Multipath mitigation method based on Gaussian mixture model in RF relative measurement
2018-12-26WeiqingMURongkeLIUZijieWANGXinxinYANG
Weiqing MU,Rongke LIU,Zijie WANG,Xinxin YANG
School of Electronic and Information Engineering,Beihang University,Beijing 100191,China
KEYWORDS Dual-frequency ambiguity estimation;Gaussian mixture model;Multipath mitigation;RF relative measurement;Satellite navigation
AbstractRadio Frequency(RF)technology represents a high-precision relative navigation solution that has significant potential for application to earth-orbiting satellites.In precision applications,multipath errors dominate the total error because observables,which are used to estimate carrier-phase integer ambiguity,are not always subject to a Gaussian distribution when dualfrequency ambiguity estimation methods are used in the presence of multipath.As it has been shown that ranging observables obey a Gaussian mixture distribution,this study proposes improvements to the accuracy of estimation based on multipath mitigation founded on the Gaussian mixture model.To this end,such a model is created for integer ambiguity resolution in the presence of multipath,using which the theoretical error in dual-frequency ambiguity estimation is derived.Expectation Maximization(EM),which aids dual-frequency ambiguity estimation,is subsequently proposed to reduce the effect of multipath errors.Finally,two experimental scenarios are implemented to test the performance of the proposed method.The results show that EM-aided dualfrequency ambiguity estimation reduces the range error to approximately 20%in comparison with simple dual-frequency ambiguity estimation.Therefore the proposed technique is effective for multipath mitigation in RF relative measurement.
1.Introduction
A distinctive implementation of a Distributed Space System(DSS)is known as satellite formation fiying.Formation fiying has lately garnered significant research interest in aerospace applications.In satellite formation fiying,complex and expensive conventional satellites are replaced with multiple,smaller ones that can carry out the same functions at lower cost.1RF relative measurement represents a relative navigation solution that can be applied to earth-orbiting satellites,and using which their relative distance,position,and attitude can be measured accurately.This RF-based system inherits technologies associated with the Global Navigation Satellite System(GNSS)through the transmission and reception of the ranging codes and carrier phases via inter-satellite links.In the application of RF relative measurement,National Aeronautics and Space Administration has developed Autonomous Formation Flying(AFF)technology that has been employed in many missions(Star-Light/DS3/ST3).2Formation Flying Radio Frequency(FFRF)sensors are another instance of RF measurement based on the technology developed by the National Center for Space Studies for the PRISMA mission.3Recently,carrier-phase measurement has been used to attain high precision in RF relative meteorology.Compared with PRN(Pseudo-Random)code ranging,the carrier phase can provide higher measurement precision in RF relative meteorology but faces the integer ambiguity problem.Therefore,carrier phase ambiguity estimation is the major factor influencing precision.

Various Integer Ambiguity Resolution(IAR)methods have been developed to clarify ambiguities.For instance,the motion-based method is used to create geometrical variations to aid IAR,using which the time required for ambiguity initialization is of the order of seconds until the platform is properly moved.4This,this method is challenging to use in real time for measurement.
LAMBDA(Least-squares AMBiguity Decorrelation Adjustment)and LAMBDA-derived methods have been proposed for single-frequency measurement,and are based on integer least squares.5,6The LAMBDA method exploits the content of the full-ambiguity variance–covariance matrix,which in turn is influenced by satellite geometry.7For this reason,the probability of success of IAR decreases.
Dual-frequency ambiguity estimation was subsequently designed for use with a geometry-free model.Such estimation based on wide-lane observables was generated by two carrier phases at dual frequencies,whereas a quasi-carrier with a much longer wavelength can be introduced to improve the performance of IAR in RF-based systems.The dual frequency also represents the frequency division duplexing and Frequency Division Multiple Access(FDMA)network modes.8In this way,the quality of communication of the intersatellite link can be improved,and the networking mode becomes more diversified.
Many studies have used the dual-frequency IAR method and analyzed the theoretical error therein.9,10In this method,random noise in the non-ambiguous pseudo-range is subject to a Gaussian distribution,so that the method that averages multiple sets of observables is used to weaken measurement errors that influence the precision of carrier-phase IAR.
However,in measurements by formation satellites and the development of RF measurement sensors,multipath errors in RF relative measurements easily occur owing to the shading of the measured signals by the body of the satellite and the other objects in the test field.11,12Multipath errors can be regarded as a fault in the system.In many other sensor systems,there are methods for fault estimation and diagnosis.13,14However,the IAR of RF measurement for multipath mitigation is analyzed in this paper.Therefore,the conventional fault detection method is not suitable for this paper.In this paper,the ranging observables are as the research object.Multipath errors in the RF relative measurement affect the Gaussian distribution of measurement noise.15,16This study considers the output of the discriminator in the tracking loop as an example.It has been proved that the ranging observables influenced by multipath errors obey a Gaussian mixture distribution.In this paper,a Gaussian Mixture Model(GMM)is first proposed and theoretical carrier-phase IAR errors are derived based on it.Following this,EM-aided dual-frequency IAR is introduced to reduce multipath errors.Finally,the performance of the proposed model is assessed using numerical results.
2.GMM in dual-frequency ambiguity estimation
2.1.Dual-frequency ambiguity estimation method
An inter-satellite precision ranging model is shown in Fig.1.The dual-frequency ambiguity estimation method can be used to resolve carrier-phase integer ambiguity.The fundamental principle underlying thisisthe utilization ofa linear combination ofcarrier-fractionalphaseobservablesand pseudo-code phase observables to estimate carrier integer ambiguity.17
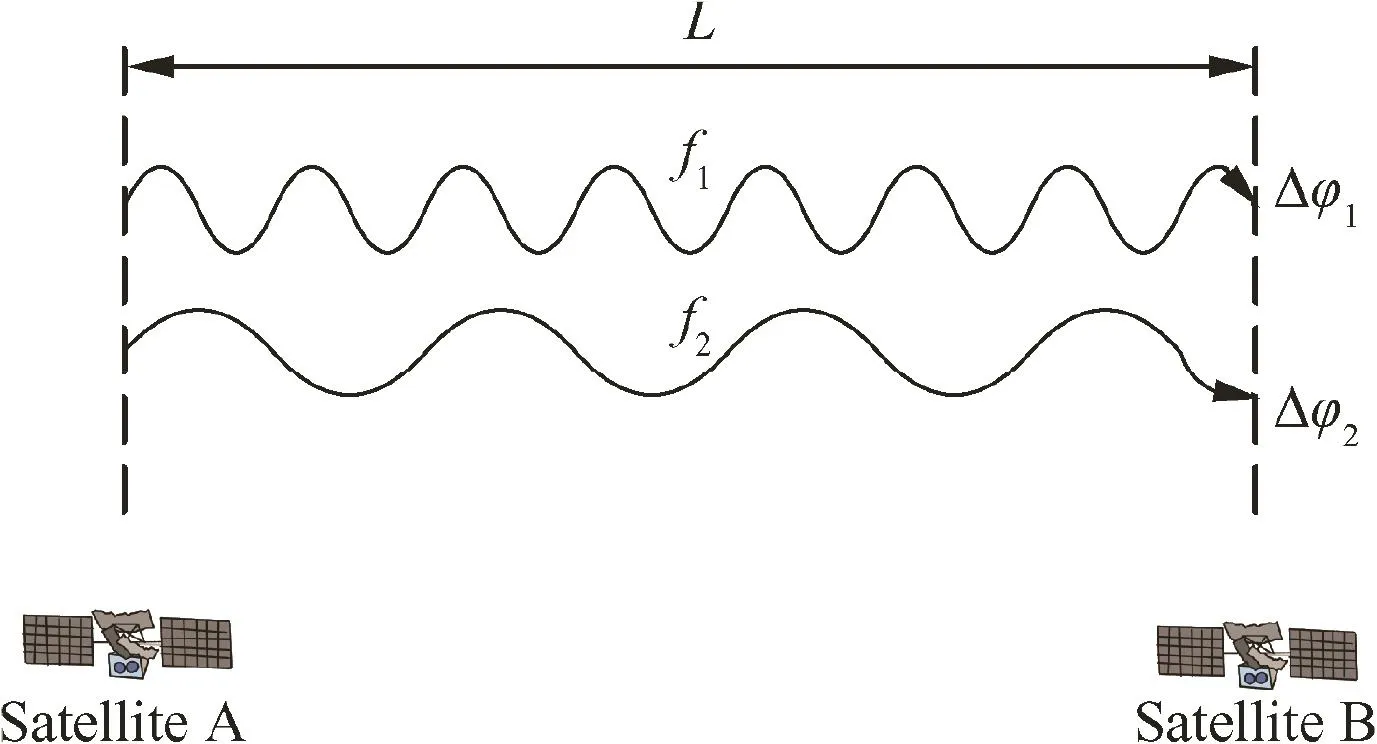
Fig.1Inter-satellite ranging model.
Assuming that the four observables obtained by Satellite B are,q1,and q2,the models for the pseudo-range observables can be given by

where q1and q2are the measured pseudo-range with two kinds of pseudo-code,respectively;andis the carrier phase calculated by pseudo-code observables q1and q2,respectively;L is the inter-satellite geometric range,Dt is the clock offset between Satellites A and B,c is the speed of light in a vacuum,j is ionospheric delay coefficient,andandare the phase errors caused by ionospheric delays at frequencies f1and f2,respectively.
The mathematical models for carrier-phase observables can be given by

Errors in the ionospheric delay of the carrier and pseudocode phases have opposite signs but the same size;this,the following expressions are obtained by Eqs.(1)-(4).

The observables of the wide-and narrow-lane ambiguities are defined as follows,respectively:
where subscript d is the wide lane,and a is the narrow lane.
Wide-and narrow-lane ambiguities can be obtained as follows by using Eqs.(1)-(4)to eliminate the error in ionospheric delay:

As the precision of the observable of Ndis considerably higher than that of Naobservation precision,can be replaced by.The new narrow-lane ambiguity equation is as follows:

Therefore,wide-and narrow-lane ambiguity observables can be obtained in a single epoch.To improve the observation precision of wide-and narrow-lane ambiguities,the average of the successive observables of both can be calculated.According to wide-and narrow-lane ambiguities,the carrier-phase ambiguities of the two frequencies can be calculated as follows:

According to the above analysis,the method to estimate dual-frequency ambiguities is established for the Gaussian channel,whereas observable noise is not subject to a Gaussian distribution when the ranging signals are influenced by the multipath effect.Therefore,to find the distribution of observable noise,signals influenced by the multipath effect need to be analyzed in the tracking loop.
2.2.Gaussian mixture modeling
In the RF measurement system,following the usual signalflows in a digital architecture of the Intermediate Frequency(IF)receiver,the incoming signal composed of direct and reflected signals in the presence of the multipath effect can be expressed as:15,18

where A is signal amplitude,is the PRN code,akis the reflection coefficient(where a0corresponds to the direct signal,and is equal to one),xcis the frequency of the incoming signal(rad/s),is the phase of the direct signal or the kth reflected signal(rad),and skis the time delay between the direct and the kth reflected signal(s).
In the receiver,the incoming signal is mixed with the early and late versionsofthe Pseudo-Random-Noise(PRN)code modulated onto the frequency of the local oscillator.15,18The early and late versions of the PRN code modulated onto the frequency of the local oscillator can be expressed as:

where s is the tracking error in the Delay-Lock Loop(DLL),sdis the time advance of the early code or time delay in the late code,x0is the frequency of the local oscillator,and b0is the phase of the local oscillator.
The in-phase correlation results of the late branch are:

Similarly,the results of the in-phase correlation of the early branches can be,respectively,expressed as:

In this paper,the discriminator of the DLL is defined as:

The task of the DLL is to maintain the discriminator outputs zero.In the presence of multipath,the value of s that fulfi lsis no longer zero,indicating that the DLL is no more tracking the direct signal but the compound of the direct and multipath signals.For this reason,it is clear that the central stable tracking point of discriminator is no longer(0,0),leading to a remaining tracking bias due to the multipath effect.Multipath error is then computed measuring the bias between the point at(0;0)and the point of the real zero-crossing of the discriminator function.
In addition,this code multipath error is simply that the value of s meets.So the code multipath error can be derived as follows.18
For more obvious show,the phase curve is draw in the absence of multipath,i.e.,andin Eqs.(15)-(20),the code phase-discrimination curve of the DLL is represented by the red dotted line in Fig.2(a).In addition,in the presence of multipath when,,and,the code phase-discrimination curve of DLL is shown as the solid blue line in Fig.2(a).It can be found from the two curves that the code phase generated by DLL exist a stable offset in the presence of multipath,compared to that of absence of multipath.
Furthermore,it can be concluded from Eq.(21)that the magnitude and sign of code multipath offset are not only related to the amplitude and code-phase of the multipath signal,but to the phase difference between the multipath signal carrier and the local carrier.Moreover,the envelope of code multipath error is considered as the upper and lower bounds of the multipath code offset whenis equal to 0?and 180?,respectively,and.Therefore,the envelope of the code multipath error can be obtained from Eq.(21)and shown in Fig.2(b).Therefore,by comparing the envelope of the code multipath error,the same conclusion is drawn that the code phase generated by DLL exists a stable multipath offset in the present of multipath,compared with that of absence of multipath.
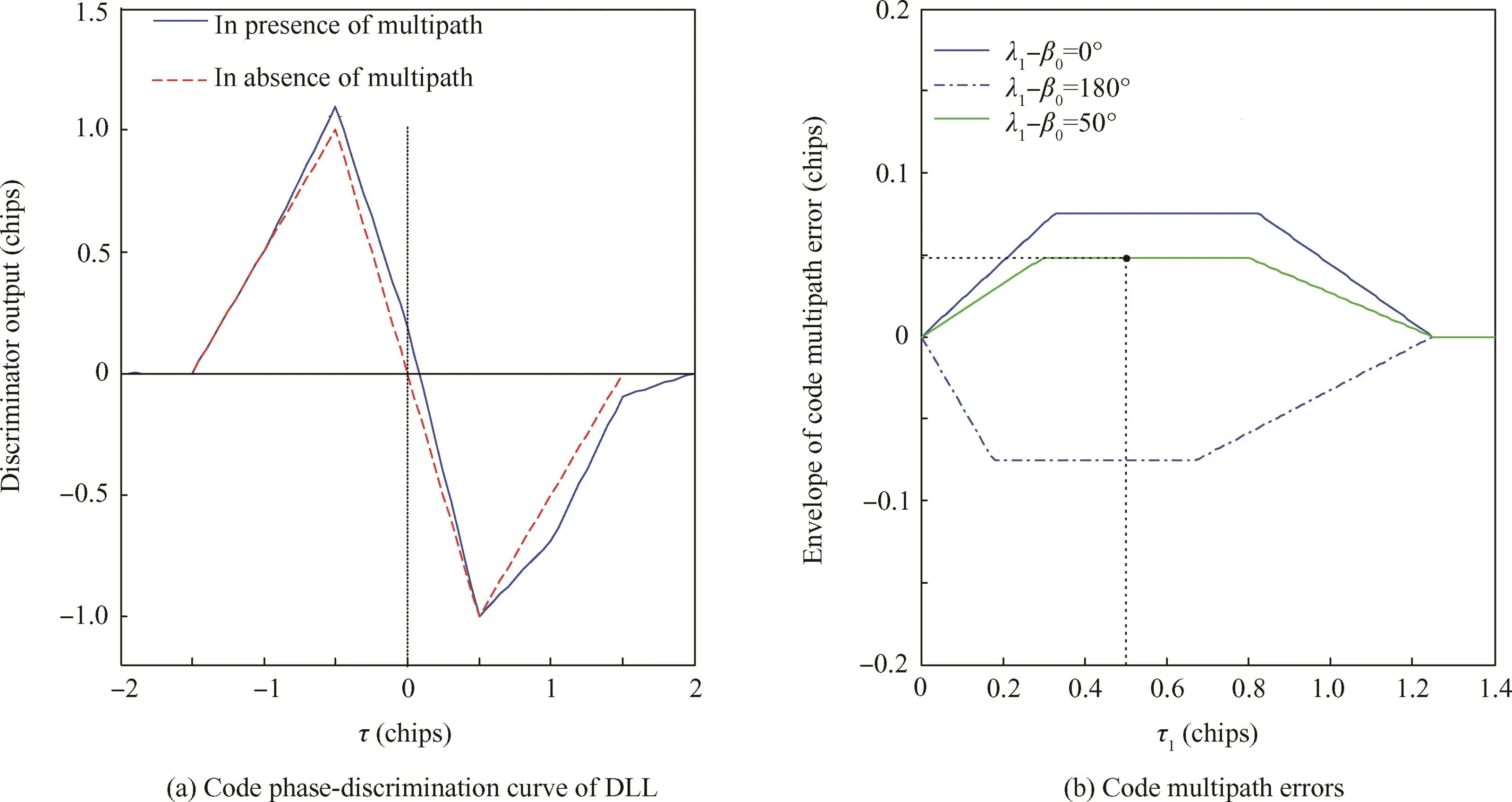
Fig.2Phase curve of discriminator and envelope of code multipath error.
It is worth noting that even in the absence of the multipath,the code-phase tracking errors produced by the code phases owing to thermal noise,which are modeled as noise that obeys a Gaussian distribution with zero mean.18In addition,in the presence of the multipath,it is known from the analysis that the observed values of the DLL in the locked state include a stable phase offset,which is the only difference from the case of absent of multipath.The observed error also depends on the thermal noise.Therefore,the model of observed errors is also regarded as a Gaussian distribution,only the mean is non-zero.The occurrence of multipath during the docking of the ISS and Soyuz spacecraft is consistent with this conclusion.13Since the pseudo-range is calculated by code-phase observables,the observables of q1and q2obey a Gaussian distribution with non-zero mean.As with q1and q2,the carrierphase observablesandgenerated by PLL have the same characteristics of distribution.16,18
Assuming that N observables of q1,q2,D/1and D/2are stored for resolving carrier-phase integer ambiguity.Moreover,the first M epochs in the N epochs occur in the absence of multipath error,the M observables of q1,q2,D/1and D/2in M epochs obey a Gaussian distribution,respectively.The remaining N–M epochs occur with multipath;thus,the observables of q1,q2,,andin these epochs obey a Gaussian distribution with non-zero mean,and each observable is independent.The N observables are obtained as shown in Fig.3.
The N observables of q1,q2,,andin all N epochs obey a Gaussian mixture distribution,which is deduced as follows.As for q1,the M observables obey a Gaussian distribution with mean ofand variance of(whereis the standard deviation of the code-phase tracking error,andis length of the pseudo-code)in the first M epochs(OM).In the remaining N–M epochs(ON?M),the N–M observables of q1obey the Gaussian distribution with mean ofand variance of.Therefore,the Probability Density Functions(PDF)of the two independent distributions are:
where q1;nis the pseudo-range observable obtained in the nth epoch,andare the PDF of q1in the first M epochs and the remaining N–M epochs,respectively.
Firstly,the Cumulative Distribution Function(CDF)for the stored N observations are computedbased on the law of total probability.

where X stands for the observable of q1;n.
Then,the PDF of ONis calculated as follows:

Therefore,according to the definition of the GMM,19the N observables of q1are subjected to the GMM.
3.EM-aided dual-frequency ambiguity estimation method
3.1.Error analysis of dual-frequency ambiguity estimation based on GMM
Based on the GMM,the theoretical error of dual-frequency ambiguity estimation method is deduced to verify the reliability of the proposed method.In the presence of multipath in the last N–M epochs,the PRN code phase observables Du1and Du2,and the carrier-phase observables D/1and D/2obtained over the N epochs obey a Gaussian mixture distribution.According to its definition,the mean and standard deviation of PRN code-phase observables Du1and Du2generated by DLL can be expressed,respectively,as:

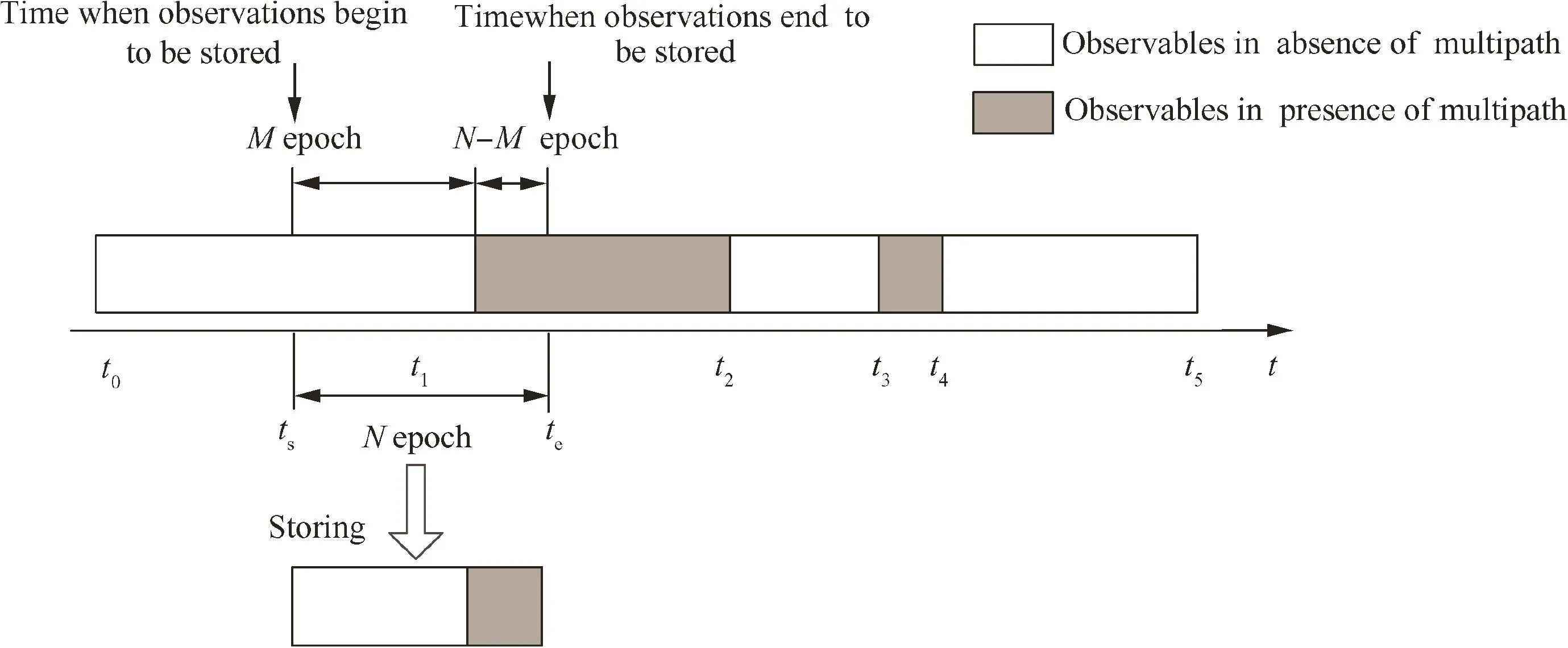
Fig.3The process of obtaining observables.

As the PRN code-phase observables ofand,the mean and standard deviation of the carrier-phase observablesandgenerated by the PLL can be expressed as:


Based on Eqs.(1)and(2),the mean and standard deviation of U1and U2can be obtained as:

By Eq.(9),the mean and standard deviation of wide-lane ambiguity are,respectively,
In dual-frequency ambiguity estimation,N observables of Ndcalculated by N epochs are averaged to reduce the effects of noise.Ultimately,the standard deviation of Ndis given by

Based on the GMM,the carrier-phase integer ambiguity obtained by the existing the dual-frequency ambiguity estimation method contains large multipath errors.Therefore,this paper proposes an EM-aided dual-frequency ambiguity estimation method based on the GMM to improve the precision of carrier-phase ambiguity resolution in the presence of multipath errors.
3.2.EM-aided dual-frequency ambiguity estimation method
To estimate the parameters of the GMM,an EM-aided algorithm is used to fit the distribution.The observables containing multipath errors can thus be removed.Therefore,the residues of observables are used for IAR.In the presence of multipath errors,the carrier integer ambiguities obtained by the EM-aided algorithm are considerably more precise than those obtained by the original dual-frequency ambiguity estimation method.
The core of the EM-aided algorithm is to utilize the EM algorithm,which consists of an E-step and an M-tep,20to estimate the parameters of the distribution of observables of q1,q2,D/1,and D/2.For instance,utilizing the EM algorithm to estimate the parameters of GMM of observable of q1.The likelihood function used in the EM algorithm can be expressed as

where Lq1(?) is the likelihood function used in the EM to estimate the parameters of GMM ofobservableq1,andis the set of parameters of observable q1in the GMM.
The nth iteration step using the EM algorithm to estimate the distribution parameters of observable q1are as follows20:
3.2.1.E-step(Expectation step)
We use the new observable q1;nand the estimated parameters of the GMM obtained from the previous iteration to calculate the prior probability that q1;nbelongs to the mth-order Gaussian distribution.As observable q1obeys the second Gaussian mixture distribution in this paper,the E-step can be expressed as

3.2.2.M-step(Maximization step)
The E-step and M-step are repeated until the final results of the parameter estimation are obtained.All steps of the EM-aided dual-frequency ambiguity estimation algorithm are as shown in Table 1.
Using the algorithms proposed in this paper,it is possible to obtain high-precision estimations of the pseudo-range and the carrier-fractional phase in the presence of multipath errors.Then,carrier-phase integer ambiguities can be calculated using these estimations.Therefore,the proposed algorithm effectively reduces the effects of multipath on the precision of inter-satellite ranging.

Table 1Implementation of the EM-aided dual-frequency ambiguity estimation method.
4.Experiments and results
4.1.Test of EM-aided dual-frequency ambiguity estimation
To verify the performance of the EM-aided dual-frequency ambiguity estimation method proposed above,a simulation experiment was designed consisting of two experimental scenarios.
In Scenario 1,to verify the fitting performance of the proposed estimation method,this study varied the number of epochs used from 10 to 300.Moreover,to verify the realtime performance of the proposed estimation method,we thus designed Scenario 2.In Scenario 2,the basic experimental conditions were nearly identical to those in Scenario 1,except that the number of epochs was altered to 20.And the Monte Carlo simulations were repeated 1000 times to compare the performance of the two algorithms.Details of the two experimental scenarios are listed in Table 2.
4.2.Results of Scenario 1
Fig.4 shows the fitting results of experimental Scenario 1.The following was observed:
(1)With an increase in the number of epochs,the fitting results of the output phase of the DLL gradually approached the real distribution.
(2)With increasing number of epochs,the mean value of the fitting results of the DLL phase became increasingly similar to the theoretical mean value.

Table 2Experiment scenarios.

Fig.4Fitting results using different numbers of epochs.
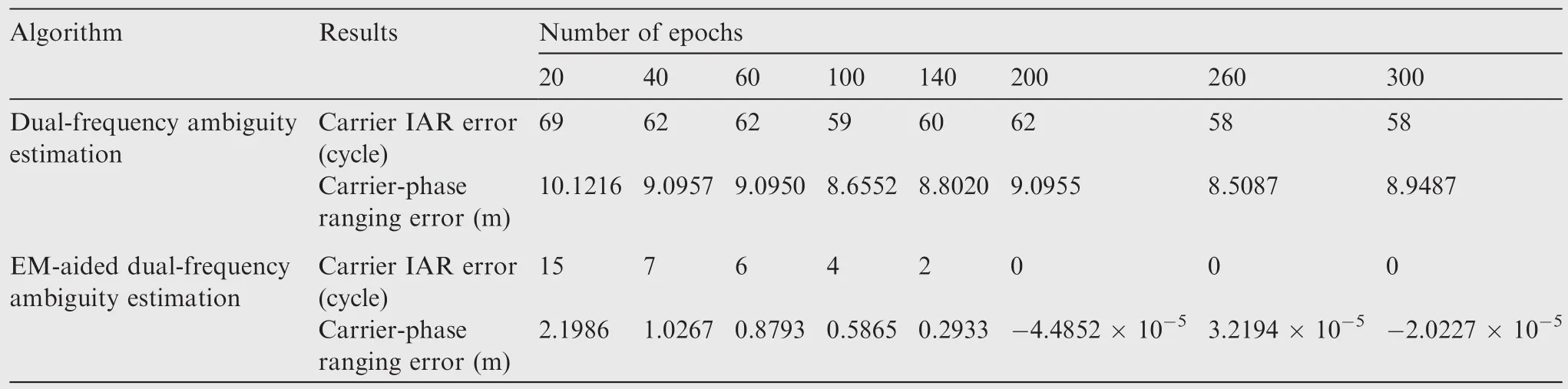
Table 3Results of IAR using different numbers of epochs.
(3)When the number of the epochs used for fitting was close to 300,the fitting value of the DLL phase was equal to the theoretical value in the absence of multipath.This means that the fitting results became more and more accurate with the fit.
The experimental results of Scenario 1 are given in Table 3 and Fig.5.From them,the following should be noted:
(1)Compared with the dual-frequency ambiguity estimation method,the EM-aided method provided better performance in terms of IAR.
(2)With increasing number of the epochs,the errors in the carrier IAR decreased.
(3)The ranging errors of the proposed approach were lower than those of dual-frequency ambiguity estimation with different numbers of epochs.
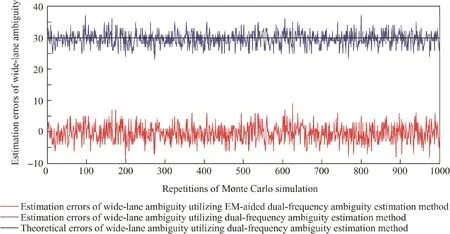
Fig.5IAR precision with 20 epochs using different methods.
4.3.Results of Scenario 2
From Section 4.2,it is evident that IAR precision using the EM-aided dual-frequency ambiguity estimation method is higherthan thatobtained through the originaldualfrequency ambiguity estimation.To satisfy the dynamic requirements of the higher-resolution scene,20 epochs were used to verify the performance of the EM-aided dualfrequency ambiguity estimation method.
Fig.5 show the results of Scenario 2,from which the following is evident:
(1)Theestimation ofcarrier-phaseintegerambiguity obtained using EM-aided dual-frequency ambiguity estimation was lower than the theoretical value based on GMM.
(2)After eliminating the observations affected by multipath by the EM-aided method.Through conversion,the ranging error was reduced to approximately 20%compared with that of dual-frequency ambiguity estimation.
5.Conclusions
(1)In this study,the Gaussian mixture model for IAR was proposed for RF measurement in the presence of multipath.Based on this model,the theoretical error of dual-frequency ambiguity estimation in the presence of multipath was obtained.
(2)EM-aided dual-frequency ambiguity estimation was proposed,based on which IAR precision was improved.Compared with the original dual-frequency ambiguity estimation,the range error utilizing EM-aided dualfrequency ambiguity estimation was reduced to approximately 20%in the presence of multipath,and the results were in agreement with experimental data.
(3)In future work,we intend to focus on reducing the number of epochs required for estimation to improve performance.
Acknowledgements
This work was supported by the National Natural Science Foundation of China(No.91438116),the Program for New Century Excellent Talents of China(No.NCET-12-0030).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Aeroservoelastic stability analysis for fiexible aircraft based on a nonlinear coupled dynamic model
- Experimental research on rotating detonation with liquid hypergolic propellants
- A model-scale test on noise from single-stream nozzle exhaust geometries in static conditions
- Investigation of straightforward impedance eduction method on single-degree-of-freedom acoustic liners
- Experimental characteristics of a two-electrode plasma synthetic jet actuator array in serial
- Aircraft robust multidisciplinary design optimization methodology based on fuzzy preference function