特种车辆交叉口信号优先控制系统设计
2018-12-28强成
强 成
(中国人民解放军63996部队驾驶员训练基地,北京 100094)
前言
特种车辆是指执行特别任务的专用车辆,包括警车、消防车、救护车、工程救险车、军事监理车等。《道路交通安全法》已有规定,特种车辆执行紧急任务时,在确保安全的前提下,不受行驶路线、行驶方向、行驶速度和信号灯的限制,其他车辆和行人应当让行。随着机动车保有量的日益增加,特种车辆快速通行与交通拥堵之间的矛盾日益突出,如何使特种车辆安全顺畅通行,正逐渐得到专家学者的高度关注。美国、日本等国家的交通控制系统中就包括紧急车辆优先系统,不少学者对公交信号优先控制也进行了研究[1-2]。在我国,关于公交信号优先的研究有很多[3-6],而特种车辆信号优先的研究和应用相对较少。北京2008年奥运会期间,在奥体中心区利用射频技术进行了道路交叉口公交车信号优先和奥运VIP车辆信号紧急优先的设计[7];文献[8]利用无线通讯和单片机技术,设计了基于单点控制的特种车辆绿灯畅行系统,文献[9]将ZIGBEE技术用于特殊车辆信号优先控制中,发现车路间的通信可以提高车辆的运行效率,同时驾驶员获得交叉口信号的信息也在一定程度上提高了车辆运行的安全性。
在执行紧急任务时,特种车辆可闯红灯,在信号交叉口存在较大的安全隐患,因此,设计安全、有效的特种车辆信号优先控制方法是十分必要的。本文在特种车辆行车特性和信号优先理论的基础上,设计了特种车辆交叉口信号优先控制系统,并阐述了信号优先控制的策略,控制系统可以有效提高特种车辆的行车速度与交通安全性。
1 特种车辆优先控制范畴
执行紧急任务的特种车辆速度快,在交通安全前提下,享有优先通行权,不受行驶路线、行驶方向、行驶速度和信号灯的限制,其他车辆和行人应当让行。当特种车辆执行非紧急任务时,不享有道路通行优先权,且不能使用警报器和标志灯具。
公交优先包括空间优先和时间优先[10]。类似地,特种车辆优先也可包括空间优先和时间优先两种。空间优先是指对特种车辆在通行空间上给予优先,如设置专用车道。时间优先是指在交叉口为特种车辆提供优先通行信号,不必考虑交叉口总体效益的最佳化,在安全通行前提下,最大化减少特种车辆延误,降低特种车辆的路线行程时间,提高特种车辆的运行效率。然而,特种车辆在执行紧急任务的出行量相对较小,再加上特种车辆不受标志、标线等限制,所以,通过设置特种车辆专用道的可行性较低,空间优先具有很大的限制性和局限性,因此特种车辆时间优先则更加符合实际,时间优先常用方法是交叉口信号优先。
2 特种车辆交叉口信号优先控制系统
特种车辆交叉口信号优先是一种绝对优先,不必考虑交叉口总体效益最佳化,它的总体目标应该是特种车辆绿灯畅行和保证交通安全。特种车辆信号优先系统由特种车辆检测系统、通信系统、交叉口信号控制系统、交通管理与控制中心四部分组成,如图1所示。
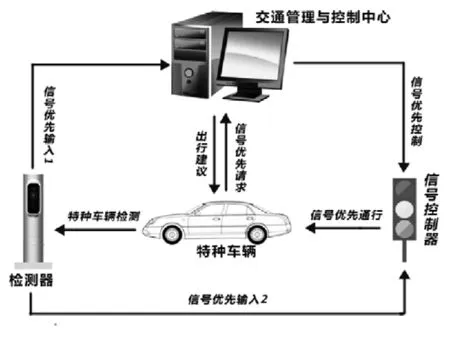
图1 特种车辆交叉口信号优先系统
2.1 特种车辆检测系统
在特种车辆上安装车载终端,包括GPS、特种车辆信号发射器、通信终端三部分。GPS实现了交通管理与控制中心对特种车辆的定位和追踪。特种车辆信号发射器一般具有固定频率,用于向交通管理与控制中心和信号控制器发出请求信号,实现特种车辆与交叉口信号系统之间的通信,特种车辆在执行紧急任务时,需要打开信号发射器,不执行紧急任务时,关闭信号发射器。通信终端的作用是实现特种车辆与交通管理与控制中心、交通信号控制系统之间的通信,对特种车辆发布出行诱导信息,并预先调整相应道路交叉口的信号系统。
在需要实行特种车辆信号优先时,交叉口的上、下游分别设置与特种车辆信号发射器相应频率的信号检入和检出设备。当检入设备检测到有特种车辆到达时,将特种车辆到达信息快速传递到信号机控制系统和交通管理与控制中心,由交通管理与控制中心实施优先策略,然后发出指令给信号机控制系统,以便实现特种车辆顺畅优先通过交叉口。设置检出设备的目的是为了让控制系统获取特种车辆离开交叉口的信息,以便调整信号配时。
特种车辆检测系统通过计数器记录检入和检出设备间的特种车辆数,计数器通过通行系统实现与特种车辆、交通管理与控制中心、交通信号控制系统之间的信息交流。当检入设备被激活时,计数器计数加 1,当检出设备被激活时,计数器计数减 1。在检测设备正常工作情况下,仅当计数器的计数大于或等于1时才考虑特种车辆信号优先的问题。当检测设备出错或计数器计数异常时,需要对计数器进行初始化操作,计数器工作流程如图2所示。

图2 计数器工作流程图
2.2 通信系统
通信系统将检测设备的输出信号传输到信号控制系统和交通管理与控制中心,作为信号控制决策的输入;同时将控制策略从交通管理与控制中心传输给信号控制器,来控制信号灯的显示,当没有交通管理与控制中心的情况下,由信号控制系统直接控制信号灯。此外,通信系统实现了车载终端与交通管理与控制中心之间的通信,车载终端将车辆的类型、出发点、目的地等信息传输到交通管理与控制中心,交通管理与控制中心将出行路径、注意事项等出行信息传输给车辆终端。通信系统实现了各个子系统间的信息互通,系统通信的效率直接影响到信号优先控制的精确度。
2.3 交通信号控制系统
交通管理与控制中心通过车载终端及信号检测设备来定位及追踪特种车辆,获取特种车辆信号优先请求,并将交叉口信号调整方案传输给相应的交叉口信号控制系统,并指令信号控制系统在规定的时间内调整信号。
交通信号控制系统负责响应信号优先请求并执行相应的信号变换,信号变换可由信号控制器执行,也可以先由交通管理与控制中心对优先请求进行采集和处理,然后驱动交叉口信号控制器来执行。在不设置交通管理与控制中心的条件下,信号控制系统将基于预置策略做出是否要进行特种车辆信号调整的决策,同时还要负责对优先请求进行优先等级排队管理。
2.4 交通管理与控制中心
交通管理与控制中心对特种车辆进行定位追踪及出行诱导,并设计信号调整的控制方案,实现特种车辆的优先畅行。特种车辆在执行紧急任务时,通过车载终端将特种车辆的属性信息发送给交通管理与控制中心,交通管理与控制中心则开始对特种车辆实行全程定位监控和出行诱导,并在合理的时间范围内调整途经交叉口的信号控制方案,在安全的前提下,使特种车辆以最短的时间到达目的地,同时,保证道路交叉口不存在交通冲突,提高了交通安全性。若特种车辆出现故障或需要紧急救助,控制中心也可提供必要的信息或救援工作。在交通状态较为简单的交叉口,可不设置交通管理与控制中心,车辆终端只包括专用信号发射器,车辆与交通信号控制系统之间进行信息通讯,实现特种车辆的检测与优先通行。
3 特种车辆交叉口信号优先控制策略
3.1 单辆特种车通过交叉口
特种车辆通过车载终端将车辆的类型、出发点、目的地等信息传输到交通管理与控制中心,交通管理与控制中心对特种车辆开始进行定位追踪。当特种车辆经过信号检测设备时,信号检测设备将特种车辆的行驶速度传送给交通管理与控制中心或信号控制系统,供其计算到达交叉口的时间。一般情况下,黄色信号灯作为绿灯和红灯之间缓冲,显示时间短,则特种车辆信号优先控制中可以把黄灯当作红灯处理。如果行驶方向信号灯为红灯且剩余红灯时间大于特种车辆到达交叉口的时间,可以通过缩短目前信号相位使下一个绿灯相位提前到达来实施特种车辆信号优先;如果该方向的信号灯为绿灯且剩余绿灯时间小于特种车辆到达交叉口的时间,则通过延长绿灯时间使特种车辆顺利通过。当特种车辆经过交叉口后,检出设备会检测到车辆已驶过,则停止该方向的信号优化。另外,为了减少由于特种车辆优先通过而带来的对道路交叉口交通流的不良影响,需要在特种车辆经过后,对冲突相位进行绿灯时间补偿。
目前我国常见的普通交叉路口主要有十字型路口、T型路口、Y型路口三种类型 ,十字型交叉路口是最为常见的一种,信号优先检测方式如图3所示,m和n分别为检入设备和检出设备距离信号交叉口停车线的距离。信号优先系统启动后,特种车辆行驶方向信号灯变为绿灯,为保证特种车辆畅行,冲突方向信号灯应为红灯,冲突方向非特种车辆停车等待特种车辆通过。T型交叉路口比十字型路口少一个方向,但是其交通通行情况却和十字型路口相似[8],所以T型交叉路口的优先系统控制方案与十字型的相同。

图3 十字型交叉口特种车辆信号优先检测方式示意图
Y型交叉路口的设计方案则与十字型、T型交叉口不同,从特种车辆绿灯畅行和安全角度考虑,当一个方向实行信号优先时候,其余两个方向则应该均处于红灯禁行状态,如图4所示。

图4 Y型交叉口特种车辆信号优先检测方式示意图
考虑到特种车辆信号优先的总体目标是交通安全和特种车辆绿灯畅行,因此,在特种车辆到过交叉口前,必须有足够的时间处理冲突相位的信号配时,使特种车辆通过信号交叉口时,恰好是绿灯且冲突相位恰好是红灯。所以,信号检测设备的位置选择比较重要。
信号检入设备的位置与特种车辆行驶速度、系统反应时长、信号灯时长等因素有关,通常情况下,特种车辆从信号检入设备到交叉口停车线行驶时间要大于系统反应时长,且小于信号灯时长,使特种车辆触发检入设备后,系统能够有时间启动信号优先,同时保证行驶时间在信号灯时长的k倍范围内,避免资源浪费。

式中,v为特种车辆的行驶速度;m为信号检入设备与该方向交叉口停车线的距离;t为特种车辆从信号检入设备行驶到交叉口停车线的时间;T系为特种车辆检测系统反应时长;T为信号灯时长;k为参数,取值受交叉口流量影响。
检入设备检测到特种车辆,交叉口对应的信号灯若为绿灯,则需延长绿灯时间,保证特种车辆可以按照正常速度通过信号交叉口;当检入设备检测到特种车辆,交叉口对应的信号灯为红灯时,若在交叉口处有车辆排队,需要保证在特种车辆到达前,排队的非特种车辆在交叉口处疏散。检入设备检测到特种车辆,交叉口对应的信号灯若为黄灯,则按照红灯处理即可。
当检入设备检测到特种车辆,信号灯为红灯时,特种车辆速度及通过信号交叉口的时间受交叉口排队非特种车辆的影响。在特种车辆优先控制系统调节下,红灯变为绿灯,需要保证因红灯而在信号交叉口等待的车辆,在特种车到达信号交叉口时已经疏散,才能使特种车辆顺畅通过信号交叉口。

式中,L为非特种车辆排队长度;V为最后一辆排队的非特种车辆通过交叉口停车线的速度;a为非特种车辆行驶加速度;T消为非特种车辆排队消散时间。
综合(1)—(6)式,信号检入设备与该方向交叉口停车线的距离m的约束条件为:

不同信号交叉口各参数取值不同,因此,信号检入设备与该方向交叉口停车线的距离需要根据系统布置当地实际情况进行合理设置。
检出设备的设置位置需要满足特种车辆在通过信号交叉口后,后续紧跟车辆与特种车辆保证必要的安全距离,防止特种车辆紧急停车、掉头等行为导致的安全事故。

式中,n为检出设备距离信号交叉口停车线的距离;T1、T2为特种车辆行驶安全时间系数,取值受交叉口交通流量的影响。
3.2 多辆特种车通过交叉口
多辆特种车需要通过信号交叉口时,需要由交通管理与控制中心与信号检测设备判定特种车行驶方向及到达的先后顺序,进而启动信号优先程序。
当特种车辆的行驶方向相同时,如果行驶方向信号为红灯或者黄灯,则该方向的信号灯变为绿灯的时间应按首辆特种车实施信号优先相位开始,该方向的信号灯由绿灯变为红灯的时刻按最后一辆特种车通过检出设备的时刻为止。如果行驶方向信号为绿灯,则绿灯信号延长至最后一辆特种车通过。当冲突方向的特种车辆相继要通过信号交叉口时,则需要通过交通管理与控制中心判断特种车到达信号交叉口的先后顺序,按照先到先通行的原则进行特种车辆信号优先控制。
3.3 特种车辆信号优先控制逻辑
特种车辆交叉口信号优先控制逻辑如图5所示,主要包含几个步骤:
(1)到达交叉口的特种车辆数级判断
当信号检入设备检测到特种车辆到达时,首先对优先车辆进行车辆数判断。当到达车辆为一辆特种车时,则立即发送优先信号,及时对特种车辆进行信号优先;当到达特种车辆是多辆时,进行第(2)步判断。
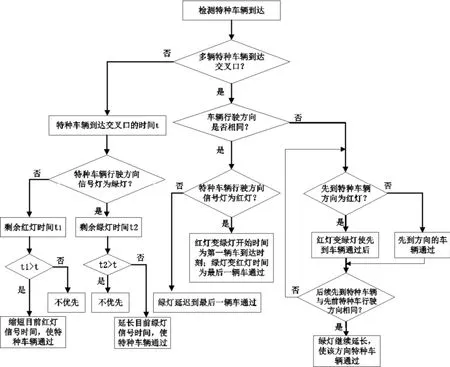
图5 特种车辆信号优先控制逻辑示意图
(2)特种车辆行驶方向判断
当特种车辆行驶方向相同时,进行第(3)步判断;当特种车辆行驶方向冲突时,进行第(4)步判断。
(3)特种车辆行驶方向信号灯颜色判断
特种车辆行驶方向信号灯为红灯,则实行信号优先,并且红灯变为绿灯的时间为第一辆特种车到达的时刻,绿灯变红灯的时间为最后一辆特种车通过时刻。当特种车辆行驶方向信号灯为绿灯时,则绿灯延长至最后一辆特种车通过信号交叉口。
(4)冲突时先到交叉口车辆方向信号灯颜色判断
通过信号检入设备检测特种车辆到达,经交通管理与控制中心判断车辆到达先后顺序。当冲突时先到交叉口车辆方向信号灯为红灯时,信号优先,然后按照先到先行的原则进行特种车辆优先通过。
4 小结
在交通安全和特种车辆绿灯畅行的要求下,智能交通系统的应用会越来越广泛。在特种车辆行车特性和优先控制理论的基础上,设计了特种车辆交叉口信号优先控制系统,阐述了特种车辆交叉口信号优先控制策略与逻辑,同时设定了检测设备的位置约束条件,信号优先系统实现了先进的交通管理系统的对接,具有技术上的可行性。信号优先控制系统实现了特种车辆的在交叉口的顺畅通行,同时又确保了交叉口的行车安全。然而,特种车辆的优先通行会造成非特种车辆的行车延误增加,特种车辆信号优先后,采取信号补偿尽快疏散交通流还有待进一步研究。
