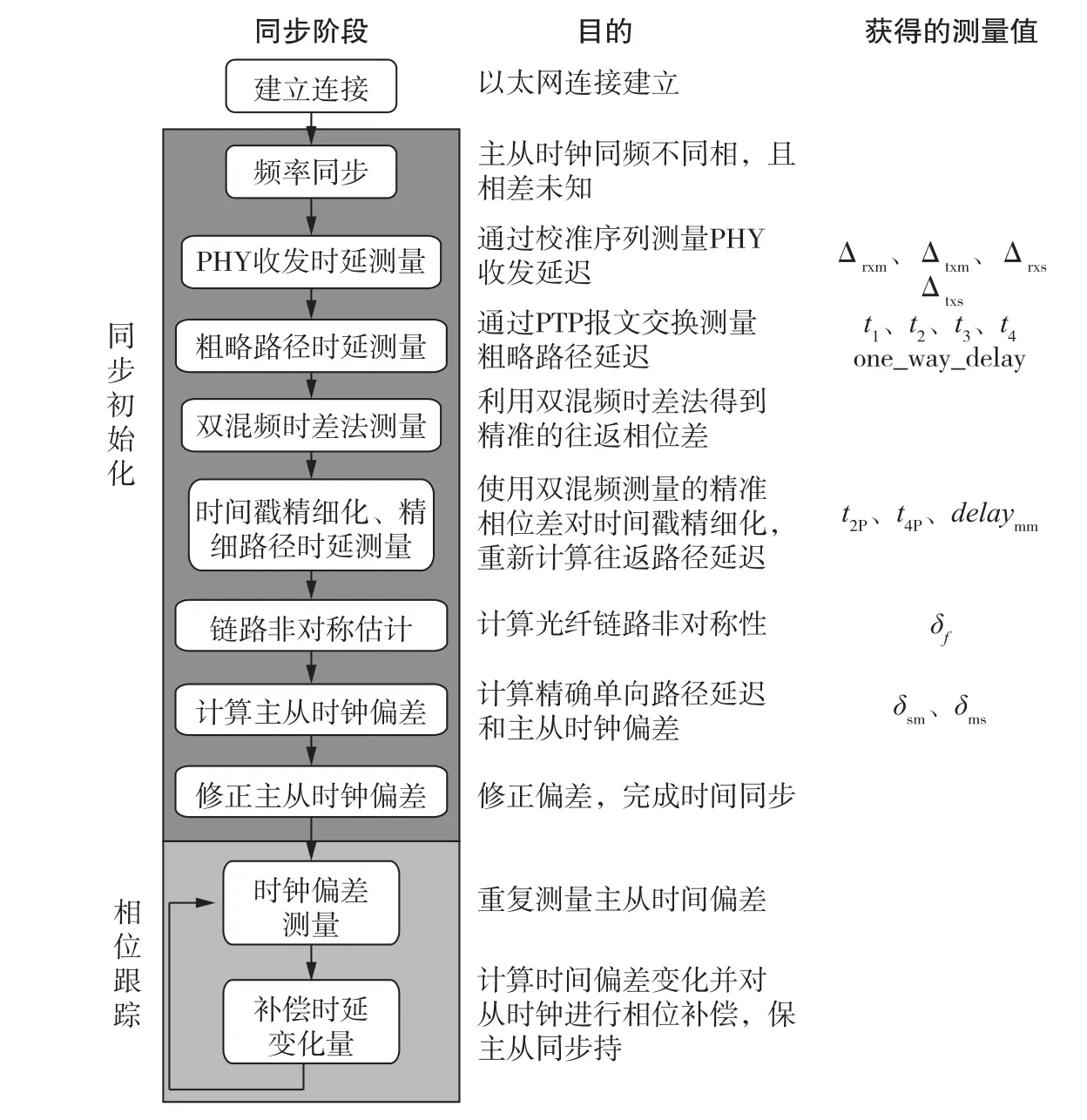
图8 WR具体同步流程Fig.8 WR specific synchronization flow
3.5 为什么要使用WR——WR的优点
市场上虽然已经存在其他能够带来精确定时和高同步的解决方案,但是大多数都存在功能有限或者不标准的问题,而WR技术被认为是一项长期而稳定的解决方案。
1)WR和SPEC使用FPGA进行控制,因此它们的硬件可以很容易地重新编程;
2)因为WR标准模块是按照“开放式硬件”设计的,技术人员可以自由地改进或重新设计电路板;
3)WR协议是由CERN提出的,这是科研领域中最好的科学机构之一,CERN的参与意味着整个WR的耐用性和质量;
4)WR中的所有元素都尽可能被设计成模块化,以降低维护和升级的成本;
5)WR可以混合其他网络,WR交换机可以用作普通交换机直接连接到PC,以便快速地连接到网络中。如果不需要WR协议的特定功能,则不需要使用特定的网卡。如果只需要毫秒精度,使用者也可以仅使用WR中的PTP功能;
6)WR协议是开放的,可以在此之上扩展其他协议,如IEEE 1588或SyncE。
4 WR的硬件组成
本文以一款通用的WR时钟节点(Compact Universal Timing Endpoint based on the White Rabbit)为例进行对 WR 的硬件介绍[6,11]。CUTEWR是一款符合FMC规范(FPGA Mezzanine Card Stadard,FPGA中间层板卡)的通用子卡,可以通过FMC接插件与母板集成。这种基于FMC规范的设计架构相对于传统的单板设计方式具有更高的灵活性和通用性。用户在不改变母板硬件和大部分功能设计的情况下,通过加载不同类型的通用FMC子卡(ADC、TDC、DAC等)实现特定的系统功能[10]。
CUTE-WR的硬件设计如图9所示。分为以下四个部分。
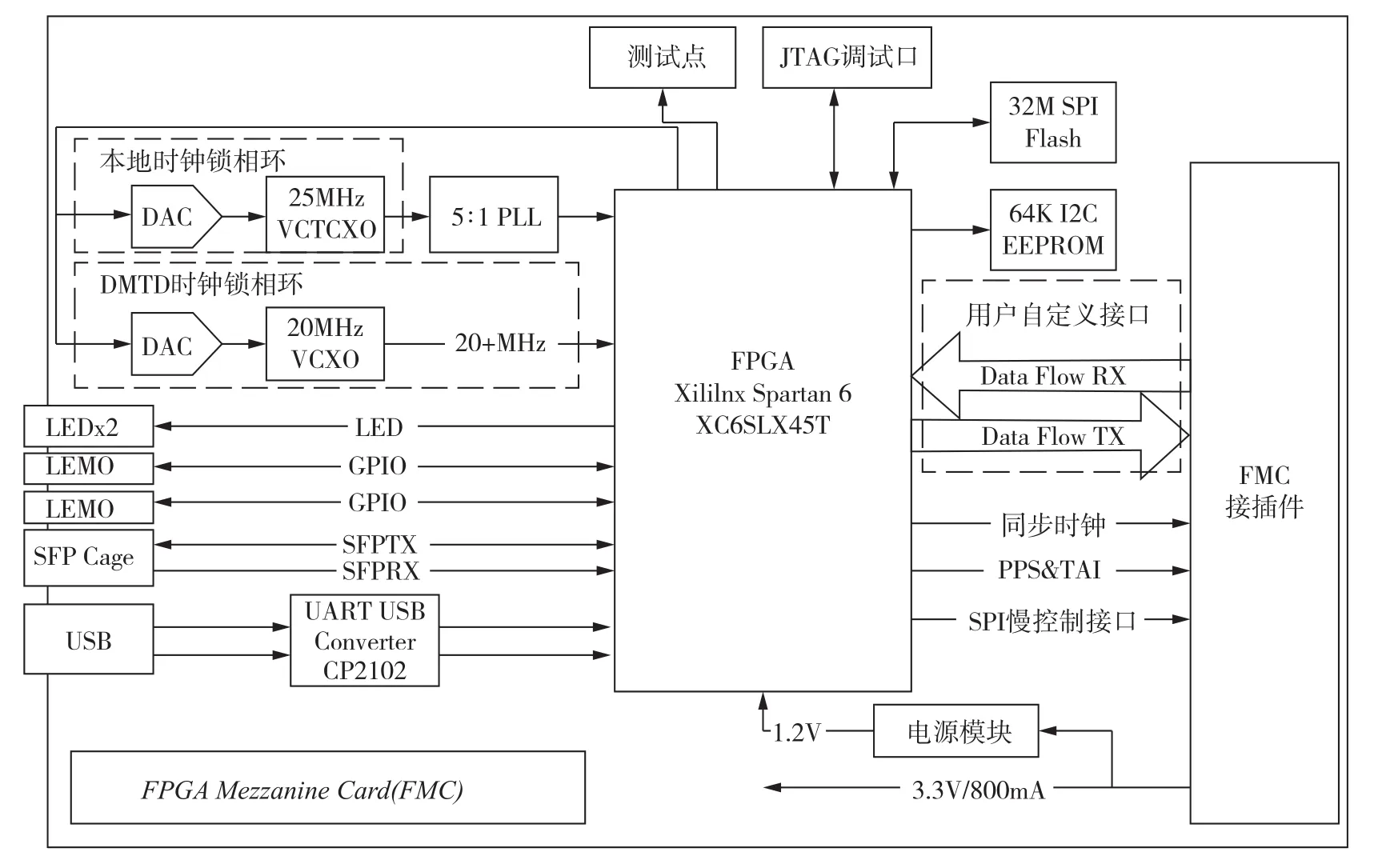
图9 WR核心电路板块Fig.9 WR core circuit board
1)Xilinx公司的Spartan6FPGA作为最核心的部件完成时钟同步和数据传输等逻辑功能;
2)由FPGA内部逻辑实现的DDMTD鉴相器、PI控制器和外部DAC芯片以及25MHz的压控振荡器构成了CUTE-WR本地时钟的锁相环电路,FPGA通过调节DAC的输入参数完成本地时钟的相位锁定和相位补偿功能;
3)时钟通过一块外部锁相环芯片倍频至125MHz,并扇出至FPGA专用时钟输入引脚和GTP模块的时钟输入引脚;另一通道的DAC和20MHz压控振荡器构成了DDMTD参考时钟的锁相环电路;
4)SFP接口,FPGA的GTP模块的高速串行收发电路通过它与光电收发器连接。
这些构成了WR子节点的基本电路。CUTEWR还使用32MbFlash和64KbEEPROM分别存储FPGA固件和CUTE-WR的相关配置参数,包括工作模式、硬件延时参数、光纤非对称系数和IP地址等。此外,CUTE-WR还带有两个SMA/LEMO接口的通用IO、用于本地调试和配置的USB接口、四个LED指示灯以及FMC接插件。FMCLPC(Low Pin Count)连接器共有160个引脚,除了定义电源、JTAG接口外,还提供了超过30对通用差分信号,每对差分信号也可当作两路单端信号使用,传输速率高达2Gbps。
5 WR的科学应用
高精度时间分配用的最多要求最为严格的地方莫过于科研机构了。加速器、大型射电天文分布式设施、宇宙射线探测器,所有这些离不开对时间与频率的超高精度分配。
5.1 加速器、同步加速器和散裂源:
5.1.1 CSNS(The China Spallation Neutron Source)
CSNS是一种基于加速器的脉冲散裂中子源,位于中国南方,其鸟瞰图如图10所示。作为研究材料微观结构的“超级显微镜”,CSNS有着广泛的应用前景,包括生命科学、物理、化学、资源和环境以及新能源。CSNS的仪器控制系统基于白兔网络,提供同步和实时控制。在CSNS中,需要测量质子撞击目标的精确时间(T0)。测量的时间被发送到目标站和中子仪器,这样这些设备可以相对于T0工作。同时T0也要用来测量中子飞行时间[14]。
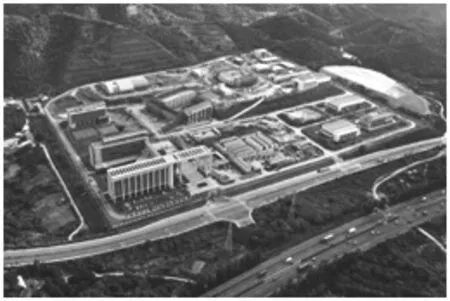
图10 CSNS鸟瞰图Fig.10 View of CSNS
5.1.2 GSI(德国重离子研究中心)
GSI亥姆霍兹重离子研究中心是一个重离子实验室,从事物理学和相关科学学科的基础和应用研究,它位于德国达姆施塔特。GSI的加速器复合体正随着一个新的反质子和离子研究设施而扩展。FAIR将是世界上最大、最复杂的加速器设施之一,其最大的加速器周长为110m。
FAIR要求中央控制器在500μs内触发2000-3000子系统中的任何一个子系统中。虽然绝大多数只需要大约1μs的精度,但是许多子系统,如射频、光束仪器和实验需要1ns~5ns准度和10ps的精度,这些将通过使用WR网络来实现[15]。
5.2 中微子/宇宙射线探测器
5.2.1 LHAASO(中国)
2015年12月获批立项,在海拔4400m处建设的大型高海拔空气簇射观测站(Large High Altitude Air Shower Observatory,LHAASO),该观测站 1.36km2的地面探测器阵列需要对簇射粒子的到达时间进行精确的测量,为了获得好于0.5°的宇宙线入射角分辨力,要求在宽温环境下保证5635个探测器记录精度达0.5ns的时间测量准确度[10,12]。
LHAASO项目已通过WR的鉴定验收,目前使用超过500台的WRS交换机,连接所有探测器节点[16]。
5.2.2 立方千米中微子望远镜(KM3NeT)
KM3NeT是位于地中海底部的新一代中微子望远镜研究机构。KM3NeT将致力于发现和后续研究宇宙中的高能中微子源,并确定中微子的质量等级。通过关联不同“数字光学模块”( DOMs )的探测时间,从中研究中微子的性质和轨迹,从而研究中微子的来源。测量所需的角度分辨率为0.1°,将其转化为所有DOMs的同步上,时间精度为1 ns,抖动数为100ps。
KM3NeT中使用WR作为同步系统。它将DOMs ( WR节点)与岸上时钟参考同步,以允许使用基于FPGA的1ns分辨力的时间-数字转换器对光子的到达时间打上时间戳。
5.3 国家时间实验室
5.3.1 MIKES(芬兰计量认证中心)
MIKES是芬兰有限公司VTT技术研究中心的一部分。自2013年起,它一直运营着一条长950km的WR链路——这是目前为止最长的WR链路——来研究WR在长距离时间传输中的应用,并与基于GNSS的时间传输方法(如GPS精确点定位)进行比较。最近,它还运行了一条50km长的WR链路,研究用于大地测量应用的中距离低抖动和低不对称时间传输( IGS参考站、VLBI和卫星激光测距)[17]。
5.3.2 LNE-SYRTE(法国国家计量研究所)
LNE-SYRTE是法国国家计量实验室,负责时间和频率,受国家计量研究所的委托。它是巴黎天文台锡尔特部门的一部分。目前,WR在LNE -SYTRE (巴黎天文台)用于在内部传播UTC。在未来一年内,巴黎天文台会完成在巴黎地区的实地部署。具体而言,巴黎天文台正在参与欧盟项目WRITE - EURAMET EMPiR,其目的是为了给工业上的合作伙伴提供频率和时间标准[18]。
6 WR未来发展趋势
电信和信息科学的高速发展正使得工业时间的传输要求越来越接近科研机构的水平。例如,亚微秒精度的智能电网,即将到来的100G以太网网络,精度要求在几纳秒内的5G移动电信以及高频率交易等,这些终端应用领域的时间同步都可以通过WR技术加以解决。
WR能解决相位同步等问题,同时还能在大范围和多设备的情况下以亚纳秒精度同步时钟。此外,加上其良好的可扩展性,WR将有助于开发整个世界范围的地面同步机制,其不仅可用作GPS 解决方案(基于地面卫星接收站天线)的后台技术,而且还能开启自动驾驶汽车或室内导航等全新应用的大门。
6.1 智能电网
世界上最好的技术大学之一,瑞士洛桑联邦理工学院( EPFL )的分布式电气系统实验室正在试验运营着自己的智能电网。他们目前正运用WR来提高PMU(Power Management Unit,电源管理单元)的稳态精度,以此避免目前使用基于GPS的PMU的缺点:空间视野的局限性及GPS信号的不稳定性。研究结果表明,WR - PMU的性能受到PMU硬件的限制,而不是WR的性能;对于基于GPS的PMU来说,WR未来将是一种合适的替代方案[19]。
6.2 交易所
高频率交易离不开经过认证的精确时序,其需要通过可靠的机制从认证机构将时间戳(一般指股票交易时间)分配给业务中心。
德意志交易所是股票和其他证券交易的市场组织者,也是交易服务提供商。德意志交易所内部在同地2.0网络中使用WR来同步所有的网络捕获和时间戳的设备。其使用同一时间源来保证让客户能够将时钟同步到德意志交易所。他们正使用WR运行高精度时间同步试点项目,以确定WR是当前PTP时间同步协议的替代方案还是附加方案。
6.3 100G高速以太网的测试
急速增加的带宽需求驱动100G以太网尽快地投入应用,支撑100G以太网接口的关键技术,主要包含物理层通道汇聚技术、多光纤通道及波分复用(WDM)技术[20]。
传统的测试仪表,一般的测试系统为10G以下,测量精度20ns。64字节的以太网帧共有672比特的数据传输,在10G线路上传输一个1比特需要0.1ns,所以64字节需要67.2ns,20ns的测量精度足以将唯一时间戳标记给发送的每一帧标。
而对于100G的系统测试,传输一个64字节的数据帧仅需要前者的十分之一,也就是6.72ns,20ns的测量精度完全无法准确识别每个帧的发送时间,并且在多机框测试或异地测试中,机框之间的时间必须准确同步[20]。
基于以上两点要求,WR能在亚纳秒精度下对每个数据帧进行打戳的同时,还能准确的同步测试机框直接的时钟,该项技术能完全地满足100G以太网的测试需求。
6.4 无人驾驶
近些年来基础驾驶、ADAS(高级驾驶辅助系统)和无人驾驶对地图精度的要求越来越高。普通地图的定位精度在(5~10)m左右,而这对无人驾驶来说仍旧误差太大,其需要精度在(10~20)cm的“高精度地图”[21]。无人驾驶汽车最关键的技术在于如何在复杂的路况中实现精准的定位和与其他路面单位的交互。WR系统下小于1ns的时钟误差反应到定位误差不会超过30cm。
在未来,所有的无人驾驶汽车都将连成无人交通网络,这需要将同一GPS信号传输到所有终端的无人汽车上。若WR将来能实现无线通信,超高精度时间的传输以及无损的全面数据传输对于每辆车的高精度定位与控制有着极大地帮助。
7 结束语
从2008年1月21日的第一代WR面世,到2012年WR技术在网络时间传递上的应用,再到2018年10月在CERN召开的第十届WR技术研讨会,关于IEEE 1588—2008标准的WR扩展正被推广到即将发布的标准文本中一事宜,WR技术已经进化成为了精密时钟协议(PTP)的延伸,被称作WR-PTP,其标准化过程会在IEEE-1588V3 中得以完善,之后它将极易地适应多家厂商而不仅仅是科研机构。如今WRPTP以快速、确定、安全和多节点的优势将在计量、天文和网络传输等领域大放光彩,WR技术的推广将成为科技与经济发展的助力器。