基于慧鱼创意组合模型的钱币整理机的设计与制作
2018-12-27沈松琛徐伯起马赛克
张 颖,沈松琛,徐伯起,陈 栋,马赛克
(海军航空大学 山东 烟台 264001)
基于慧鱼创意组合模型的钱币整理机的设计与制作
张 颖,沈松琛,徐伯起,陈 栋,马赛克
(海军航空大学 山东 烟台 264001)
针对每天钱币巨大的直接交易量且人工整理钱币效率低下的问题,提出应用慧鱼创意组合模型设计并制作一款自动化设备来部分代替人工整理钱币。利用直径差分原理与颜色差分原理对第五套人民币进行分类,再通过收纳筒接收硬币、机械手转移纸币到整理盒实现了钱币的整理功能。
慧鱼创意组合模型;自动化;ROBO Pro软件
1 引言
慧鱼创意组合模型(Fischertechink Model)诞生于德国,主要由机械构件、电器构件、传感器、控制器和软件组成,是一种模块化、可拼装、灵活、易扩充的创新实践工具。利用这些零件可以实现无限多的组合变化,弥补传统实验中的缺陷,能够完成创新构思的实现、提升的学习兴趣和动手实践能力[1]。并且,机器人教育是目前创新教育的热点,慧鱼机器人是教学机器人中应用最为广泛的一种,慧鱼机器人组件采用优质工程塑料,以“六面拼接体技术”为基础,可以反复的拆装,还原科学原理,展示技术模型,因此慧鱼模型被诸如IBM、西门子等很多公司采用,用以验证生产流水线[2]。
针对公共交通行业、小商品市场、银行单位等对于现金钱币整理效率较低的问题,利用慧鱼创意组合模型,设计制作了一款钱币整理机,来部分代替人工进行钱币的分类、清点和整理。
2 自动化钱币整理机功能
钱币整理机主要完成对零散硬币和平整纸币的分类整理任务,减少钱币分拣过程中人的工作量,提高分拣效率[3]。钱币整理机(如图1所示)通过慧鱼模型搭接完成,主要利用钱币物理特性差别,将其分类再逐一放置于指定位置。钱币整理机采用双层功能分区布置,下层为控制区,主要由电源、各种控制板及气泵组成;上层为功能区,主要完成各种钱币的分拣[4]。
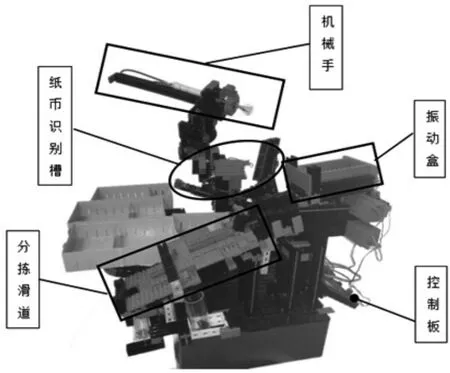
图1 钱币整理机
在上层功能区中,同步并行完成硬币与纸币的分拣,功能流程如图2所示。硬币放入振动盒中,而纸币放入纸币识别槽内。启动钱币整理机后,通过振动盒的周期性振动使硬币下滑进入分拣滑道中,利用硬币直径尺寸的物理差异性,完成不同硬币的分类;纸币在纸币识别槽中,通过颜色传感器利用颜色的差异性,对其纸币面值进行识别,而机械手根据识别结果完成纸币的抓取并放置到相应的整理盒内。
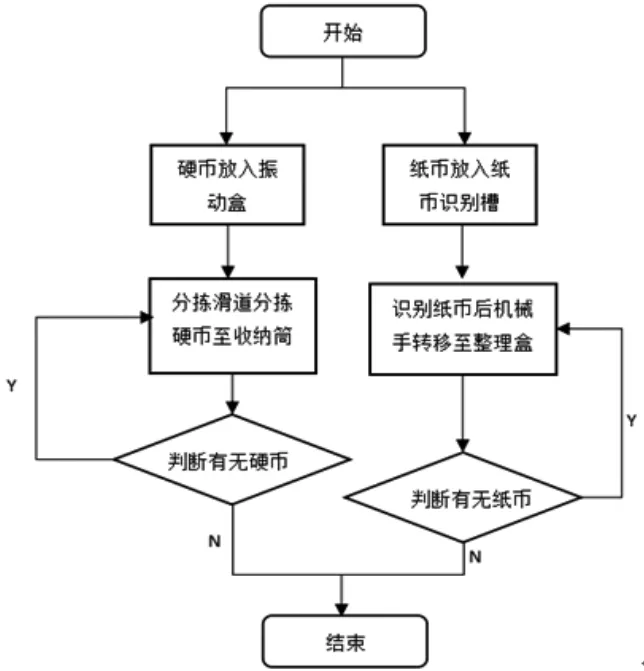
图2 功能流程图
3 硬币整理部分的设计
3.1 硬币特征分析
为了完成硬币的分拣,首先对现行流通硬币的物理特性进行分析比对(如表1所示)。在厚度方面,一角与五角的尺寸差为0.02mm,五角与一元的尺寸差为0.20mm,不同硬币的厚度尺寸差异性太小;在硬币重量方面,一角与五角的重量差为2.65g,一角与一元的重量差为4.95g,差异性较为明显,但由于使用过程中的杂质沾染,硬币重量的稳定性较差,因此不适用于分拣;在硬币的颜色方面,一角和一元最为接近均为金属白,五角为金黄色与其他硬币差异较大,虽然视觉差异性明显,但硬币的金属表面光滑,颜色识别器无法准确读出有差别的数值;在硬币的直径尺寸方面,一角与五角的直径差为1.50mm,一元与一角的直径差为6.00mm,而五角与一元的直径差为4.50mm,直径差异均较为明显。
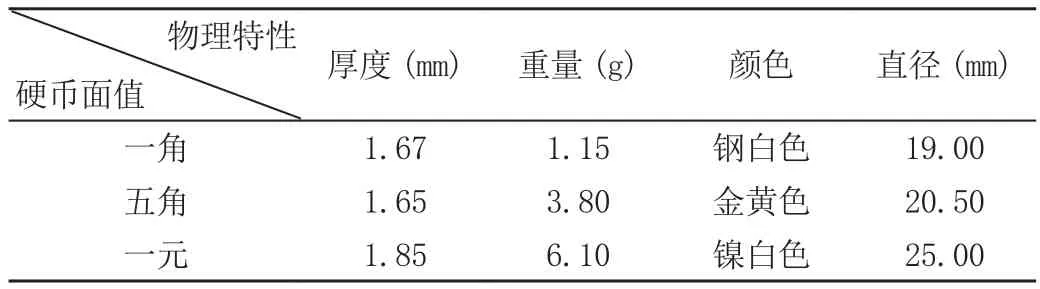
表1 硬币物理特性分析比对表
通过对硬币厚度、重量、颜色、直径四方面的物理特性进行分析比对,不同面值的硬币在厚度上的差异性较小,而重量受使用过程中的杂质沾染的影响较大,因此重量稳定性较差,而颜色方面也会因使用磨损而影响辨别。综合考虑硬币物理特性与差异性,选取利用硬币的直径尺寸差异性,设计并完成不同硬币的分拣。
3.2 硬币分拣机构设计
3.2.1 硬币分拣流程 根据表1中对硬币不同物理特性的测量与分析,利用直径差分原理,设计滑道式分拣结构,借助硬币自重实现硬币沿滑道的下滑。
滑道式分拣结构由两级滑道组成:1级滑道完成一元硬币的分拣,而五角与一角的硬币落入2级滑道;2级滑道完成一角硬币的分拣,而五角硬币继续滑行落入收纳筒中。
3.2.2 硬币分拣结构设计
(1)振动盒
振动盒通过凸轮的旋转带动硬币盒周期性振动,为盒内硬币的流出提供初始动力。
为了保证硬币流出时不相互叠压,因此振动盒的出口处还相应的设计了活动挡板,完成对叠压硬币的推平,使得硬币逐一进入分拣滑道中。
活动挡板包含横放挡板和斜放挡板。横放挡板主要用于限制每次抖出的硬币数量,斜放挡板则是防止硬币叠压在横放挡板前造成硬币卡死在出口处。
(2)分拣滑道
分拣滑道由两侧滑板及滑板中间形成的中空区两部分组成。滑板实现对大直径硬币的支撑,并引导其下滑至相应的收纳筒中。滑板中间形成的中空区主要实现较小直径硬币的抛落。
如图3所示,在一级分拣滑道中,滑板中间形成的中空区的间距D2大于五角硬币的直径d五角,滑道两侧的滑板间距D1略大于一元硬币直径d一元,这样能够保证一元硬币沿两侧滑板形成的引导路径下滑,而一角与五角则通过滑板中间形成的中空区拋落入二级滑道。
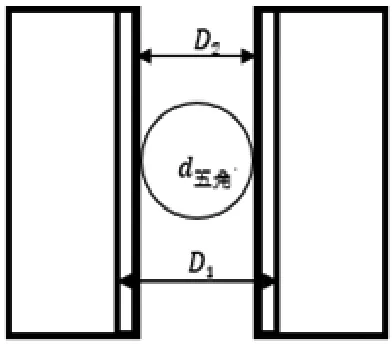
图3 一级分拣滑道原理示意图
二级分拣滑道利用同样的方法实现对一角、五角的分拣。经过反复试验,确定分拣滑道上的滑板间距与中空区间距尺寸,实现不同面值硬币的分拣功能。
3.2.3 撞角与收纳筒 为了改变已拣出的硬币运动方向,在各级分拣滑道末端上方设计有挡板撞角,硬币碰上撞角后,改变其运动方向并降低速度,以便于更好地沿导路下滑至收纳筒中。
收纳筒用于收纳已分拣出的硬币,且收纳筒上标识有刻度线,便于清点硬币数目。
4 纸币整理部分的设计
4.1 纸币特征分析
现行流通纸币共有八种面值,在没有图像处理的情况下,需要充分考虑其自身物理特性用于完成面值的识别。现行纸币质地较为柔软,不同面值的纸币厚度近似相同,而其宽度尺寸差异小于长度尺寸差异,不同面值的色调不同且分布呈对称性。
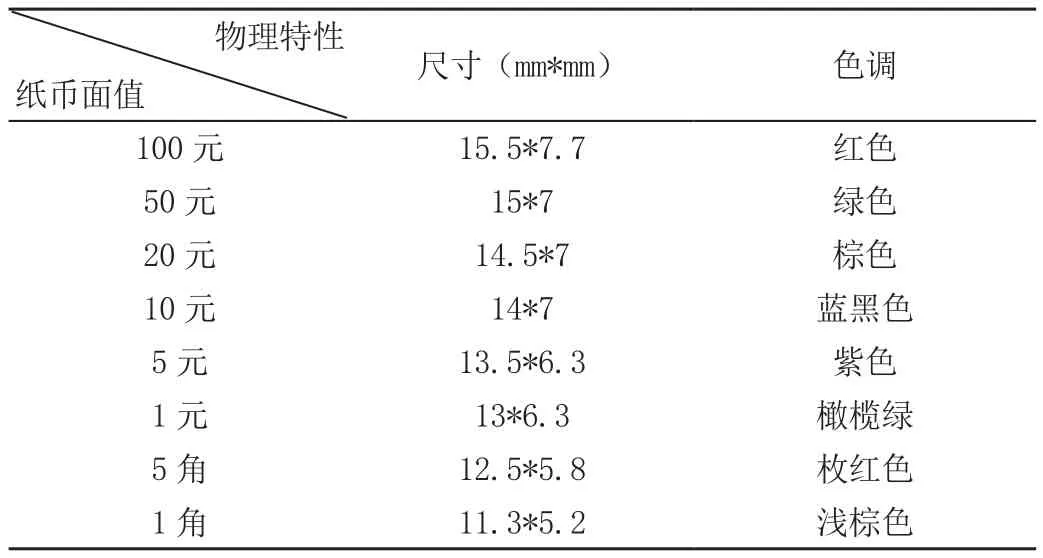
表2 纸币实测数据
由表2纸币特性数据可知,颜色方面的差异性比尺寸上的差异性更明显。因此,利用对纸币上不同位置进行颜色数值读取,而后与程序原有数据进行比对,差别最小的一组数据所对应的就是当前纸币的面值——这就是颜色差分原理。
4.2 纸币分拣机构设计
4.2.1 纸币分拣流程 平铺的纸币通过颜色传感器对其特定位置进行颜色读取,并与设置的数据进行比对,完成纸币面值的识别。计算机通过比对完成对纸币的面值识别后,控制机械手根据识别结果将纸币放置于对应的整理盒中。
4.2.2 纸币分拣结构设计及程序编制 纸币分拣主要由纸币识别槽、机械手和整理盒三部分组成。纸币识别槽用于放置未分拣的纸币,其盖板上集合了多个颜色传感器用于完成纸币面值的识别,机械手主要用于纸币的抓取和放置,而整理盒用于收纳分拣后的纸币。为了使作品结构紧凑,纸币识别槽和整理盒以机械手为中心环形布置[6]。
(1)面值识别
作品通过颜色传感器进行多点读取,完成纸币面值的识别。在识别过程中,为了提高多点识别的精度,首先要确保纸币的放置位置。通过倾斜纸币识别槽,使平铺放置的纸币依靠重力作用,自然聚于纸币槽一侧,以确保识别前纸币的位置,为准确识别提供位置保障。
其次,利用颜色传感器进行识别,需要消除光线的干扰。主要包括环境光线和传感器光线两方面的光线干扰。为了减少环境光线的影响在识别槽支架上添加了绿色补光灯;为了消除传感器自身光线的相互干扰,颜色传感器都放置于纸币识别槽盖板内槽中,并在传感器之间用隔板进行分割,再利用黑胶带填补空隙,阻挡光线进入其他传感器的识别区,减少传感器间相互影响。以此提高识别精度。如图4所示。
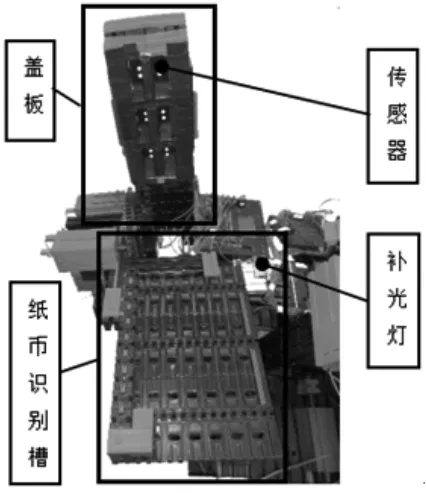
图4 纸币识别槽图
(2)机械手
当传感器将识别的数据传入至电脑中,完成数据判断并确定面值后,分拣机械手从纸币槽中拣出纸币,并放置于相应的整理盒中。
为了确保机械手每次仅拣出一张纸币,作品利用真空吸盘进行抓取,通过反复调试确保不会吸出多张叠放的纸币。
由于整理盒与纸币识别槽围绕机械手环形分布,因此分拣机械手利用齿轮转动实现了机械手的水平转动和空间俯仰运动,利用齿条传动实现了机械手的伸缩运动。
(3)分拣程序
纸币分拣程序包括复位程序、面值判断程序、机械手运动程序。
“复位程序”是为了确保作品分拣工作开展前的初始状态。通过对各个位置上的微动开关状态进行检测、复位,完成初始状态的调整。复位完成后进入“面值判断程序”,不管当前纸币识别槽中是否有纸币,面值判断程序都会执行一遍。若没有纸币,则跳出主程序结束当前工作[9]。
若检测到纸币,面值判断程序中通过调用差值计算子程序进行数据计算,每一个传感器的传回数据与程序中的原有数据相减,最后各个差值相加并和限定值比较,如果大于限定值则跳出该面值判断程序进入下一个面值判断程序;如果小于限定值,则机械手运动程序根据面值判读程序的结果,控制机械手吸出纸币并放置于相应的整理盒中,完成纸币的分拣。过后,机械手复位,盖板盖下开始下一张纸币的整理。
5 结语
作品利用直径差分原理完成硬币分拣,而纸币则是利用颜色差分原理实现面值识别,钱币整理机实现了纸币和硬币的同步整理,部分代替了人工。
通过该项作品的设计、结构搭接、创新调试,直至功能完善,深化了团队成员对机电知识的理解和应用,同时动手能力、问题分析能力和解决能力都得到了充分的锻炼和提高,并为后续创新实践的开展奠定了基础、积累了经验。
[1]韩蕾,郑轩,孙雪.慧鱼创意组合模型的实践与开发[J].机电技术,2010(05).
[2]曲凌.慧鱼创意机器人设计与实践教程[M].上海:上海交通大学出版社,2010.
[3]张继平,宋岩.机械创新设计实验 2009(03).
[4]曹国忠,郭海霞,檀润华等.面向功能创新的功能进化、组合与失效研究[J].机械工程学报,2012,48(11):29-38.
TP242.2 【文献标识码】A 【文章编号】1009-5624(2018)01-0081-03
张颖(1983-),女,山东烟台人,硕士研究生,工程师,研究方向:机械实验教学及创新设计;
沈松琛(1996-),男,福建漳州人,本科生,专业:飞行器动力工程。
