Analysis of the dynamic performance of an electrohydrostatic actuator and improvement methods
2018-12-26ZhihuiLIYaoxingSHANGZongxiaJIAOYanLINShuaiWUXiaobinLI
Zhihui LI,Yaoxing SHANG,Zongxia JIAO,Yan LIN,Shuai WU,Xiaobin LI
School of Automation Science and Electrical Engineering,Beihang University,Beijing 100083,China
Science and Technology on Aircraft Control Laboratory,Beihang University,Beijing 100083,China
KEYWORDS Dynamic characteristic;Motor-pump group;Power requirement;Rotational inertia
AbstractAs a kind of actuation mechanism for power-by-wire(PBW)actuation systems of more/all electrical aircraft,an electro-hydrostatic actuator(EHA)is a highly integrated local hydraulic actuation system.It is a volume control system consisting of a motor,a pump,an actuator,etc.,which has features of high efficiency and reliability.However,the poor dynamic characteristic is one of the main factors restricting its wide application in aircraft.In this paper,the reason for the poor dynamic characteristic of an EHA is revealed from the perspectives of the natural frequency characteristic and the power requirement,respectively.In other words,the insufficiency of the motor output power at a high frequency is the main factor causing the poor dynamic characteristic of the system,and methods which include increasing the maximum output torque of the motor,reducing the rotational inertia of the motor-pump group,and adopting a double-motorpump group configuration are proposed in this paper,by which the dynamic characteristic of the system can be improved.The feasibility of those methods are verified by simulations.Finally,the dynamic characteristic is tested on an EHA prototype,and results show that saturation of the output torque of the motor is the main factor restricting the dynamic characteristic of the EHA system.?2018 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is anopenaccessarticleundertheCCBY-NC-NDlicense(http://creativecommons.org/licenses/by-nc-nd/4.0/).
1.Introduction
An electro-hydrostatic actuator(EHA)is a kind of actuation mechanism of power-by-wire(PBW)actuation systems for more/all electrical aircraft.1–3It is a volume control system consistingofamotor,apump,atransmission,atank,etc.,whichisa highly integrated local hydraulic actuation system.4–6It has the advantages of small size,light weight,high efficiency,and good reliability compared with a traditional hydraulic actuation system,and thus it is the focus of current research all over the world.7–9However,there are two main technical problems in an EHA system:poor dynamic characteristic and serious heating of the motor under a low-speed and heavy-load state,wherein the poor dynamic characteristic is one of the main factors restricting wide applications.10,11An EHA system with a high dynamic characteristic is one of the essential conditions forinstallationofmore/allelectricalaircraftandhassignificance in engineering practice.Thus it is essential to improve the dynamic characteristic of an EHA.In this paper,the dynamic characteristic of an EHA system is analyzed.
Recently,high-speed and high-pressure EHA-FPVMs are the main research subject.For example,the EHA researched by LIEBHERR Company in Germany is capable of working under a motor speed of 16,000 r/min and a system pressure of 35 MPa,and EHAs researched by Safran-Messier-Bugatti Company in France as well as UTC-Goodrich EHAs can work underamotorspeedof20,000 r/minandasystempressureof35 MPa.A high-speed motor is beneficial to improving power density,reducingcurrent,andsignificantly reducingmotor heating.However,there is no explicit detailed statement on the dynamic characteristicofanEHAsystem.Forthedynamiccharacteristic of an EHA,researchers have conducted numerous studies on EHA systems mainly from the perspective of control.The non-linear PID control method is proposed by Fan Jizhong,which has a better dynamic characteristic compared with those of conventional PID control methods.12With respect to the influences of uncertain factors in an EHA on the system characteristic,an application of fuzzy neural network adaptive backstepping control is proposed by Han Me Kim et al.,which can decrease the tracking error caused by uncertain factors of the system,and the system has good tracking performance and robustness.13The optimum control on feedback linearization of an EHA-VPVM is proposed by Zhang Ye et al.,which can effectively suppress the error caused by external force disturbance.14–16In one word,one aspect of the research on an EHA system is to suppress the problem of external disturbance,andanotheroneistoimprovesystemperformancefromtheperspective of control.However,the above methods mainly improve the tracking error from a control algorithm.17–19
In this paper,the dynamic characteristic is analyzed mainly based on the current situation of an EHA system.Since an EHA involves many disciplines such as mechanics,electrics,hydraulics,thermotics,and control,its dynamic characteristic mainly includes motor dynamic,mechanical structure dynamic,hydraulic dynamic,and other segments dynamics;the natural frequency characteristic and the power requirement of each section are analyzed respectively,and the main factors that influence the dynamic characteristic of an EHA system are revealed.Then,main methods of improving the dynamic characteristic are also proposed:increasing the maximum output torque of the motor,reducing the rotational inertia of the motor-pump group,and adopting a double-motor-pump group configuration.20,21
The structure of this paper is as follows.Section 2 analyzes the dynamic characteristic of each subsystem of an EHA.In Section 3,the load characteristic and power requirement of each subsystem are analyzed.Methods of improving the dynamic characteristic verified by simulation are proposed in Section 4.Then,experimental result are described.Finally,conclusions are presented.
2.Analysis on the dynamic characteristic of each subsystem of the EHA
2.1.Natural frequency of the hydraulic subsystem
An EHA is a typical pump-control system,in which a hydraulic pump is driven by a brushless DC motor to output fiow,thereby the output displacement of the actuator is controlled by the fiow.The structure diagram of an EHA system is shown in Fig.1.
An EHA has the characteristics of heavy leakage of a hydraulic pump,and the leakage of the pump includes the internal leakage which is the leakage between the two chambers and the external leakage which is the leakage between the high-pressure chamber and the return port.Wherein,the external leakage is the main path of the pump leakage.However,as an EHA system belongs to a closed system and the hydraulic oil in the return port enters another chamber of the pump through a charge circuit,therefore,it is assumed that the external leakage is considered as the internal leakage,and the leakage caused by pump rotation is ignored when building a model of the hydraulic section in an EHA.22,23
The fiow equation of the pump is

where Qfis the output fiow of the hydraulic pump;Dpis the displacementofthepump;nisthespeedofthemotor-pumpgroup;Cipis the comprehensive leakage coefficient of the hydraulic pump;Plis the load pressure of the hydraulic system.
The fiow continuity equation of the actuator is

where Aais the effective action area of the actuator;x is the output displacement of the actuator;Vlis the volume connecting the pump and the actuator;Ciais the leakage coefficient of the actuator;beis the elastic modulus of hydraulic oil.
The dynamic equilibrium equation of the actuator is

where mais the mass which is equivalent to that of the actuator;Bais the damp coefficient which is equivalent to that of the actuator;Flis the load force acting on the actuator.
Combining the mathematical model defined by Eqs.(1)–(3),the transfer function of the hydraulic section is

where Ci=Cip+Ciais the total leakage coefficient of the hydraulic system.
The hydraulic natural frequency of the EHA system is

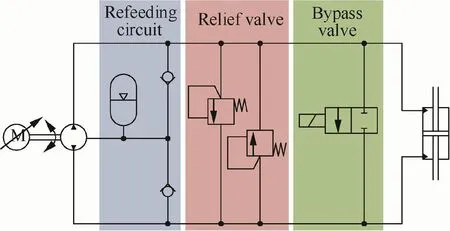
Fig.1Structure diagram of an EHA system.
where xnis the hydraulic natural frequency of the EHA system.
The hydraulic natural frequency of the EHA is different from the natural frequency of the valve control system,for which the main reason is that the leakage rate of the pump is heavy and cannot be ignored,and the leakage increases the hydraulic natural frequency.
The velocity amplification coefficient of the open-loop system is

where Kvis the velocity amplification coefficient.
Considering the leakage rate of the pump,the velocity amplification coefficient will be decreased.The parameters of the hydraulic section of an EHA prototype are shown in Table 1.The hydraulic natural frequency of the EHA system is greater than 225 Hz,and the open-loop velocity amplification coefficient is less than 1.03?10?3.
Remark 1.The EHA is a pump control actuation system,and the theoretical calculation result of the hydraulic natural frequency shows that the hydraulic section is not the main factor restricting the dynamic characteristic of the EHA.The leakage of the pump and the actuator increases the hydraulic natural frequency and decreases the velocity amplification coefficient of the open-loop system.
2.2.Natural frequency of the motor-pump group subsystem
A brushless DC motor is applied to drive the hydraulic pump in the EHA,and the equivalent model of the brushless DC motor is shown in Fig.2.
The voltage balance equation of the brushless DC motor is

where Umis the armature voltage of the brushless DC motor;Rmis the total resistance of the armature circuit;imis the armature current;Lmis the armature inductance;Emis the back electromotive of the armature;t is the test time.
The equation of the back electromotive Emis


Table 1Parameters of hydraulic components in an EHA.
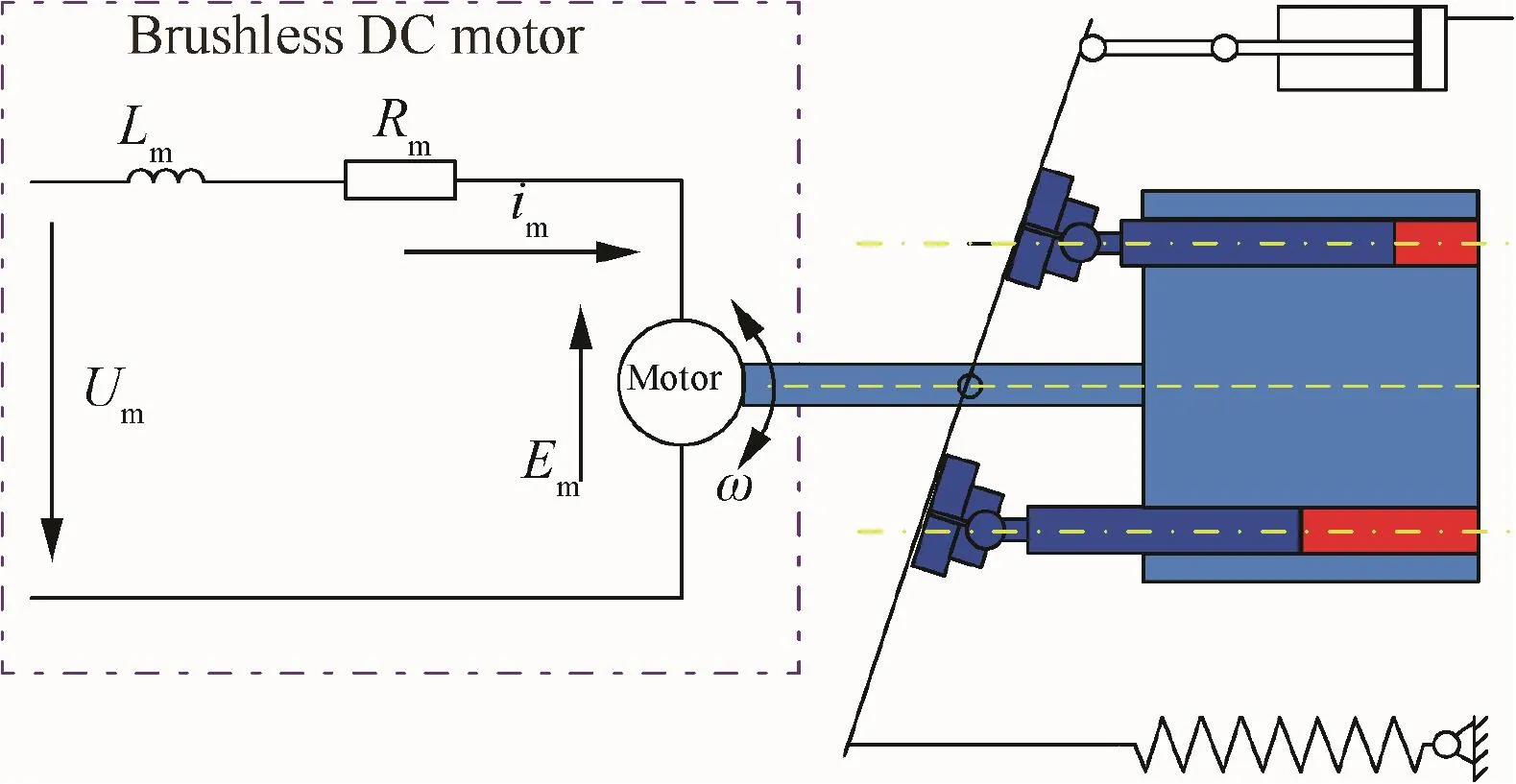
Fig.2Equivalent diagram for motor-pump group.
where Keis the back electromotive coefficient of the motor,and x is the rotary velocity of the motor.
The torque dynamic equilibrium equation of the brushless DC motor is

where Ktis the torque coefficient of the motor;Jmis the total rotational inertia which is equivalent to that of the motor;Bmis the total damp coefficient which is equivalent to that of the motor;Tpis the load torque of the brushless DC motor by which the pump is driven to work,and Tp=DpPl.
Combining the mathematical model defined by Eqs.(7)–(9),the transfer function of the motor section is

Thus,the motor natural frequency of the EHA system is

where xmis the motor natural frequency of the EHA system.
The parameters of the motor section of the EHA prototype are shown in Table 2.The motor driver adopts a dual-loop control which are the current and speed loops,and the noload natural frequency is 30.1 Hz.In the EHA system,considering the rotational inertia of the pump,the natural frequency of the motor-pump group is 24.8 Hz,which affects the bandwidth of the speed loop.The theoretical natural frequency calculation result of the motor-pump group shows that the theoretical natural frequency is not the factor causing a poor dynamic characteristic of the EHA system.
In addition,considering the mechanical resonant frequency of the motor and pump shafts,a finite element analysis of themode of the shafts is carried out using ANSYS?.Results show that the torsional vibration resonant frequency of the motor shaft is 599.8 Hz and that of the pump shaft is 1216.3 Hz;therefore,the serial mode of the motor and pump shafts is 456.2 Hz.The results show that the mechanical resonant frequency of the shafts is not the main factor restricting the dynamic characteristic of the EHA.

Table 2Parameters of the brushless DC motor in EHA.
Remark 2.The natural frequency of each section of the EHA system is not the main reason restricting the dynamic characteristic,and the natural frequency of the motor-pump group is the poorest section of all.
3.Analysis on load characteristics of each subsystem
The power requirement of each subsystem is analyzed in this section.When the frequency signal is tested on the EHA system,different test frequencies need different power requirements for each subsystem.
3.1.Load characteristic requirement of actuator for different frequencies
When the dynamic characteristic of the EHA is analyzed,the sinusoidal command is generally set as the test signal.The full stroke(F.S)1.5%of the actuator is used as the amplitude of the sinusoidal signal for the different frequencies test.The test signal equation of the actuator is

where A is the sinusoidal test signal;a1is F.S.1.5%of the actuator;f is the test frequency of the system.
To analyze the actuator frequency characteristic,it is assumed that the friction of the actuator is ignored and the test system is considered under a no-load condition,and then the kinematics and dynamics of the actuator are analyzed below.The kinematic equation of the actuator is

where vais the movement velocity of the actuator;g is the amplitude attenuation ratio,taking as 0.89125 at 10 Hz.
The kinetics requirement equation of the actuator is

where Tais the motor torque to meet the actuator movement.Themaximumpowerrequirementequationoftheactuatoris

where Pais the power requirement to meet the actuator movement.
According to the system parameters of the prototype,when the actuator works at 10 Hz,the maximum speed of the actuator is equivalent to the speed of the motor,which is no less than 3917.8 r/min;the output force of the actuator is equivalent to the inertia torque of the motor,which is no less than 0.024 N?m;the maximum power requirement of the actuator(i.e.,the output power of the motor)is no less than 5.46 W,and the theoretical calculation result shows that the output power of the motor satisfies the power requirement of the actuator which works at 10 Hz.
The parameters of the actuator are designed by the load,and the power requirement of the actuator in the EHA for the scan frequency is the same as that of the valve control actuation system.
3.2.Load characteristic requirement of the brushless DC motor for different frequencies
To simplify the analysis on the frequency test of the brushless DC motor,it is assumed that the friction of the motor-pump group as well as the internal and external leakages of the hydraulic pump and the actuator are ignored,and the motor-pump-actuator is considered as an ideal system model.The kinematic equation of the brushless DC motor is

The kinetics equation of the brushless DC motor is

where Tmis the motor torque to meet the motor-pump group movement;J is the total rotational inertia of the motor-pump group.
The load characteristic equation of the brushless DC motor is

The power requirement equation of the brushless DC motor is

where Pmis the maximum power requirement.
Under the dynamic characteristic test condition,the maximum rotational speed of the motor-pump group is in a linear relationship with the frequency,the maximum inertia moment of the motor-pump group is in a quadratic relationship with the frequency,and the maximum power requirement is in a cubic relationship with the frequency,as shown in Eqs.(16),(17),and(19).
According to the system parameters of the prototype,the theoretical calculation results of the motor speed,the maximum output torque,the maximum output power of the motor-pump group at different frequencies,and the curve of the maximum power requirement characteristic are shown in Fig.3(a),(b),(c),and(d),respectively.
When the EHA works at 10 Hz,the motor speed reaches at least 3918 r/min,the output torque by the motor is no less than 22.68,and the power output by the motor is no less than 4.6 kW.The actual speed,output torque,and output power of the motor are all greater than the theoretical values in consideration of the efficiency of the system,especially the heavy leakage of the hydraulic pump.The above analytical results show that the bandwidth of the EHA is approximate 7 Hz when the motor of the EHA prototype has a rated output torque of 10 N?m,a speed of 8000 r/min,and an output power of 8 kW.

Fig.3Motor working state at 10 Hz.
Remark 3.According to the analysis on the load characteristic of the motor-pump group,the output torque of the motor is the main factor restricting the dynamic characteristic of the EHA.
4.Methods of improving dynamic characteristic
According to the analysis of the natural frequency characteristic and the load characteristic,it is known that the main factors restricting the frequency characteristic of the EHA system are the load characteristic and the natural frequency of the motorpump group.The methods of improving the dynamic characteristic are reducing the rotational inertia of the motor-pump group,increasing the maximum output torque of the motor,and adopting a double-motor-pump group configuration.
4.1.Reducing rotational inertia of motor-pump group
From Eq.(17),the following equation is obtained:

where Jpis the rotational inertia of the hydraulic pump.
High speed is an obvious feature of the motor-pump group in the EHA system.From Eq.(20),if the rotational inertia of the motor-pump group is reduced,the inertia torque of the motor-pump group in high-frequency movement can be reduced.If the output torque of the motor is constant,it can satisfy the torque requirements of a higher frequency characteristic.In addition,from Eq.(11),reducing the rotational inertia is helpful to improve the comprehensive natural frequency of the motor-pump group and the frequency characteristic of the EHA.
The structure of the hydraulic pump is highly compact,so it is difficult to make structural innovation in the EHA system.Research on selecting lightweight high-strength materials,such as titanium alloy,aluminum alloy,or carbon fiber material,can reduce the rotational inertia.In the case where other indicators are satisfied when designing a motor,the rotational inertia of the motor shaft is reduced as far as possible,that is,the minimum rotational inertia is taken as the new target of motor design.
A simulation model of the EHA is established by the AMESim?software based on the system parameters of the EHA prototype to optimize the rotational inertia of the motorpump group.The rotational inertia is set as the original inertia,reduced by 30%and 54%respectively.Simulation results are shown in Fig.4.If the rotational inertia of the motor-pump group decreases by 54%,the bandwidth of the system will increase from 7 Hz to 10 Hz,and the current saturation of the motor is the main factor constraining the bandwidth of the EHA.The solid green line in the amplitude-frequency curve in Fig.4(a)represents the critical linedB,and the solid green line in the phase-frequency curve represents the critical line.The green lines in the bode diagram have the same expressions in this paper.
4.2.Increasing output torque of motor
From Eq.(20),if the rotational inertia of the motor-pump group is constant,the torque requirement of a higher frequency characteristic can be met by increasing the output torque of the motor.Therefore,it is helpful to improve the frequency characteristic of the EHA system by increasing the output torque of the motor.
Simulation is conducted based on the parameters of the EHA prototype by increasing the maximum output torque of the motor.The maximum output torque is set as 10 N?m,15 N?m,and 20 N?m,respectively.Simulation results are shown in Fig.5.If the maximum output torque increases to 20 N?m,the bandwidth of the system will increase from 7 Hz to 10 Hz,and the current saturation of the motor is still the main factor constraining the bandwidth of the EHA.
The characteristic of the EHA system has higher requirements of not only a high ratio of power to mass and a high speed,but also a high output torque and a small rotational inertia for the motor.The former requirements help to reduce the entire mass of the EHA system,and the latter help to improve the dynamic characteristic of the EHA system.Therefore,the EHA system sets higher requirements for the motor.
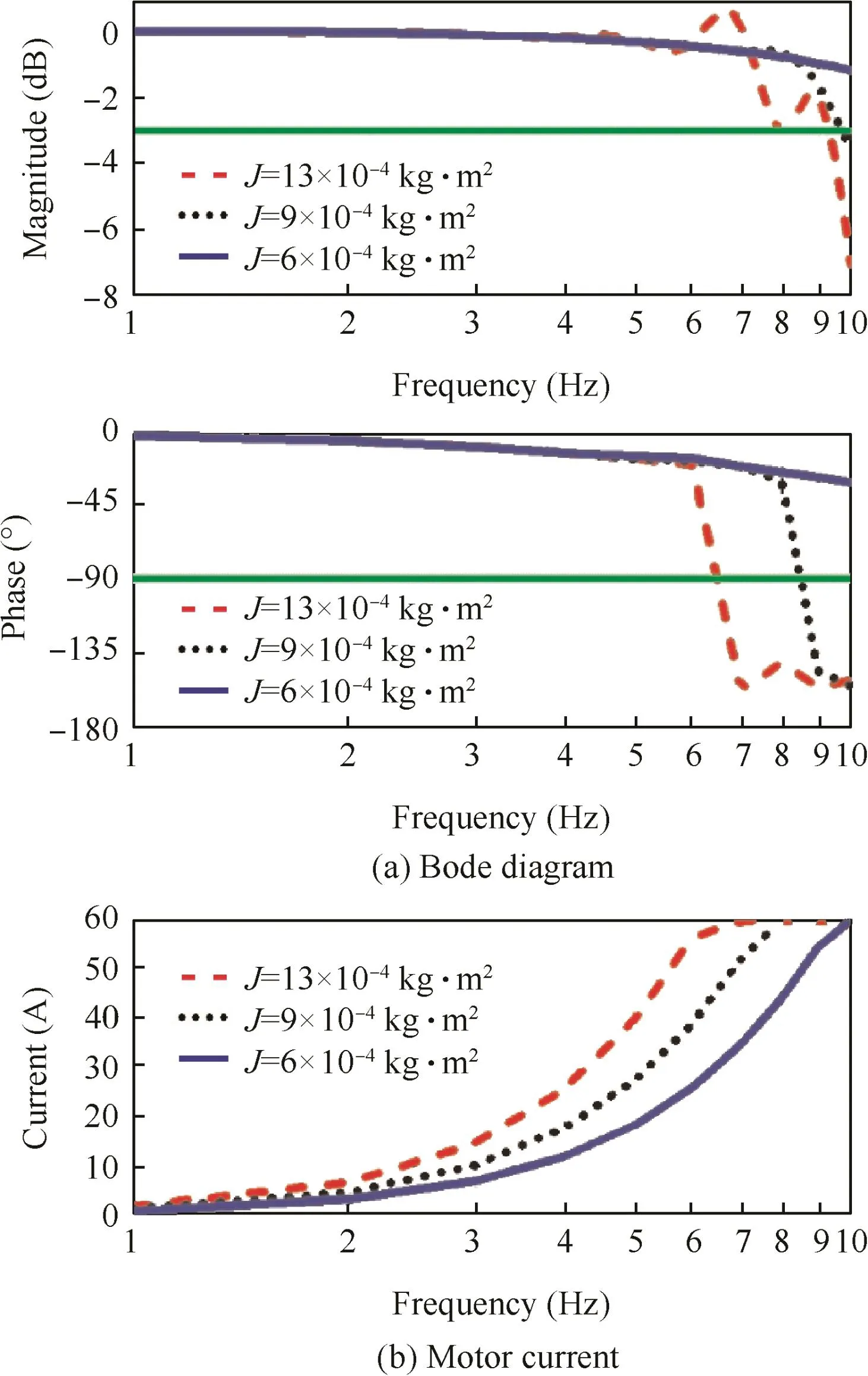
Fig.4Simulation results of optimized rotational inertia.
4.3.Adopting a double-motor-pump group system
The use of a double-motor-pump group configuration not only increases the redundancy and reliability of the system,but also increases the output power of the motor-pump group.If the parameters of the motor and the hydraulic pump are constant,the speed of each motor is reduced by half,and the output torque of each motor remains constant when testing the EHA frequency characteristic.
If the parameters of the motor are not changed and the displacement of the hydraulic pump is reduced by half,it not only reduces the rotational inertia of the pump and increases the natural frequency of the motor-pump group,but also reduces the output torque of each motor while the speed of each motor remains the same when the EHA frequency characteristic is tested.
According to the system parameters of the EHA prototype,comparison simulation is conducted on the double-motorpump group configuration.Simulation results are shown in Fig.6,and with the double-motor–pump group structure,the bandwidth of the system will be increased from 7 Hz to 10 Hz,while the current saturation constraints the bandwidth of the EHA.
According to the system parameters of the EHA prototype,simulation results considering the above three methods comprehensively are shown in Fig.7,which show that the bandwidth of the system will be increased from 7 Hz to 22 Hz by improving the maximum output torque of the motor,reducing the rotational inertia of the motor-pump group,and adopting the double-motor-pump group configuration.
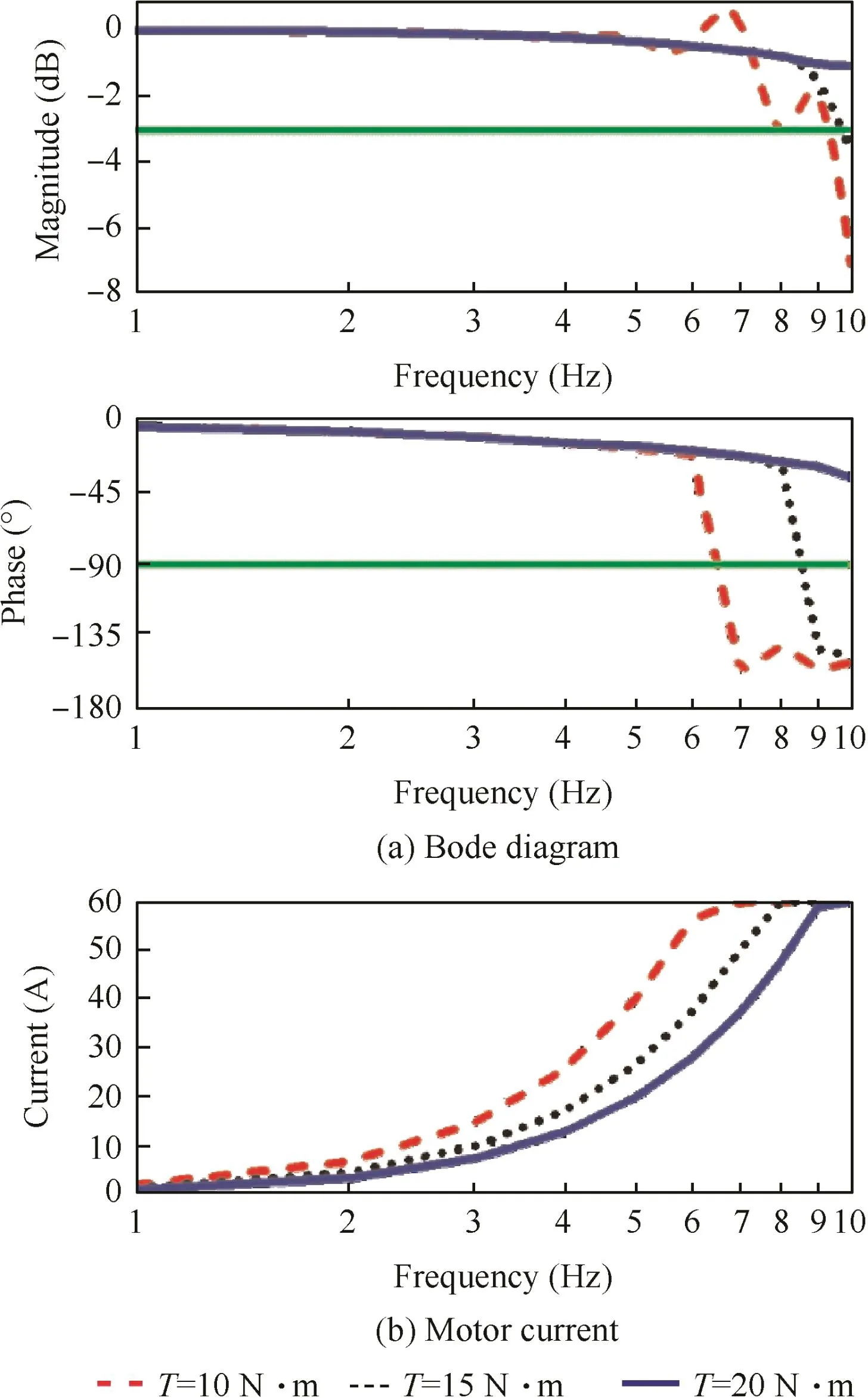
Fig.5Simulation results of optimized of maximum torque.
Remark 4.The load characteristics of the EHA system can be improved by increasing the maximum output torque of the motor,reducing the rotational inertia of the motor-pump group,and adopting the double-motor-pump group configuration.At the same time,the dynamic characteristic will also be increased.
5.Experimental verification
5.1.Experimental setup configuration
In order to verify the main factor constraining the frequency characteristic of the EHA,different frequencies signals are tested on the EHA prototype in a laboratory,which is afixed-displacement pump variable-speed motor EHA(FPVM_EHA).The system parameters of the prototype are shown in Tables 1 and 2.The EHA system prototype and the control system are shown in Fig.8.
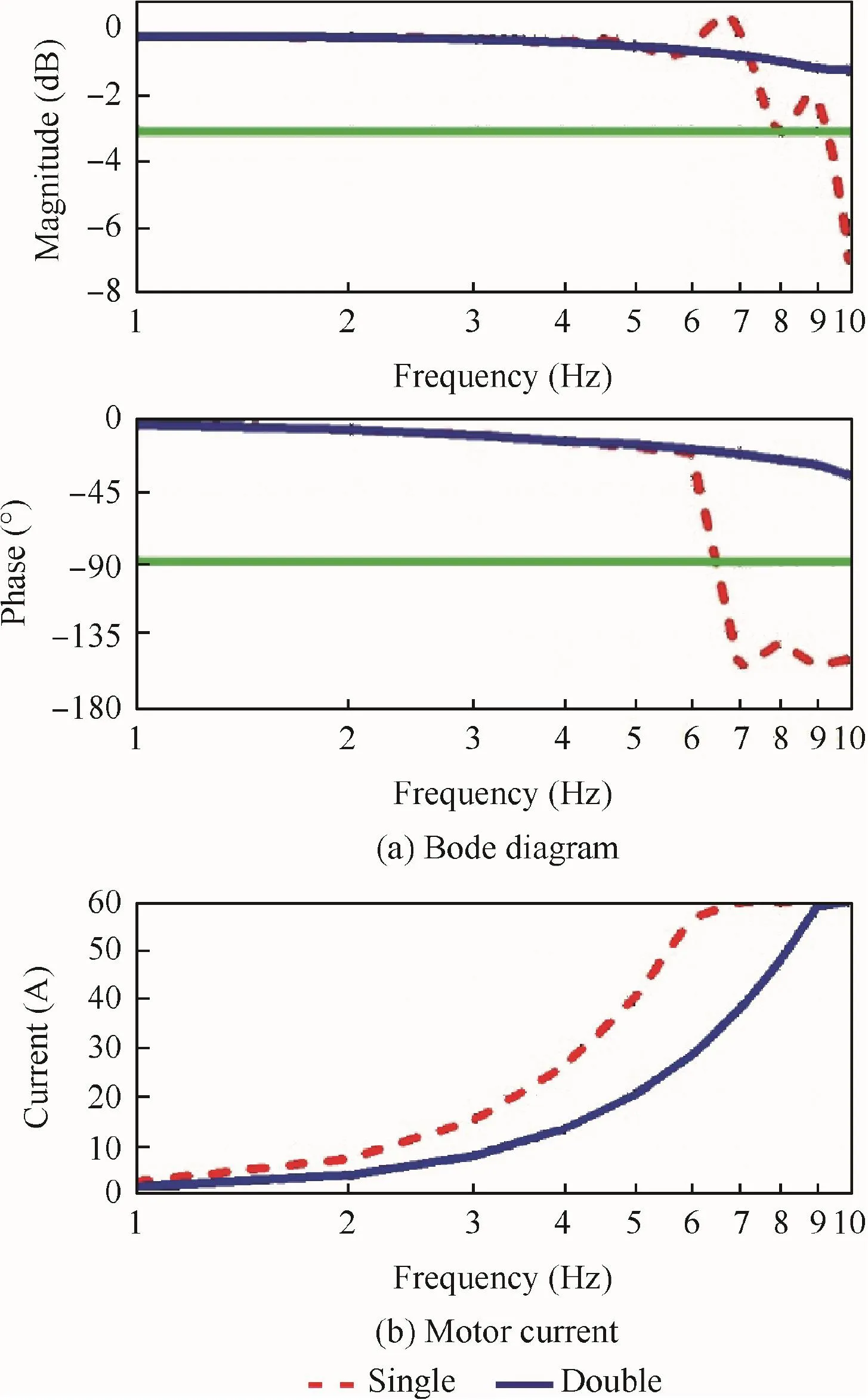
Fig.6Simulation results of double-motor-pump group.
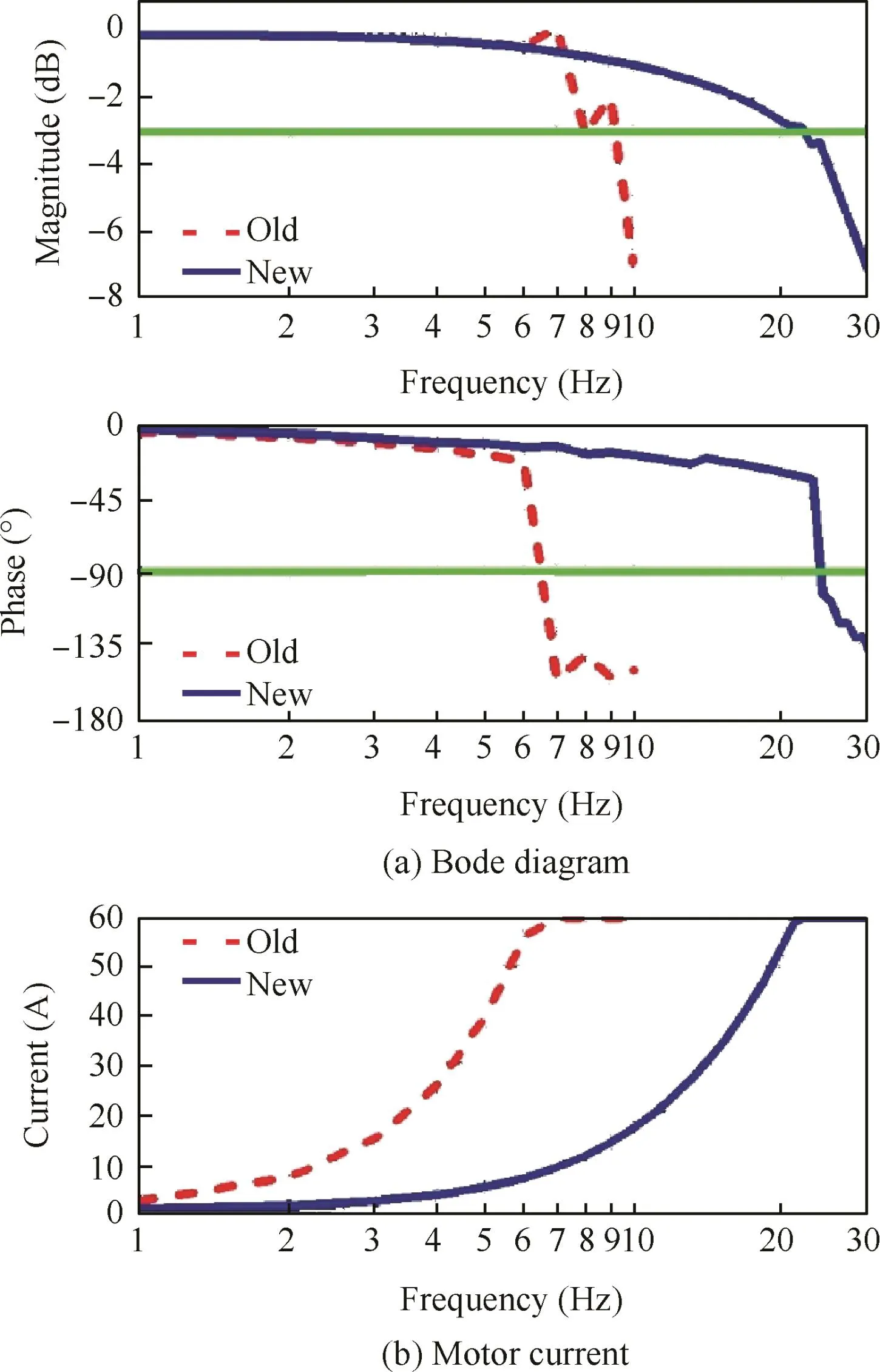
Fig.7Comparison results of integrated optimization.
The measurement and control system of the EHA consists of a test bench,the EHA,a spring load,a Kollmorgen driver,an EPS DC power supply,a PXI measurement system,an integrated circuit control box,a laptop,and other equipment(a thermal imager,a current clamp,and so on).The spring load consists of four springs with a spring stiffness of 443.5 N/mm,and the compressive elastic load generated by displacements in both the positive and negative directions is achieved by a designed special mechanical mechanism.The EPS DC power supply provides a voltage of 270 V and a power of 8 kW to the Kollmorgen driver.The speed of the brushless DC motor is controlled by the Kollmorgen driver using dual closedloop control which includes a current loop and a speed loop.The PXI measurement system contains a PXI1082 controller card,a PXI6733 input card,and a PXI6281 output card,wherein the PXI6281 is used to acquire the LVDT position sample of the EHA system,the outlet and inlet pressures of the pressure-following valve,the speed and current signals of the driver,the current and voltage signals of the power supply,and motor temperature signals.The computer control system is established by a structure of upper and lower machines.Theintegrated managementsubsystem written byLab Windows/CVI?software in the upper machine is used to implement the functions of system monitoring and parameters setting in the laptop.The real-time control system in the lower machine is compiled by LabVIEW?.Data transmission is achieved by the network communication between the upper and lower machines,and the set control period is 1 ms.
5.2.Frequencies tests of EHA
The EHA prototype is a typical position closed-loop control system in which the controller outputs a control signal to the driver,and then the driver controls the speed and direction of the motor based on the control signal,drives the hydraulic pump to rotate,controls the hydraulic pump’s output fiow and pressure,and drives the movement of the actuator.The position control command is set as 1.2 mm which is F.S.1.5%of the actuator,and the frequencies are set to be in the range from 1 Hz to 10 Hz.The control method combines traditional PID control with position command differential feedforward.Position command differential feedforward is used to compensate for the phase lag of the system.
Frequencies test results of the EHA system of which the bandwidth is 7 Hz are shown in Fig.9.As shown in Fig.10,when the test frequencies are higher than 7 Hz,the current of the motor saturates,the output torque of the motor cannot increase,and the speed of the motor continues decreasing when the testing frequency increases;therefore,the bandwidth of the EHA system is constrained.
5.3.Analysis restricting frequency characteristic
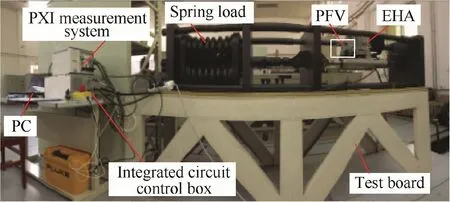
Fig.8Loading test bench of EHA.

Fig.9Bode diagram for EHA system.
Test results of the EHA system at 7 Hz are shown in Fig.11,in which the amplitude attenuation is?1.7289 dB,the phase lag is?89.2?,the peak current of the current loop of the motor driver is 60 A,and the maximum speed of the motor-pump group is 3000 r/min.When the EHA system moves at a 7 Hz sinusoidal signal,the current of the motor saturates,that is,the output torque of the motor reaches the critical value,and other system variables are within their design ranges.
Test results of the EHA system at 8 Hz are shown in Fig.12,in which the amplitude attenuation is?3.07 dB,the phase lag is?121.7?,the peak current is 60 A,and the maximum speed is 3500 r/min.When the EHA system is tested at an 8 Hz sinusoidal signal,the motor output maximum current is saturated,andthemotorspeedsignalisapproximatelyinatriangularwave state,which constrains the dynamic characteristic.
Three improvement measurements have been analyzed in this paper,among which increasing the output torque of the motor while reducing the rotational inertia of the motor are new and higher requirements for the motor design of the EHA,and a new motor is in progress;with respect to adopting lightweight and high-strength materials to reduce the pump’s rotational inertia,the structural force and friction characteristic need to be studied in-depth;regarding adopting the doublemotor-pump group configuration,currently there are no two motors and pumps which can implement a double-motorpump configuration in the laboratory.

Fig.11Test results for EHA system at 7 Hz.
Thereare certaindifficultiesinengineeringpracticetoimplementtheaboveimprovementmeasurements,soonlythesimulation results of those methods are presented in this paper,and an improved motor and hydraulic pump are in the design.Further experimental verification is the next main work.
6.Conclusions
(1)The natural frequency of each subsystem of an EHA is not the main reason restricting the dynamic characteristic of the system,and the main reason is the output power of the motor which restricts the dynamic characteristic of the EHA.
(2)Under the dynamic characteristic test condition,the maximum rotational speed of the motor-pump group has a linear relationship with the frequency,the maximum rotational inertia of the motor-pump group has a quadratic relationship with the frequency,and the maximum power requirement of the motor-pump group has a cubic relationship with the frequency.
(3)The main methods of improving the dynamic characteristic of the EHA system are increasing the maximum output torque,reducing the rotational inertia of the motor-pump group,and adopting a double-motorpump group configuration.

Fig.12Test results for EHA system at 8 Hz.
Acknowledgements
The authors would like to express their gratitude to the NationalNaturalScience Foundation ofChina(No.51475020)and the National Key Basic Research Program of China(No.2014CB046400).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Aeroservoelastic stability analysis for fiexible aircraft based on a nonlinear coupled dynamic model
- Experimental research on rotating detonation with liquid hypergolic propellants
- A model-scale test on noise from single-stream nozzle exhaust geometries in static conditions
- Investigation of straightforward impedance eduction method on single-degree-of-freedom acoustic liners
- Experimental characteristics of a two-electrode plasma synthetic jet actuator array in serial
- Aircraft robust multidisciplinary design optimization methodology based on fuzzy preference function