GPS/GALILEO偏航姿态异常对动态PPP的影响及其改正模型
2018-12-27刘天骏曹新运匡开发范曹明
刘天骏,王 坚,曹新运,匡开发,范曹明
1. 中国矿业大学国土环境与灾害监测国家测绘地理信息局重点实验室,江苏 徐州 221116; 2. 北京建筑大学测绘与城市空间信息学院,北京 100044; 3. 武汉大学测绘学院,湖北 武汉 430079; 4. 山东科技大学 测绘科学与工程学院,山东 青岛 266590
在GNSS精密单点定位(PPP)中,卫星偏航姿态模型主要在两个方面影响高精度定位:①天线相位中心偏差(PCO)及变化(PCV)的改正。②载波相位观测值的天线相位缠绕计算也依赖卫星偏航姿态的确定[1]。如图1所示,当太阳、地球、卫星处于同一条直线时,GPS、GALILEO卫星姿态将在较短时间内翻转180°,此时卫星硬件能提供的最大偏航角速率不能达到名义偏航角速率,卫星无法维持名义姿态而出现姿态异常时期[2]。此外,当卫星(除IIR卫星)进入地影时,由于光敏感器不能正常工作,卫星名义姿态很难维持而产生地影机动[1]。在卫星姿态处于异常时期,若采用名义姿态将影响相位缠绕、天线相位中心偏差等误差的计算,严重降低高精度定位的可靠性。

图1 卫星姿态异常时期示意图Fig.1 Abnormal yaw attitude of satellite
国内外研究学者针对GNSS卫星姿态异常时期进行了系统性的研究。文献[1—10]提出了GPS卫星姿态改正模型并分析了该模型对卫星钟钟差、定位精度的影响;文献[11—16]分别给出了GLONASS-M、BDS、GALILEO卫星在姿态异常时期的偏航角模型及改正策略。目前,尚未有学者开展多系统卫星姿态异常对定位影响的相关研究,因此,本文基于GPS、GALILEO卫星系统的姿态控制策略,深入研究GPS、GALILEO卫星的子午、子夜、地影机动模型,分析GPS/GALILEO卫星偏航姿态异常时期的载波相位观测值残差变化,比较不同姿态改正策略下GPS/GALILEO动态PPP的定位精度。
1 GPS/GALILEO偏航姿态模型
1.1 GNSS卫星名义姿态模型
由于不同类型卫星制造商的星固坐标系定义不同,为保持一致性,IGS(International GNSS Service)定义星固系如下[17]:①Z轴平行于卫星天线信号发射方向并指向地心;②Y轴平行于太阳帆板并垂直于太阳、地球和卫星构成的平面;③X轴垂直于Y轴和Z轴并构成右手坐标系并指向太阳入射方向。为遵循IGS星固系的标准与规范,本文所有GNSS卫星均采用IGS所定义的星固系。
GNSS卫星名义姿态在星固系下3轴单位向量ex、ey、ez可由式(1)确定[17]
(1)
式中,e⊗为卫星至太阳方向的单位向量;r为地心指向卫星方向的单位向量;|*|表示向量取模运算符。GNSS卫星偏航角φ定义为沿轨道切线方向与星固系X轴之间的夹角[6]
φ=arccos(eT·ex)
(2)
式中,eT、ex分别沿轨道切线方向、卫星星固系X轴单位向量;arccos(·)为反余弦函数。根据太阳高度角、轨道角与式(2)的几何关系,名义姿态偏航角可以表示为[4]
φ=arctan 2(-tanβ,sinμ)
(3)
式中,β为太阳高度角;μ为轨道角(以远日点为起点);arctan 2(·)为FORTRAN语言中的反正切函数。对GNSS卫星而言,由于卫星的信号发射方向始终指向地心,因此不存在俯仰角与横滚角,卫星姿态仅用偏航姿态角φ确定[17],如图2所示,将卫星在轨切线方向eT绕星固系的Z轴旋转φ角度,即可确定星固系X轴的指向,因此,卫星在姿态异常时期,偏航姿态模型的建立主要是确定偏航姿态角φ的变化。

图2 载体坐标系X轴与轨道切线方向eT的几何关系Fig.2 Geometric relationship between the X axis of the coordinate system and the tangent direction eT of the orbit
1.2 GPS卫星姿态改正模型

(4)
式中,te、ts分别为地影机动结束时刻与开始时刻;φ(te)、φ(ts)分别为机动结束时刻和开始时刻的名义偏航角,可由式(3)计算。BLOCK ⅡF卫星在地影区域时,t时刻的模型偏航角φm(t)可由式(5)计算得到
(5)
BLOCK ⅡF卫星的地影机动不超过54 min,除地影机动外,在太阳高度角β较小且在近日点附近时,BLOCK ⅡF卫星姿态会在短时间内发生180°剧烈翻转,由于硬件最大偏航角速率达不到旋转所需要的偏航角速率,从而产生子午机动。在机动时间内,BLOCK ⅡF卫星将以最大偏航角速率旋转,直到模型偏航角等于名义偏航角时机动停止,则t时刻偏航姿态模型为[18]
(6)

(7)
由此导致卫星姿态控制方向发生变化,并引起约2 min的子午机动延迟,造成约13°的偏航角误差[18]。
BLOCK ⅡR卫星在地影期间能有效维持名义姿态,因此不受地影影响,只存在由于硬件速率限制所产生的子午和子夜机动,姿态改正模型与BLOCK ⅡF子午机动类似[3]。BLOCK ⅡR卫星子午机动(noon)与子夜机动(midnight)期间偏航角可分别由式(8)、式(9)确定[18]
(8)
(9)

1.3 GALILEO卫星姿态改正模型
根据欧洲全球导航卫星局(European Global Navigation Satellite Systems Agency)提供的GALILEO姿态控制算法文档表明[19]:GALILEO卫星在地影和子午机动期间采取与GPS卫星不同的姿态控制模式,为保证在姿态异常时期偏航角速率不超过硬件偏航速率的限制(IOV、FOC卫星约为0.203°/s),GALILEO卫星将采用动态动偏(dynamic yaw-steering)的姿态控制策略[17]。对于IOV卫星而言,其名义偏航角φ的计算为[19]
arctan 2(Sy,Sx)
(10)
式中,Sx、Sy、Sz为太阳单位向量,可根据太阳高度角β与轨道角μ(以近日点为起点)计算[19]

(11)
可以看出,结合式(11)、式(10)化简后,与式(3)中名义偏航角计算等价。当IOV卫星满足以下条件时进入地影(shadow)或子午机动[18]
(12)
式中,βy=2°,根据式(11)中的Sy作等式替换,易得β=2°,即当太阳高度角β<2°时,IOV卫星将出现偏航姿态异常。在机动时期,IOV卫星将采用动态动偏模式进行姿态控制,使用平滑后的Shy代替等式(10)中的Sy[19]
Shy=(sinβyΓ+Sy)/2+(sinβyΓ-Sy)
cos(π|Sx|/sinβx)/2
(13)
式中,Γ为Sy机动开始时正负号(即Sy>0,Γ=1;Sy<0,Γ=-1),结合式(13)、式(10)易得IOV卫星在机动时的模型偏航角
φm=arctan 2(Shy,Sx)
(14)
从式(13)可以看出,IOV卫星机动模式不同于GPS卫星,当IOV卫星在地影机动或子午机动且μ≈180°或μ≈0°时,太阳单位矢量Sx≈0,Sy≈0,则cos(π|Sx|/sinβx)≈1,Shy≈±sinβy,即式(14)将采用βy=2°计算模型偏航角,确保了偏航角速率不超过硬件限制[19]。IOV卫星地影与子午机动时间约为70 min,在开始机动的前15 min与机动即将结束的15 min,即使在太阳高度角β≈0°时,名义偏航角与模型偏航角差异不超过0°[19]。IOV卫星机动时间较长,在太阳高度角|β|<0.07°时,同样应采用机动开始时刻ts的太阳高度角β计算式(13)中的Shy。
与IOV卫星类似,FOC卫星存在地影或子午机动,采用动态动偏模式来控制在姿态异常时期的卫星偏航姿态。FOC卫星t时刻的名义偏航角φ(t)计算公式为[19]
φ(t)=arctan 2[-s(t)·n(t),-s(t)·r(t)×
n(t)]
(15)
式中,r(t)、n(t)、s(t)分别为t时刻惯性系下(J2000)卫星位置、轨道平面、太阳位置的单位向量。当FOC卫星的太阳高度角β较小,且处于近日点与远日点附近时,将产生子午或地影机动,其机动条件为[19]

(16)
式中,ε为太阳-地球-卫星的夹角arccos (r·s),在太阳高度角|β|<4.1°时,ε近似的等于轨道角μ。FOC卫星在机动期间,t时刻的模型偏航角φm(t)为[19]
φm(t)=90°·Γ+(φinit-90°·Γ)cos(2π/C·tmod)
(17)
式中,tmod为机动所经历的时间tmod=t-ts;φinit为机动干开始时刻ts的名义偏航角;Γ为φinit的正负号(即φinit>0,Γ=1;φinit<0,Γ=-1);C为常数5656。由式(17)可知,当太阳高度角β≈0°时,模型姿态角需翻转180°且机动时间最长,机动结束时的模型偏航角为φm(te)=φinit-180°,结合式(17)易得cos(2π/C·tmod)≈-1,tmod≈2828,可以看出FOC卫星地影与子午机动所经历的时间不会超过tmod的最大值2828 s,约为47 min。由于FOC卫星模型偏航姿态的计算与太阳高度角β无关,即使在|β|角较小时,也无需考虑在机动时期太阳高度角正负号的改变。
2 数据测试与分析
为研究偏航姿态改正模型在GPS/GALILEO卫星在姿态异常时期对动态PPP定位的影响,本文分别设计了名义姿态(Yaw-Nominal)、模型姿态(Yaw-Modeled)与剔除卫星(Delete)3种不同姿态策略,并选取7个MGEX站的GPS+GALILEO观测数据,结合不同分析中心所提供的精密轨道和钟差产品,对不同姿态模型下动态PPP载波相位观测值残差、PCO改正、相位缠绕以及定位结果等进行了试验与分析。
2.1 GPS卫星不同姿态模型对PPP观测值的影响与分析
为研究GPS卫星不同姿态模型对PPP滤波后观测值残差的影响,并顾及地面观测站在卫星姿态异常时期的可见性,本文选取NKLG与JFNG站的GPS+GALILEO观测数据,观测值采样率为30 s,截止高度角为7°,电离层采用无电离层组合(Iono-Free-LC)进行消除一阶项延迟,对流层采用Saastamoinen模型与Niell投影函数[20],基于CNES和GFZ分析中心所提供的精密轨道和钟差产品,采用PPP浮点解进行解算[21-22],分别给出各类型卫星在异常时期的偏航角、载波相位观测值残差、相位缠绕与PCO改正值的时间序列图。


图3 G01(IIF)穿过地影区域偏航角变化Fig.3 Variation of the yaw angle of G01 (IIF)through the shadow area

图4 G01(IIF)穿过地影区域相位缠绕与天线改正变化Fig.4 Phase wind-up and antenna correction of G01 (IIF)through the shadow area

图5 G01(IIF)穿过地影区观测值残差变化Fig.5 Residual variation of the observation value of G01 (IIF) through the shadow area
图6为2016年DOY181 G07(BLOCK ⅡR)卫星子午机动偏航角变化图,太阳高度角β≈0.17°,子午机动时间大约10 min,偏航角在短时间内翻转近180°,当硬件本身达不到这个翻转速度,就以最大偏航角速率进行姿态转动(start),直到名义偏航角与模型偏航角相等(end)时结束机动,其中在近日点(noon)两种姿态偏航角差异最大,两者差异高达约110°。
图7给出了G07卫星子午机动时,名义姿态与模型姿态对PCO、相位缠绕改正的影响,从图7中可以看出,两种姿态模型对相位缠绕将造成高达0.5周的差异,但对卫星的PCO改正的影响相同,这是由于BLOCK ⅡR的天线相位中心偏差只存在于Z方向,在X、Y方向上的偏差均为0,而GNSS卫星偏航姿态仅与偏航角有关,不存在翻滚与俯仰,因此BLOCK ⅡR卫星的PCO改正不受偏航姿态异常的影响[23,24]。
图8给出相应于图6中JFNG站G07(BLOCK ⅡR)子午机动观测值残差变化图,太阳高度角β从0.15°增加到0.19°,卫星高度角随时间变化呈现先上升后下降的趋势,从65°变化到约57°。由图8可以看出,不同分析中心的产品所得到的观测值残差差异较大,使用GFZ、CNES所提供的精密轨道和钟差观测值残差分别高达8、4 cm,这可能是由于GFZ、CNES分析中心在G07(BLOCK ⅡR)卫星太阳高度角绝对值|β|较小时,所采用的姿态控制策略存在略微差异。在近日点(noon)附近,采用模型姿态,观测值残差均得到了有效降低,随着名义偏航角与模型偏航角差异的增大,所对应的观测值残差也逐渐增加。

图6 G07(IIR)子午机动偏航角变化Fig.6 Variation of the yaw angle of G07 (IIR )during noon turn
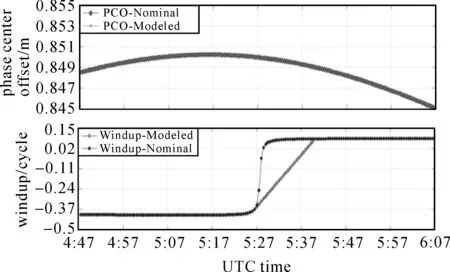
图7 G07(IIR)子午机动PCO与相位缠绕变化Fig.7 Phase wind-up and antenna correction of G07 (IIR) during noon turn

图8 G07(IIR)子午机动观测值残差变化Fig.8 Residual variation of the observation value of G07 (IIR) during noon turn
2.2 GALILEO卫星不同姿态模型对PPP观测值的影响与分析
为突出GALILEO卫星采用不同姿态模型对PPP载波相位观测值残差的影响,本文对同一时段机动的GPS卫星进行剔除,选取NKLG站的GPS+GALILEO观测数据,采用CNES、GFZ分析中心所提供的精密轨道和钟差产品,并对IOV、FOC卫星的子午机动偏航角、观测值残差时间序列图进行分析。
图9给出了在2016年DOY180d E11(IOV)卫星子午机动名义偏航角与模型偏航角变化图,太阳高度角β≈0.43°。从图9可知,模型姿态偏航角变化是一条光滑的曲线,IOV卫星机动时间大约1 h 10 min,姿态翻转近180°。由于IOV卫星采用动态动偏的姿态控制策略,相较GPS卫星,即使在太阳高度角β角接近于0的情况下,名义偏航角与模型偏航角差异不大,最大约为30°。图10、图11给出了E11卫星在此期间的PCO改正、相位缠绕与观测值残差变化图,太阳高度角β从0.02°变化到0.19°,卫星高度角从57°变化到约37°。结合图10和图11可以看出,在机动开始时名义偏航角与模型偏航角差异不明显,PCO改正、相位缠绕与观测值残差差异较小,接近近日点附近时,两种姿态模型对PCO改正、相位缠绕的影响分别能达到约0.2周、1 cm的差异,此外,从图10可以看出各分析中心名义偏航角观测值残差逐渐增大,且曲线趋势一致,最大能达到3 cm。

图9 E11(IOV)子午机动偏航角变化Fig.9 Variation of the yaw angle of E11(IOV)during noon turn

图10 E11(IOV)子午机动PCO与相位缠绕变化Fig.10 Phase wind-up and antenna correction of E11(IOV)during noon turn
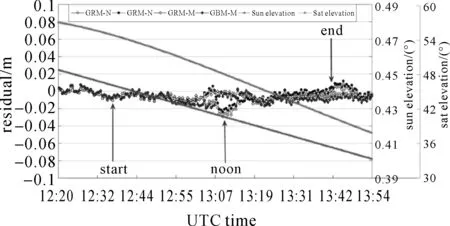
图11 E11(IOV)子午机动观测值残差变化Fig.11 Residual variation of the observation value of E11(IOV)during noon turn
图12给出2016年DOY210d E24(FOC)卫星子午机动名义偏航角与模型偏航角时间序列图,太阳高度角β≈0.18°,机动时间约40 min。相较IOV卫星,机动时间减少,在近日点附近名义偏航角与模型偏航角相差约为为80°。图13、图14给出了相应图12的E24子午机动PCO、相位缠绕与观测值残差时间序列图,太阳高度角β从0.21°变化到0.15°。从图13可以看出不同姿态模型将对PCO、相位缠绕最高造成分别约0.2周、1 cm的差异。由图14可知,各分析中心观测值残差变化趋势一致,在近日点附近,由于较小的太阳高度角β将导致短时间内卫星姿态急剧翻转,若采用名义姿态计算PCO与相位缠绕,会造成观测值残差的增加,最大能达到10 cm,使用模型姿态,观测值残差能降低到6 cm。

图12 E24(FOC)子午机动偏航角变化Fig.12 Variation of the yaw angle of E24(FOC)during noon turn
2.3 GPS/GALILEO卫星不同姿态模型对仿动态PPP定位结果的影响
为验证GPS/GALILEO卫星姿态改正模型在仿动态PPP定位结果的正确性与有效性,本文选取JFNG跟踪站2016年DOY181d(即图6时间段)的GPS+GALILEO观测数据,并设计名义姿态(Nominal)、模型姿态(Modeled)与卫星剔除(Delete)3种策略对定位结果进行分析,基于CNES分析中心提供的精密轨道与钟差,将SNX文件提供的JFNG站参考坐标作为真值,采用仿动态PPP浮点解进行解算,其中坐标参数与钟差采用单历元估计[21,25]。
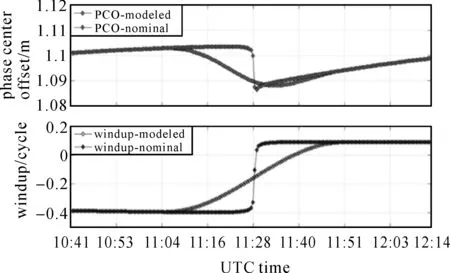
图13 E24(FOC)子午机动PCO与相位缠绕变化Fig.13 Phasewind-up and antenna correction of E24(FOC)during noon turn
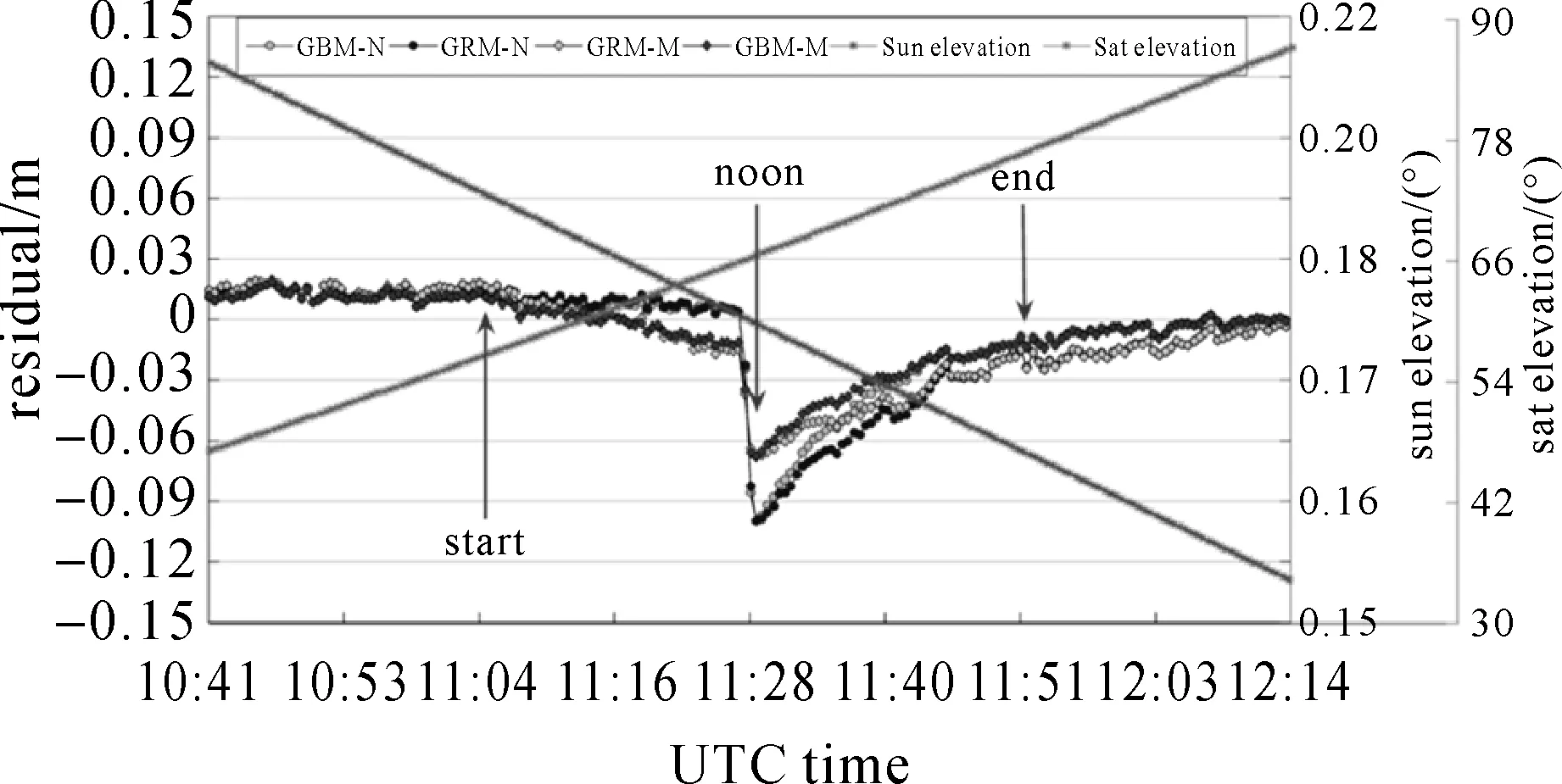
图14 E24(FOC)子午机动观测值残差时间序列图Fig.14 Residual variation of the observation of E24(FOC)during noon turn
图15是JNFG跟踪站仿动态PPP在E、N、U 3个方向定位偏差图,从图15中可以看出,在虚线Ⅰ、Ⅱ区域GPS、GALILEO卫星都有不同程度的机动。在区域Ⅱ中由于受多颗卫星机动的影响,模型姿态策略较名义姿态策略有较显著的提升,在部分时刻提升幅度能达到约4 cm。与剔除卫星策略相比较,模型姿态策略在E、N方向定位结果差异较小,约为2 cm。图16给出了相应图15的PDOP与卫星数量变化图,由图16可知,GPS/GALILEO双系统定位可用卫星数量约为13颗左右,PDOP值约为0.8。在区域Ⅰ、Ⅱ中,相较剔除卫星策略,模型姿态策略在卫星分布几何图形强度得到一定程度的改善,进一步确保了定位精确性与可靠性。图17给出了在机动区域(即Ⅰ、Ⅱ区域)3种策略下的均方根误差(RMS)。从图17中可以看出,与其他两种策略相比,模型姿态策略的动态PPP均方根误差在水平方向上优于其他两种策略,在U方向上,3种策略相当。

图15 动态PPP位置解算示意图(标识有G24等下划线区域表示卫星姿态异常时期)Fig.15 Positioning error of dynamic PPP(the underlines marked G24,represent abnormal yaw attitude of satellites for a period)
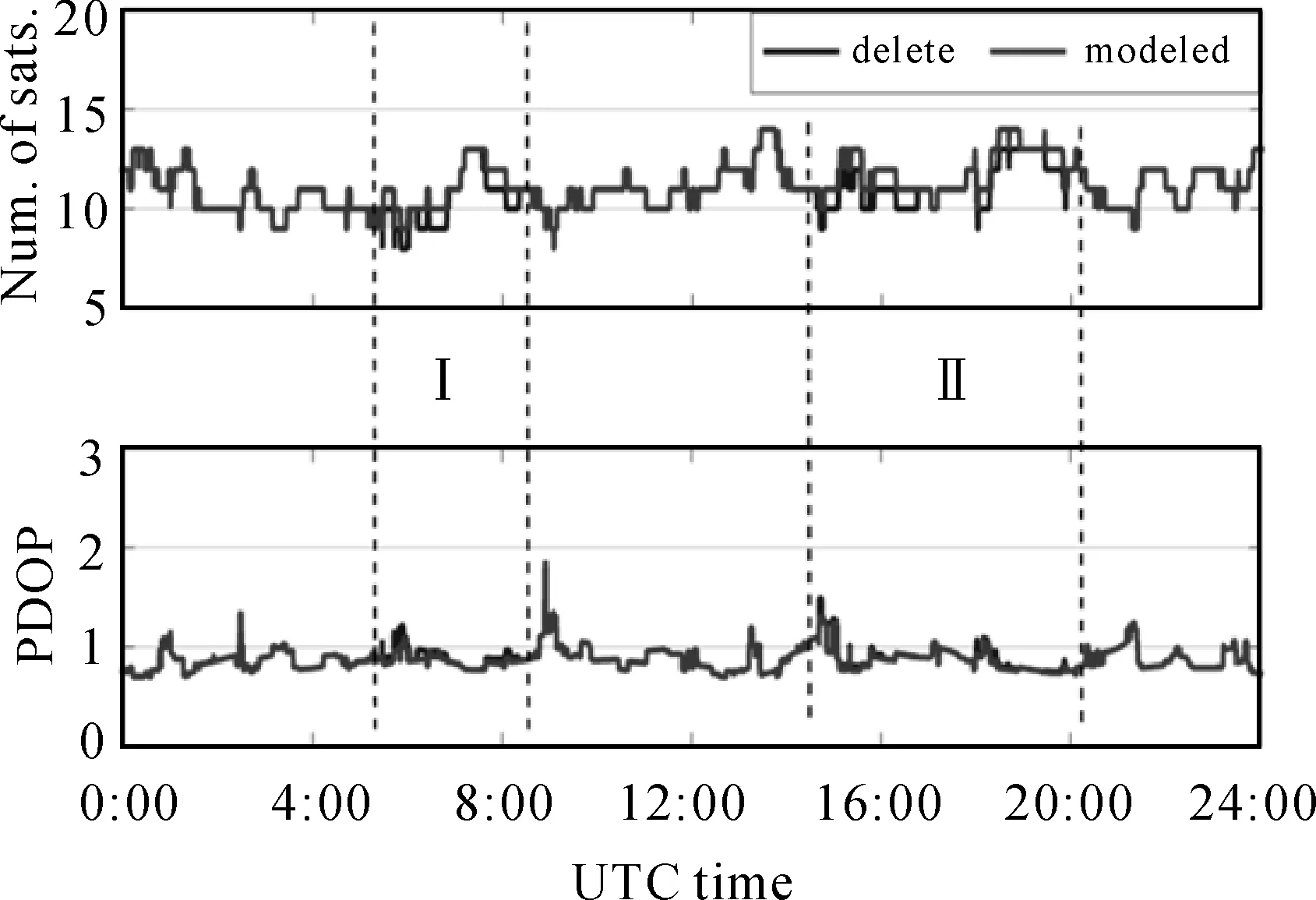
图16 卫星数量与PDOP变化图Fig.16 The number of satellites and the change diagram of PDOP
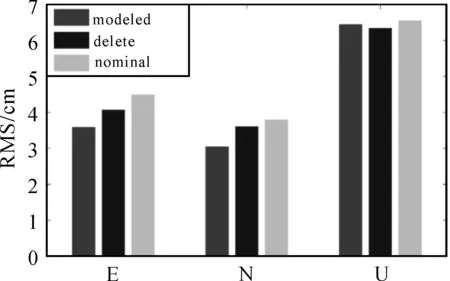
图17 卫星姿态异常区域Ⅰ、Ⅱ动态PPP定位结果的RMSFig.17 RMS of dynamic PPP positioning results in satellite abnormal area Ⅰ、Ⅱ
为进一步统计GPS/GALILEO卫星不同改正模型对动态PPP定位结果的影响,本文选取2016年DOY 202—212期间7个MGEX跟踪站GPS+GALILEO观测数据,在卫星偏航姿态异常时期,分别统计了采用模型姿态、剔除卫星策略相较于名义姿态定位精度的提高幅度。图18给出7个MGEX跟踪站在E、N、U 3个方向的RMS,综合各测站的定位结果可以看出,与名义姿态相比较,模型姿态与剔除卫星策略对定位结果都有一定的提高,并且大部分测站模型姿态策略优于剔除卫星策略。表1统计了图18中3个方向的最大提高率、平均提高率以及模型姿态策略相对于剔除卫星策略提高率。从表1可以看出,与名义姿态相比,模型姿态在E、N、U 3个方向的RMS分别提高了13.3%、15.77%、12.98%,与剔除卫星策略相比,模型姿态在E、N、U 3个方向的RMS可分别提高5.399%、4.430%、5.992%。因此,用户在卫星偏航姿态异常时期应使用姿态模型,避免使用名义姿态而错误地计算PCO与相位缠绕改正,导致定位结果的估值不准确。
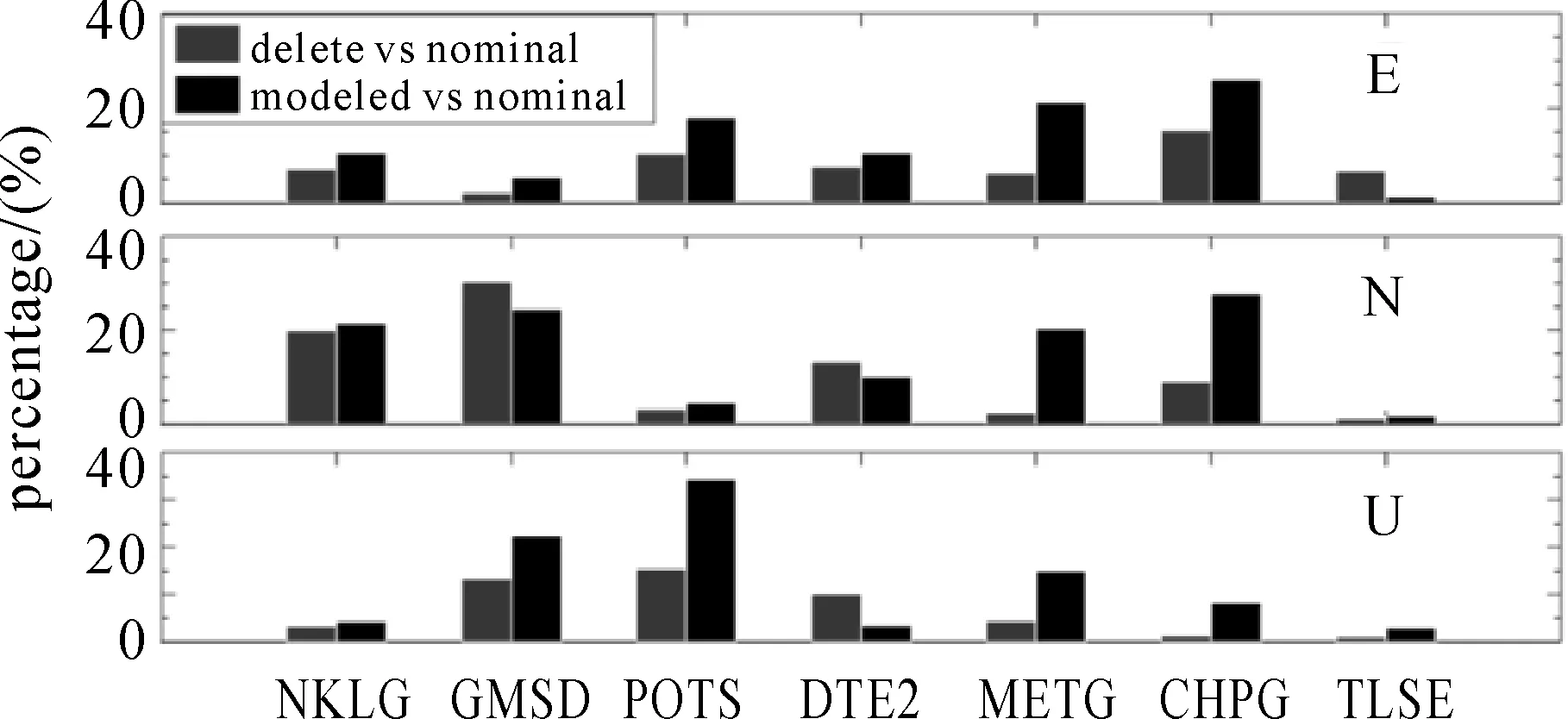
图18 卫星姿态异常时期各策略相对名义姿态定位精度提高率Fig.18 Improvement rate of positioning precision of each strategy relative tonominal attitude in satellite abnormal area
表1卫星姿态异常时期各策略相对名义姿态定位精度提高率
Tab.1Improvementrateofpositioningprecisionofeachstrategyrelativetonominalattitudeinsatelliteabnormalarea(%)

3 结论与展望
本文基于不同分析中心所提供的精密轨道和钟差产品,采用不同姿态改正策略,分析了GPS、GALILEO卫星姿态异常时期天线相位中心改正、相位缠绕改正对观测值残差及动态PPP定位结果的影响,得到以下结论:
(1) 在卫星姿态异常时期,GPS、GALILEO卫星采用不同的姿态控制策略,若采用名义姿态计算天线相位中心偏差与相位缠绕误差改正,能对GPS、GALILEO卫星观测值残差分别造成高达8、10 cm的影响,采用姿态改正模型可将观测值残差分别降低至2、6 cm以内。
(2) 根据JNFG跟踪站的GPS+GALILEO观测数据进行仿动态PPP试验,当多颗卫星处于姿态异常时期,采用模型姿态的定位结果优于名义姿态、卫星剔除策略,部分时刻在E、N方向上的差异可达2~4 cm。
(3) 基于7个MGEX跟踪站连续10 d的实测数据,针对处于姿态异常时期的卫星,与名义姿态相比,采用模型姿态的仿动态PPP定位结果在E、N、U 3个方向定位精度分别提高了13.3%、15.77%、12.98%,与剔除卫星策略相比,模型姿态在E、N、U 3个方向的定位精度可分别提高5.399%、4.430%、5.992%。
(4) 由于各分析中心在卫星姿态异常时期所基于的策略可能存在差异,导致卫星精密钟差产品吸收一部分由姿态引起的偏差。因此,用户在使用不同分析中心产品时,应明确其异常时期所采用的策略,选取相应的姿态模型进行改正,才能确保定位结果的精确性与可靠性。
