基于模糊神经网络的智能交通信号控制设计
2018-12-24
(西安航空职业技术学院 电子工程学院,西安 710000)
0 引言
近年来,随着国民经济水平的提升,城市的交通压力与日俱增。在此背景下,交通信号控制成为缓解城市交通状况的主要方式。而在城市交通压力中,主干道是承担压力的主要位置,该位置交通情况的好坏将直接决定着整个城市交通的顺畅与否。因此,对主干道交通信号控制的研究,是解决城市交通拥堵,提高城市同行能力的关键所在。对此,本文将神经网络理论的模糊控制引入到主干道的交通信号控制研究中,并围绕此理论提出可行的控制方法和策略,以此期望为交通控制领域提供参考。
1 模糊控制原理
模糊控制系统的核心部位在于模糊控制器,而模糊控制器主要由输入量的模糊化、模糊推理以及去模糊所组成。具体模糊控制原理,如图1所示。
根据上图可知,模糊控制系统主要由模糊控制器、A/D及D/A转换、执行机构、被控对象以及传感器构成。模糊控制系统在进行控制工作时,并不会对被控对象实际模型有着任何要求,能够应用于被控对象模型无法掌握的情况之下。
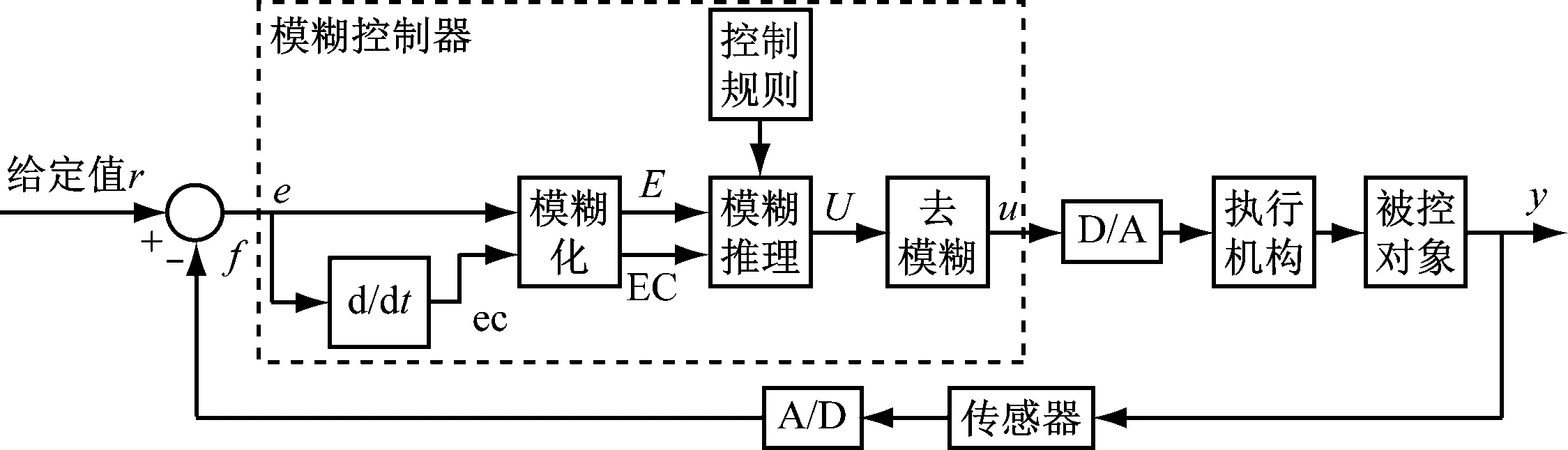
图1 模糊控制原理
城市主干道车辆交通信号控制本身就是一项极具复杂性、随机性等特点的系统,传统控制方法无法适用于主干道的交通控制系统当中。而模糊控制具备对被控对象模型无要求的这一特点,完全与城市主干道交通信号控制的复杂特点所契合。但由于模糊控制系统自身缺乏主动学习及适应能力,在后续交通信号控制过程中将逐步暴露出许多隐形问题。
2 模糊控制与神经网络模型构建
据目前情况来看,相关领域中将神经网络和模糊控制相结合的方式主要有两种,分别为模糊神经网络以及神经模糊系统。其中模糊神经网络主要是以模糊逻辑理论作为基础,利用神经网络技术的自组织性特点,将模糊逻辑理论与神经网络技术相结合,以此进行信息处理。模糊神经网络是一种神经网络的模糊化,但其主体为模糊控制;神经模糊系统主要以神经网络为基础,利用模糊集合理论进行相关处理研究。具体神经网络模型构建,如图3所示。
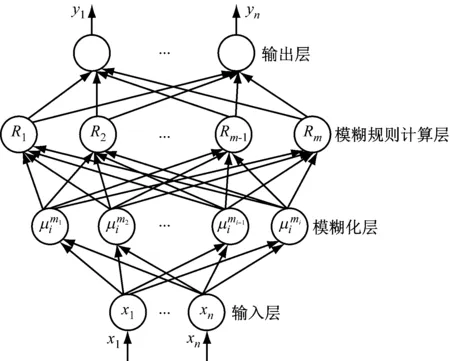
图3 模糊神经网络模型
根据上图所示,本文主要采用基于神经网络的模糊控制,来实现对模糊逻辑推理。同时,在模糊化及去模糊等功能方面,主要通过三角函数、高斯函数、模糊乘法、模糊加权法等进行实现。在模糊控制系统具有缺乏主动学习及适应能力这一重大缺陷方面,笔者认为可利用神经网络的学习算法,对网络参数自主学习及记忆能力进行修正,从而提高模糊控制系统的自主学习及适应能力。
3 基于模糊神经网络的交通信号控制及仿真
3.1 交叉口相位控制建模
本文将选择四相位单交叉口模型作为研究对象,采用四相位控制方法对通行方向进行控制。具体的相位控制时序图,如图4所示。
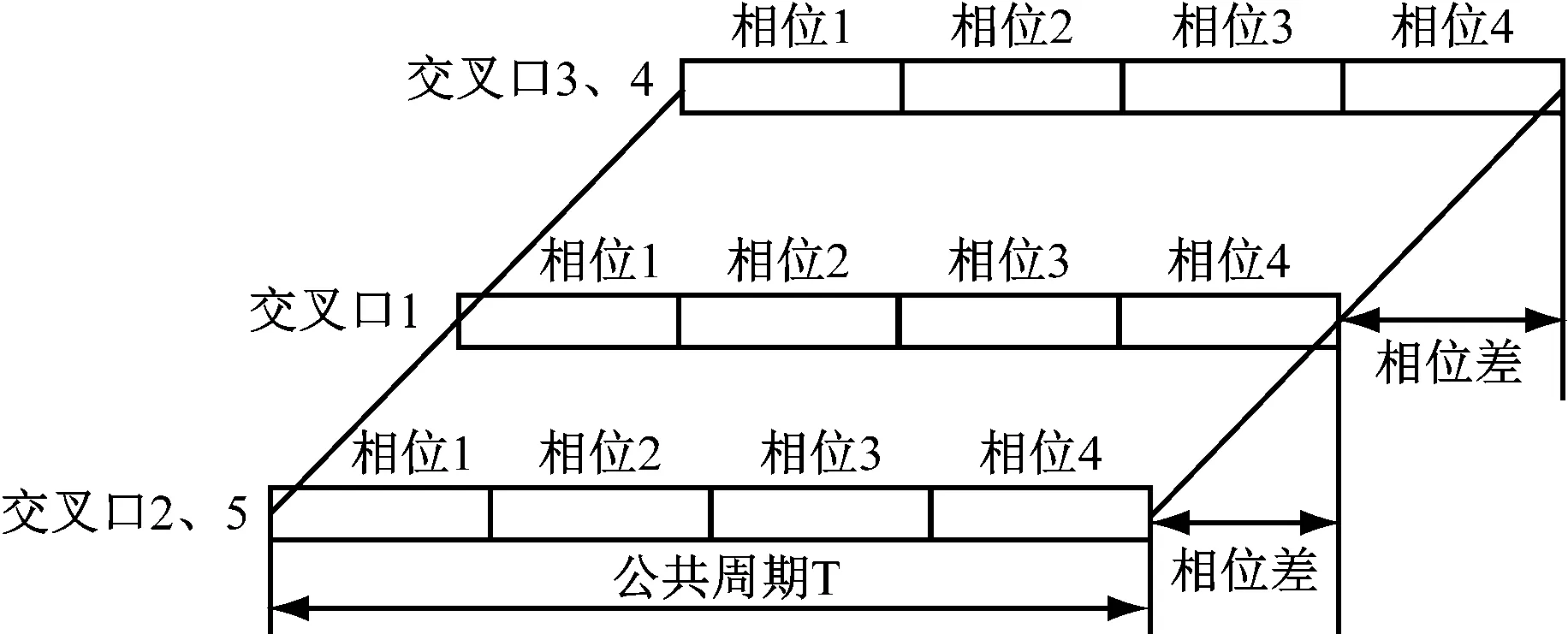
图4 相位时序控制图
为了使交通信号控制器实时掌握到车流情况,本文采用安装车辆检测器的方式,对交叉口车流数据进行采集。同时,在进行车辆检测器的过程中,为了检测到车辆离开与进入主干道的不同信息,本文将车辆检测器分为前端检测器以及后端检测器两种。其中前端检测器主要负责检测交叉口离开车辆信息;而后端检测器则主要检测进入该路段的车辆信息。通过上述传感器对车辆信息的采集,以此为交通信号协调控制提供依据。
3.2 评价指标设计
为了提高交叉口的通行能力,还需尽量减少每一信号周期内车辆的延误。对此,本文将选用降低周期内车辆平均延误作为评价指标,以此构建起主干道交叉口车辆延误模型。
假设城市交叉口道路中的车辆均为随机到达,若车辆到达率普遍较低,那么该信号周期内车辆到达情况将服从泊松分布;反之,则服从二项分布。当某相位开发绿灯之后,车辆驶离率为1 pcu/s。
将i=1,2,…,n看作是多个相位,j代表着车流方向,方向总量为m个方向。将qj代表一个信号周期内,交叉口第j个方向的车辆到达率,ti代表着第i相位的绿灯配时,则第i相位第j方向的到达车辆数为qjti。
假设第i相位第j个方向的车辆延误为dj,则为式(1)。
(1)
在该公式中,lj,i-1代表的是相位i的初始排队车辆;uij代表着第i个相位在第j方向上的车辆驶离率。
根据上述公式,可得出一个信号周期内车辆延误计算,为式(2)。
(2)
当某一信号周期开始时,车辆总长度,为式(3)。
(3)
总的车辆延误时间d则为式(4)。
(4)
3.3 控制器设计

3.4 模糊规则设计
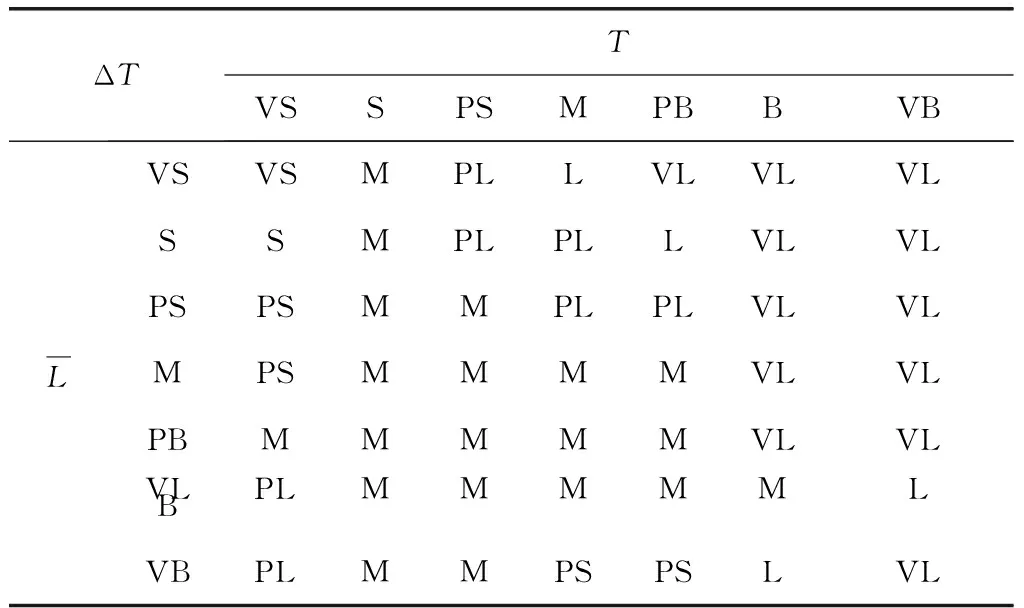
表1 模糊规则设计
根据表1的模糊规则表可以看出,该表总共表示49个规则,并且每一个规则对应一个模糊对应关系。
ΔT=(L0×T0)°R
(5)

3.5 仿真具体流程设计
根据上述的分析,将整体的仿真流程,如图5所示。
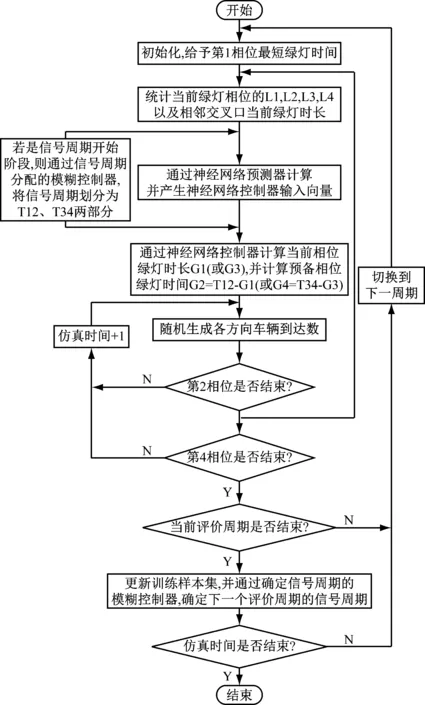
图5 算法设计
4 仿真验证
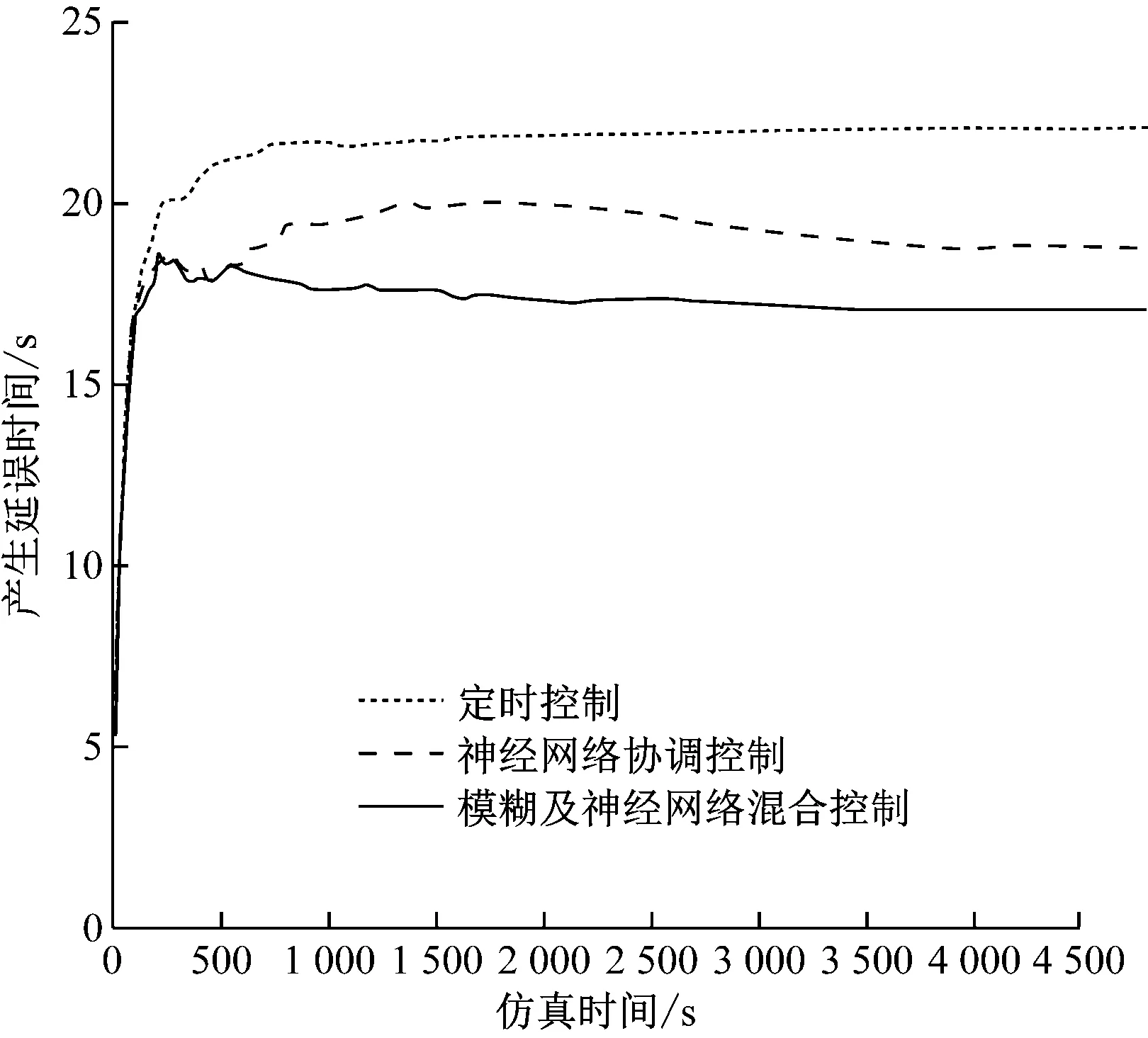
图6 交通流时车辆延误曲线对比
通过上述的比较看出,本文设计的模糊控制算法在平均延误时间方面,要明显优于传统的算法,说明本文算法的有效性。
5 总结
通过上述的研究看出,模糊控制在传统神经网络控制的基础上,对处理不确定性变量方面存在很大的优势。而通过这种模糊控制的方式,并结合神经网络的自学习功能,可实时根据采集到的车辆信息完成对车辆交通信号的智能化控制,减少车辆的平均延误时间,提高城市道路交通的效率。
