燃料电池汽车能量管理系统运用复合模糊逻辑控制的研究
2019-01-02周圣哲崔强张懋源夏国廷王凯
周圣哲,崔强,张懋源,夏国廷,王凯
(1.青岛大学自动化与电气工程学院,山东省 青岛市 266071;2.山东省核电有限公司,山东省 海阳市 265100;3.青岛市公安局,山东省 青岛市 266071)
0 引言
21世纪以来,汽车科技蓬勃发展,汽车保有量迅猛增长,引发了严峻的能源、环境问题[1-2]。与此同时,高效、清洁和环保的新能源汽车异军突起[3-4]。燃料电池汽车(fuel cell vehicles,FCV)作为新能源汽车的一种,不仅能够高效地为汽车运行提供能量,而且零污染、无噪声、寿命长、易维护,具有广阔的研究前景[5-7],可为未来有效解决能源危机与污染问题提供新思路[8]。
但是,纯燃料电池汽车负载变化时燃料电池的响应较慢,其使用寿命会受到瞬时大电流放电的影响[9-10]。因此,需加装辅助电源,如蓄电池或超级电容器等[11],与燃料电池系统共同配合为汽车供能[12-13]。
针对燃料电池汽车能量管理系统,文献[14]提出一种解决FC+B混合能量系统中蓄电池荷电状态(state of charge,SOC)误差累积的方法,其实际SOC值可自动搜索出其最近的标准离散值,在获得最优决策的同时,降低耗氢量相对理论最优耗氢量的误差。文献[15]改进了燃料电池汽车中能量管理系统的拓扑,在功率管理控制中分别使用功率平衡策略与过功率恢复策略,保证功率的持续性与平稳性。文献[16]通过具有特定能量管理策略的双堆燃料电池系统解决了燃料经济性,提出了效率优化策略和瞬时优化策略。仿真结果表明,所提出的能量管理策略的双堆燃料电池系统可以显著提高燃料电池车辆的燃料经济性。
本文采用“燃料电池+蓄电池(FC+B)”配置模式的燃料电池汽车,燃料电池为电动汽车运行提供主要能量;蓄电池作为辅助能源装置,提供运行过程中的峰值电流,并回收减速、制动时的过剩能量。该系统能够有效缓解燃料电池功率和动态响应的压力,但对能量管理系统提出更高的要求。在此基础上,提出一种运用复合模糊逻辑控制的能量优化管理策略。该策略在保证燃料电池汽车动力性及功率平衡控制的基础上,根据负载需求功率、蓄电池当前荷电状态SOC以及蓄电池SOC目标区,动态修正燃料电池系统的输出功率分配系数α,同时控制燃料电池系统工作在高效区间,最后通过MATLAB/Simulink仿真进行验证。
1 燃料电池汽车动力系统建模
FC+B混合驱动型的燃料电池汽车动力系统如图1所示,由燃料电池系统、DC/DC变换器、蓄电池、DC/AC变换器、电机及其传动系统和能量管理系统组成。
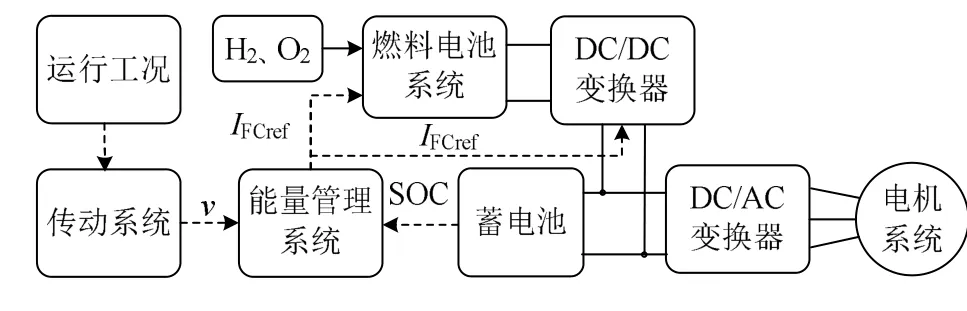
图1 燃料电池汽车动力系统模型Fig. 1 The model of fuel cell vehicle power system
1.1 燃料电池模型
本文中燃料电池采用质子交换膜燃料电池(proton exchange membrane fuel cell,PEMFC),是一种通过氧化还原反应将化学能转化成电能的清洁发电装置,理论上反应产物只有水,非常环保。其反应如公式(1)所示。

本燃料电池系统最大净输出功率为85.5 kW,开路电压为424 V,等效电路如图2所示,其中,燃料电池单元电压为VPEMFC。
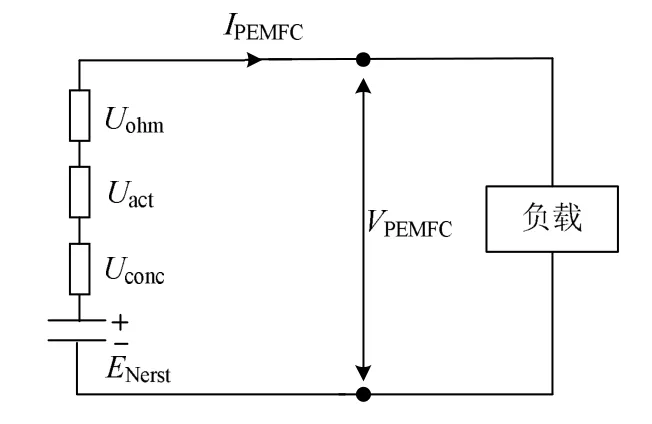
图2 燃料电池等效电路模型Fig. 2 The equivalent circuit model of fuel cell

式中:Enernst为能斯特电压;Uact为电化学反应初期的活化过电压;Uohm是电池单元内部的欧姆过电压;Uconc是当燃料电池内部电流密度较高而产生的集中过电压。
本文中燃料电池系统的功率-效率曲线如图 3所示,其中,PFCmin指燃料电池系统最小输出功率,PFCop指燃料电池系统最佳输出功率,PFCmax指燃料电池系统最大输出功率。本策略通过控制功率主分配系数α1与输出功率的修正系数α0,控制燃料电池系统实际输出功率 PFC在PFCmin与PFCmax之间,并尽可能工作在PFCop附近,从而提高燃料电池系统的效率。
1.2 蓄电池模型
本文中蓄电池的Rint模型是基于图4所示的等效电路。
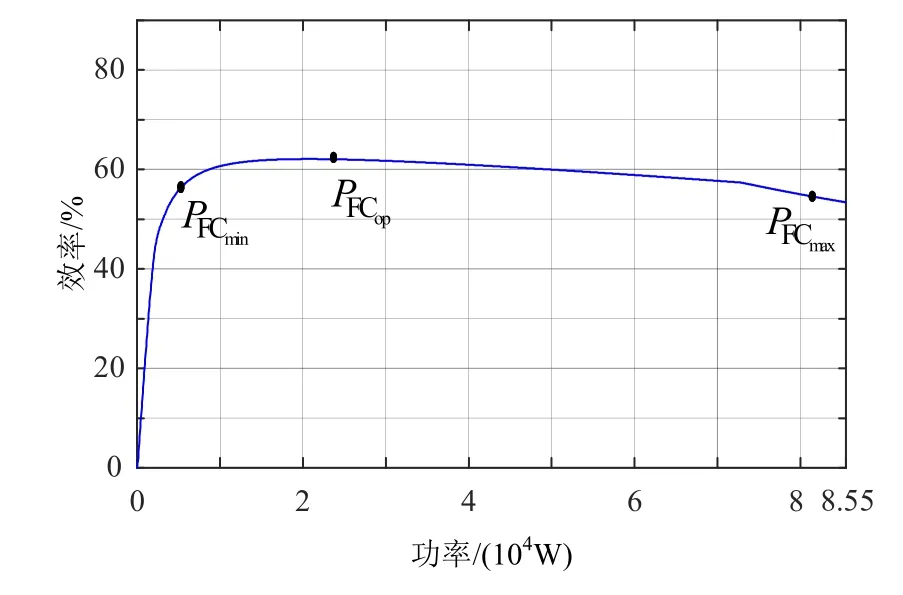
图3 燃料电池的功率-效率曲线Fig. 3 The power-efficiency curve of fuel cell
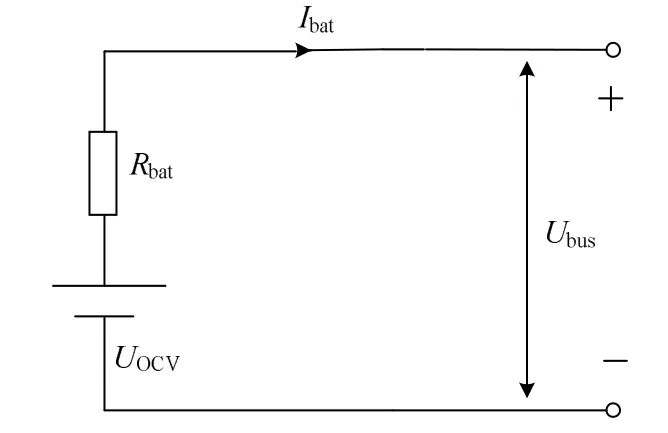
图4 蓄电池Rint模型Fig. 4 The Rint model of battery

式中:Uocv为电池组的开路电压;Rbat为电池组的内阻;Ubus为总线电压;n为蓄电池串联数。
电池的SOC表达式为

式中:Q为电量;Cbatt为电池容量。
2 基于复合模糊逻辑控制策略的能量管理系统
本文在能量管理系统中使用复合模糊逻辑控制器,可以确定不同电源之间的功率分配,具有良好的燃料经济性和系统高效性。常规的模糊控制器根据负载需求功率和蓄电池 SOC制定逻辑规则,本文提出一种新型的复合模糊逻辑控制策略,在常规模糊控制器的基础上,根据蓄电池荷电状态 HSOC与其目标荷电状态 HSOCtag的差值ΔHSOC,对燃料电池系统的输出功率分配系数进一步修正,其模糊控制规则如表1、表2所示。
主模糊控制器的作用是确定燃料电池的功率主分配系数α1,使能量管理系统能够满足负载功率需求,其输入量分别是负载需求功率Preq和蓄电池当前SOC,输出量为功率主分配系数α1。其中,需求功率Preq模糊子集是{N,PL,PM,PH},分别代表负值、正小值、正中值、正大值;蓄电池 SOC模糊子集是{BL,BM,BH},分别代表较小值、中值、较大值;功率主分配系数α1模糊子集是{VL,L,M,H,VH},分别代表很小值、小值、中值、大值、很大值。子模糊控制器是对功率主分配系数 α1进行修正,目的是控制 SOC变化趋势,使其接近目标区,其输入量ΔHSOCbat是目标SOC与蓄电池实际SOC的差值,其模糊子集是{NH,NL,PL,PH},其意义是负大值、负小值、正小值、正大值;燃料电池输出功率的修正系数 α0的模糊子集是{L,M,H,VH},分别代表小值、中值、大值、很大值。
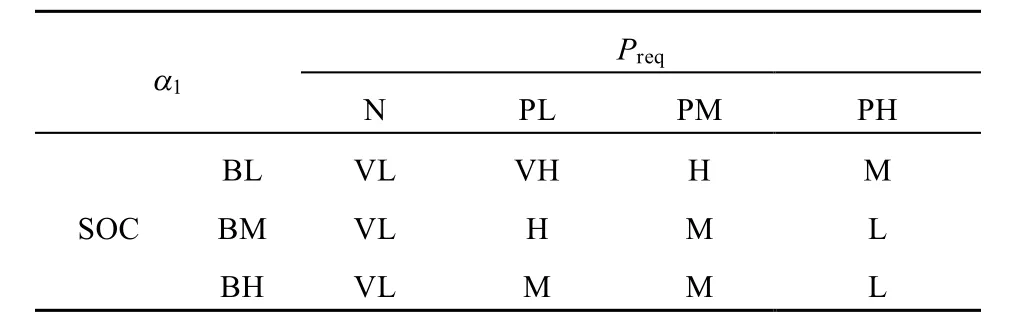
表1 主模糊控制器的控制规则表Tab. 1 Rules of the primary fuzzy controller

表2 子模糊控制器的控制规则表Tab. 2 Rules of the secondary fuzzy controller
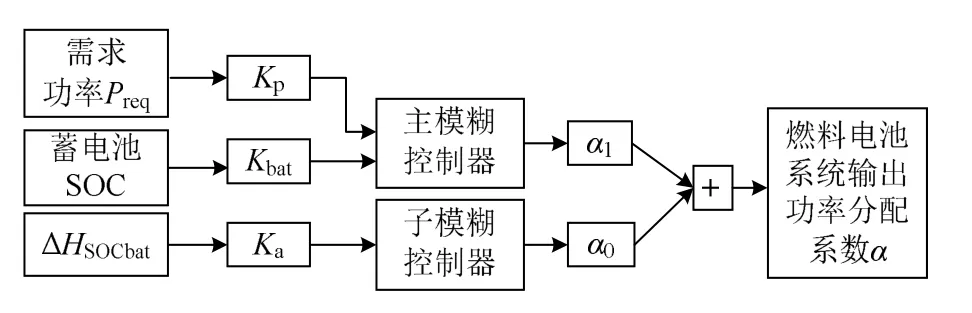
图5 复合模糊逻辑控制器基本结构图Fig. 5 Structure diagram of the hybrid fuzzy controller
图5显示了功率分配的复合模糊逻辑控制器,用于确定燃料电池的参考输出功率。控制思想是,在蓄电池SOC较低的情况下,燃料电池系统不仅要尽可能满足负载需求功率,还以适当的充电功率对蓄电池进行充电;相反,如果蓄电池SOC较高,则将燃料电池系统输出功率保持在负荷功率要求的低或中水平,从而在满足实际工况需求功率的基础上,保证蓄电池SOC的变化在目标范围内(40%~70%)。
3 仿真结果及分析
为了验证复合模糊逻辑控制策略的能量控制管理,整车在部分新欧洲行驶(new European driving cycle,NEDC)工况下运行,其车速与时间的关系如图6所示。
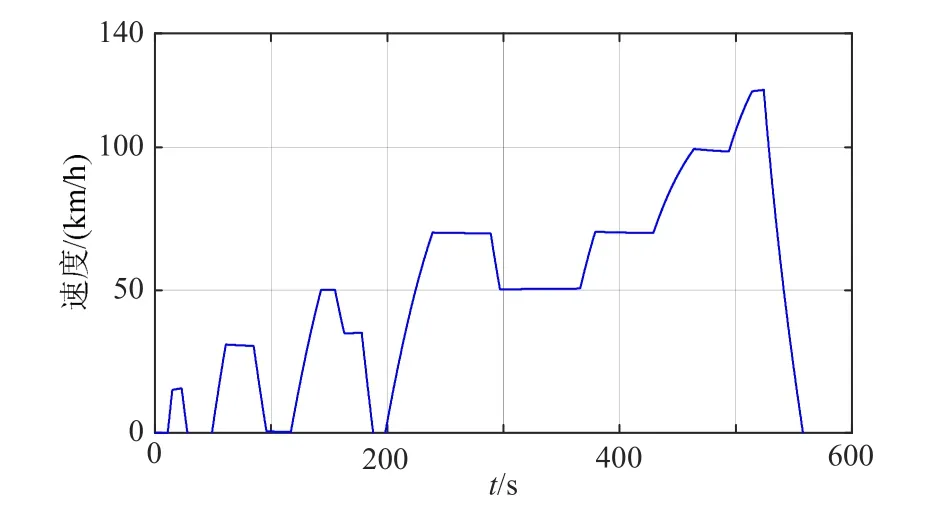
图6 部分NEDC循环工况中车速与时间关系Fig. 6 The speed and time relationship in a part of NEDC
输出功率可通过端电压与输出电流乘积得到。本仿真中燃料电池系统输出功率、蓄电池输出功率和实际负载的功率变化曲线如图7所示,其中蓄电池初始HSOC=60%。
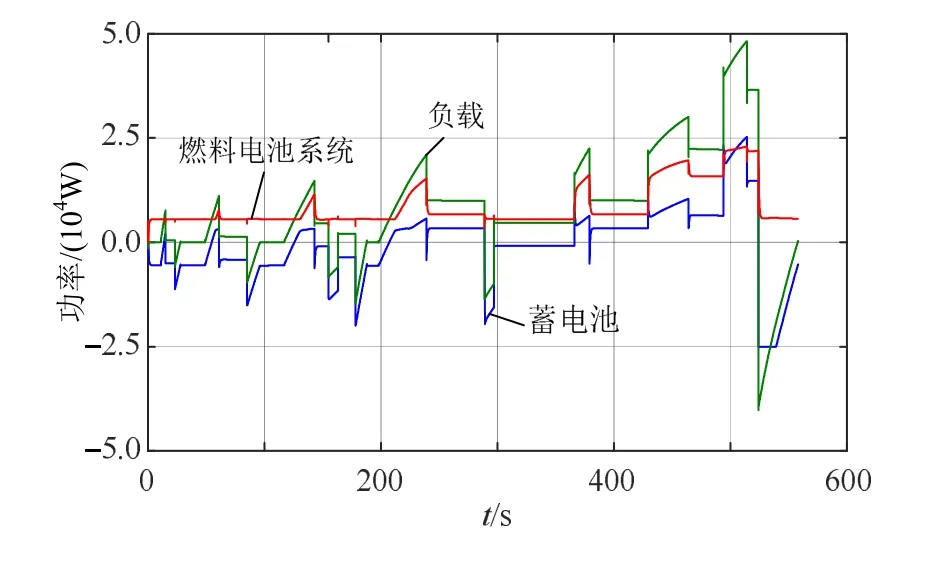
图7 初始HSOC=60%,复合模糊逻辑控制下功率曲线Fig. 7 When the initial HSOC is 60%, the power curves under the hybrid fuzzy logic control
燃料电池系统的输出功率能够满足大部分比较平缓的功率需求,但无法跟随某些瞬时大功率需求,此时蓄电池应快速响应,与燃料电池系统共同配合满足负载需求功率。当负载需求功率小于燃料电池的最小输出功率PFCmin时,如0~49 s、61~117 s、143~204 s、524~558 s等时段,此时为避免燃料电池工作在低效率区,燃料电池应以最小输出功率运行,蓄电池回收剩余能量。在49~61 s、117~143 s、204~289 s、366~524 s等时段,负载需求功率较大,本策略为燃料电池系统分配的功率输出系数α,可避免燃料电池瞬时大电流放电和长时间大功率工作,同时使燃料电池工作在效率较高的区间,蓄电池补充主力电源,较好地满足行驶工况的加速要求;在524~558 s,汽车减速,负载功率为负,且在 524~533 s期间,负载功率的绝对值大于蓄电池的最大充电功率,此时对充电功率进行限值,使其不大于蓄电池的最大充电功率。
燃料电池系统中较常规的控制策略为功率追踪策略,旨在使用最小的电量前提下,使燃料电池的输出功率尽可能跟随负载需求功率。当蓄电池初始HSOC=60%时,其功率变化曲线如图8所示。
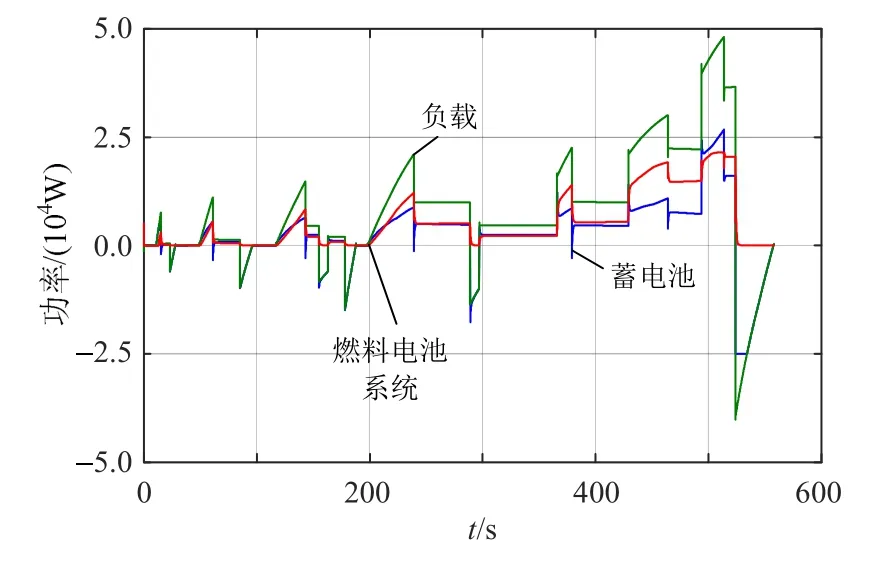
图8 初始HSOC=60%,功率追踪控制下功率曲线Fig. 8 When the initial HSOC=60%, the power curves under the power track control
为了更好地对能量管理系统进行评估,引入燃料电池氢气消耗(g)。理论上,氢气消耗可由公式(5)得到:

式中:N为燃料电池数;F为Faraday常数,单位是A⋅s/mol;T为运行时间;2HM 为氢气摩尔质量,本文取2.02g/mol;ifc为燃料电池输出电流。
在同一运行工况下,对燃料电池汽车运用功率追踪策略与本文提出的复合模糊逻辑控制策略。蓄电池 SOC与燃料消耗变化曲线如图 9、图 10所示。
结束运行后,功率追踪策略的蓄电池SOC由初始 60%变为 62.68%,燃料消耗 22.85 g,复合模糊逻辑控制策略蓄电池 SOC由初始 60%变为62.68%,燃料消耗 22.31 g。2种策略下的 SOC变化基本相同,但复合模糊逻辑控制策略下氢气消耗减少0.54 g。也就是说,在同一运行工况下,复合模糊逻辑控制策略不仅能满足负载功率需求,而且可以通过减少燃料电池的能量转换来提高系统的效率,提高整车经济性。

图9 HSOC=60%,2种策略下SOC变化曲线Fig. 9 When the initial HSOC=60%, the SOC change curves under two strategies
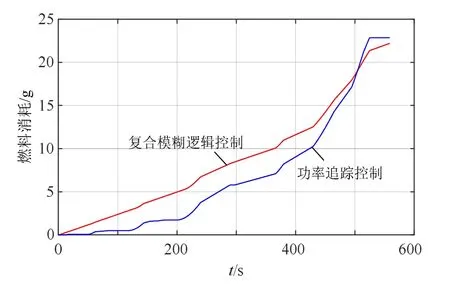
图10 HSOC=60%,2种策略下燃料消耗变化曲线Fig. 10 When the initial HSOC=60%, the fuel consumption change curves under two strategies

图11 初始HSOC=80.2%,复合模糊逻辑控制下功率曲线Fig. 11 When the initial HSOC=80.2%, the power curves under the hybrid fuzzy logic control
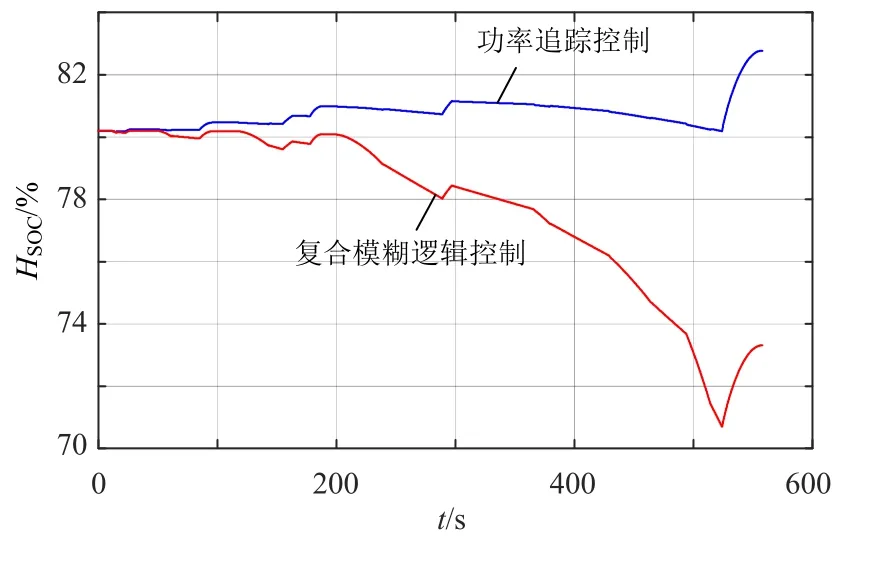
图12 HSOC=80.2%,2种策略下SOC变化曲线Fig. 12 When the initial HSOC=80.2%, the SOC change curves under two strategies
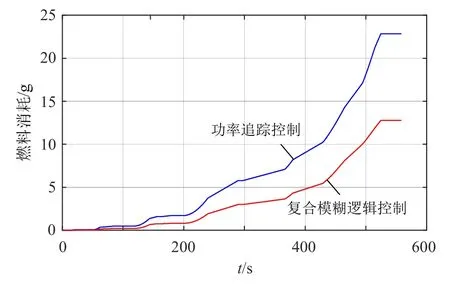
图13 HSOC=80.2%,2种策略下燃料消耗变化曲线Fig. 13 When the initial HSOC=80.2%, the fuel consumption change curves under two strategies
当蓄电池SOC较大时(HSOC=80.2%),此时蓄电池SOC大于目标值,复合模糊逻辑控制策略倾向于增加蓄电池出力,使蓄电池SOC逐渐接近目标区,同时可以减少燃料消耗。为避免蓄电池“过充”,不再对燃料电池最小输出功率进行限制。燃料电池的工作区域设定在跟随负载需求功率,超出燃料电池高效工作区或变化频率较大的部分,由蓄电池参与供能。其功率曲线如图11所示。
2种策略中 SOC与燃料消耗变化曲线如图12、图13所示。
如图12和图13所示,在完成一个运行工况后,功率追踪策略的 SOC由 80.2%上升至82.77%,燃料消耗22.85 g,复合模糊逻辑控制的SOC由80.2%变化至73.31%,燃料消耗12.78 g。从复合模糊逻辑控制下SOC动态过程可以看出,虽然开始阶段SOC值上下波动,但整体呈现逐渐接近SOC目标区趋势。即当蓄电池初始SOC较大时,本文所提出的复合模糊逻辑控制策略实现了增加蓄电池功率输出的比重,节省燃料消耗。
当蓄电池SOC较低时(以HSOC=39.8%为例),复合模糊逻辑控制下功率曲线如图14所示。

图14 初始HSOC=39.8%,复合模糊逻辑控制下功率曲线Fig. 14 When the initial HSOC=39.8%, the power curves under the hybrid fuzzy logic control
2种策略中 SOC与燃料消耗变化曲线如图15、图16所示。

图15 HSOC=39.8%,2种策略下SOC变化曲线Fig. 15 When the initial HSOC=39.8%, the SOC change curves under two strategies
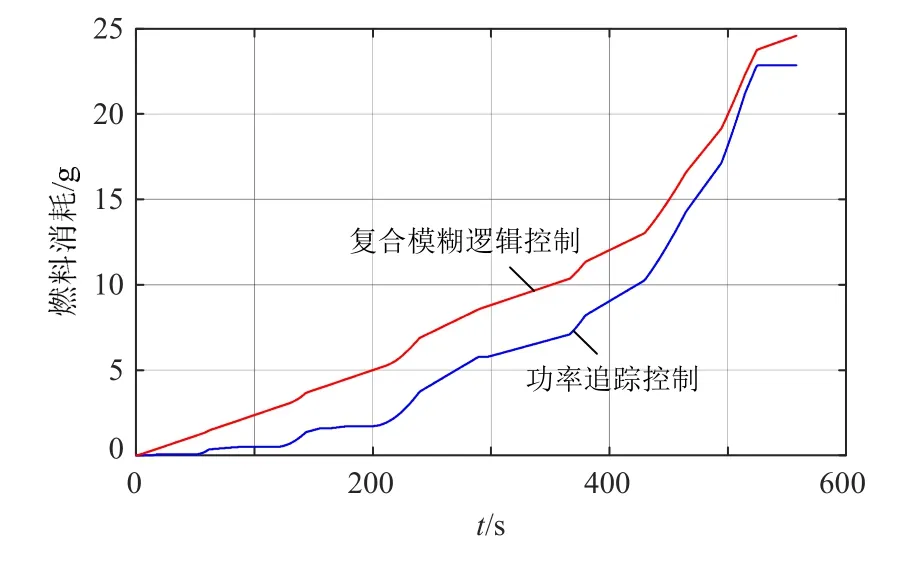
图16 HSOC=39.8%,2种策略下燃料消耗变化曲线Fig. 16 When the initial HSOC=39.8%, the fuel consumption change curves under two strategies
在完成运行后,功率追踪策略的 SOC由39.8%上升至42.45%,燃料消耗22.85 g,从复合模糊逻辑控制的功率曲线可以看出,相较于图7、图11中蓄电池初始SOC适中或较高的情况,图14燃料电池系统出力比重明显增加,蓄电池出力有所减少,蓄电池SOC由39.8%变化至44.87%,燃料消耗24.58 g,蓄电池SOC增长幅度明显高于功率追踪控制。说明本文提出的复合模糊逻辑控制可以根据蓄电池 SOC灵活调整各能量源出力,且燃料电池能在满足负载需求功率的前提下,还可以适当的功率为蓄电池充电,使蓄电池SOC逐渐接近目标区。
4 结论
本文提出一种复合模糊逻辑控制的混合能源动力系统能量优化策略,根据负载需求功率,蓄电池当前SOC以及蓄电池SOC目标值,动态修正燃料电池系统的输出功率分配系数α,并通过MATLAB/Simulink仿真进行验证。仿真结果证明,当蓄电池SOC适中时(以HSOC=60%为例),该策略将蓄电池SOC维持在适当范围内,相较于功率追踪法,2种策略下蓄电池SOC变化基本相同,而前者氢耗量减少0.54 g;当蓄电池初始SOC较低或较高时(分别以HSOC=39.8%和HSOC=80.2%为例),相较于功率追踪策略,本策略使蓄电池SOC逐渐接近目标区。本策略实现了能量动态分配,控制更加灵活,提高系统效率,具有一定的实用价值。