基于OS-ELM的位置指纹室内定位方案研究
2018-12-24周明,张其,王国梁
0 引言
随着无线网络和智能移动设备的普及,人们对基于位置服务的需求越来越迫切。众所周知,GPS等卫星系统在室外定位应用中,可以提供稳定、精确的定位服务,然而对于复杂的室内环境,如机场大厅、仓库、大型百货商场、图书馆、地下停车场,却很难发挥作用。不过众多短途无线传输技术,如Wi-Fi、RFID、Bluetooth、UWB等,仍为室内定位提供了更多可能和有力保障。其中Wi-Fi因广泛部署,成为首选方案。
室内定位的具体计算方案分别可采用位置指纹、三角定位等不同技术。位置指纹定位因定位精度高、扩展性强、易于实施等优点引起广泛关注,但基于位置指纹的传统方案大多存在两个主要问题:一是在离线阶段消耗较高的时间成本;二是在线阶段当环境存在干扰时,指纹库难以实时反映RSS值的变化,从而明显影响定位精度[1]。
在线顺序学习机(OS-ELM)由传统极限学习机演化而来[2],学习方式包括逐个学习和逐组学习两种,学习样本数量可以相同,也可不同。与其他顺序算法比较,OS-ELM在隐藏节点选取上适应性更强。例如SGBP (stochastic gradient descent back-propagation)和GAP-RBF(Growing and Pruning Radical Basis Function) 只能分别适应加性和RBF的隐藏节点[3][4],而OS-ELM则可以兼顾两种种类型的隐藏节点。另外,OS-ELM算法在参数的选取上只需确定隐含层节点数即可,可大大加快对网络的训练和调节。一般认为OE-ELM拥有更好的泛化性能和更快的学习速度[5]。
H. Zou等人提出的基于OS-ELM和位置指纹方法的定位方案[1],利用OS-ELM的在线顺序学习能力提高定位精度,思路新颖,具有相当的应用前景。但这个初步方案缺乏后续跟进,缺乏实测与优化讨论。本文在某地下车库环境中对该方案进行了实现、讨论与改进,特别包括:
1. 实现基于OS-ELM的位置指纹定位系统并讨论参数优化;
2. 对比了OS-ELM与经典ELM算法在室内定位算例中的表现;
3. 利用奇异值法去掉误差较大的测试值,有效提高定位精度;
4.分别在车辆较满和较少时,比较上述方案在定位误差上的表现。
1 相关的说明
1.1 OS-ELM算法原理
OS-ELM是一种流行的分类器,能够一个一个或者一组一组地在线处理数据,这是很多其他分类器都无法做到的。OS-ELM在一种基于单隐层前馈神经网络(SLFN)的训练算法ELM[6-9]基础上发展起来,其继承的SLFN包括输入层、隐藏层、输出层3个层次,如图1所示。
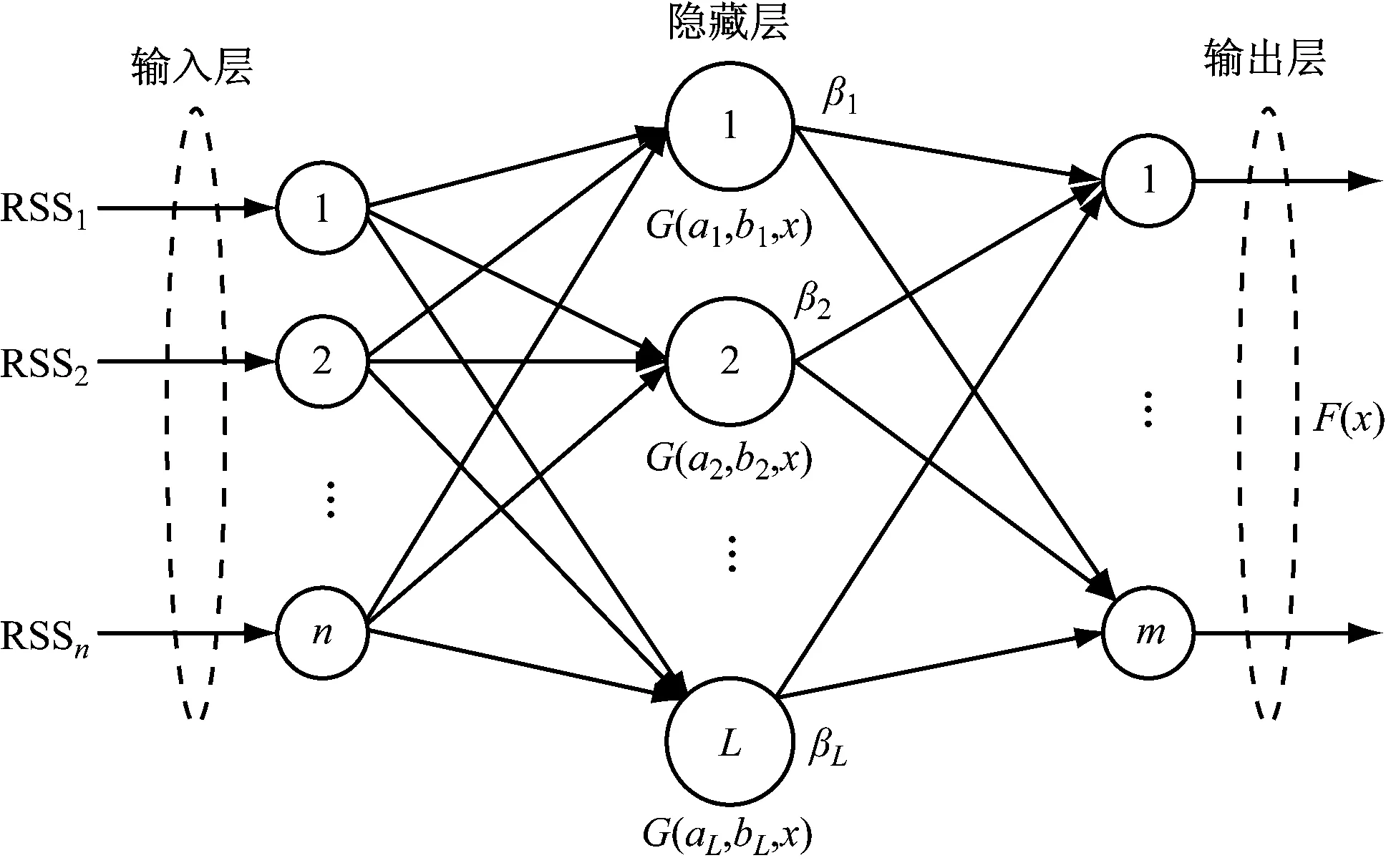
图1 SLFN结构框图
现假设有N个训练样本(xi,ti)∈Rn×Rm,如果存在一个具有L个隐藏层神经元的SLFN可以以零误差逼近这N个的数据样本,或者说,存在ai,bi和βi(i=1,…,L)使得式(1)。
(1)
其中ai,bi是连接第i个隐含层神经元结点与输入结点的权重和偏置值,它们可以随机生成;βi是连接输出结点与第i个隐含层神经元结点的输出权值,G(ai,bi,xj)为激励函数,给出第i个隐含层神经元结点的输入向量xj,获得一个隐含层输出值G(ai,bi,xj)。OS-ELM算法一般包括“初始化”和“顺序学习”两个过程。
1.2 位置指纹方法
由于无线信号在传播过程中会产生与传播环境相关但与物理位置无关的特征参数如接收信号强度(RSS),信噪比等等,我们将这些特征参数称为位置指纹(Location Fingerprint)。位置指纹定位技术的核心思想就是将来自各参考点(RP)的特征参数组合起来建立位置指纹数据库 ,并利用移动终端实际接收到的信号特征参数与数据库之前存储的位置指纹进行匹配,从而达到定位移动终端的目的。位置指纹方法包括离线和在线两个阶段[10-11],如图2所示。

图2 位置指纹定位过程
1.3 一种新颖的定位算法
文献[1]提出了一种将OS-ELM和位置指纹方法结合在一起的新颖定位方案,如图3所示。
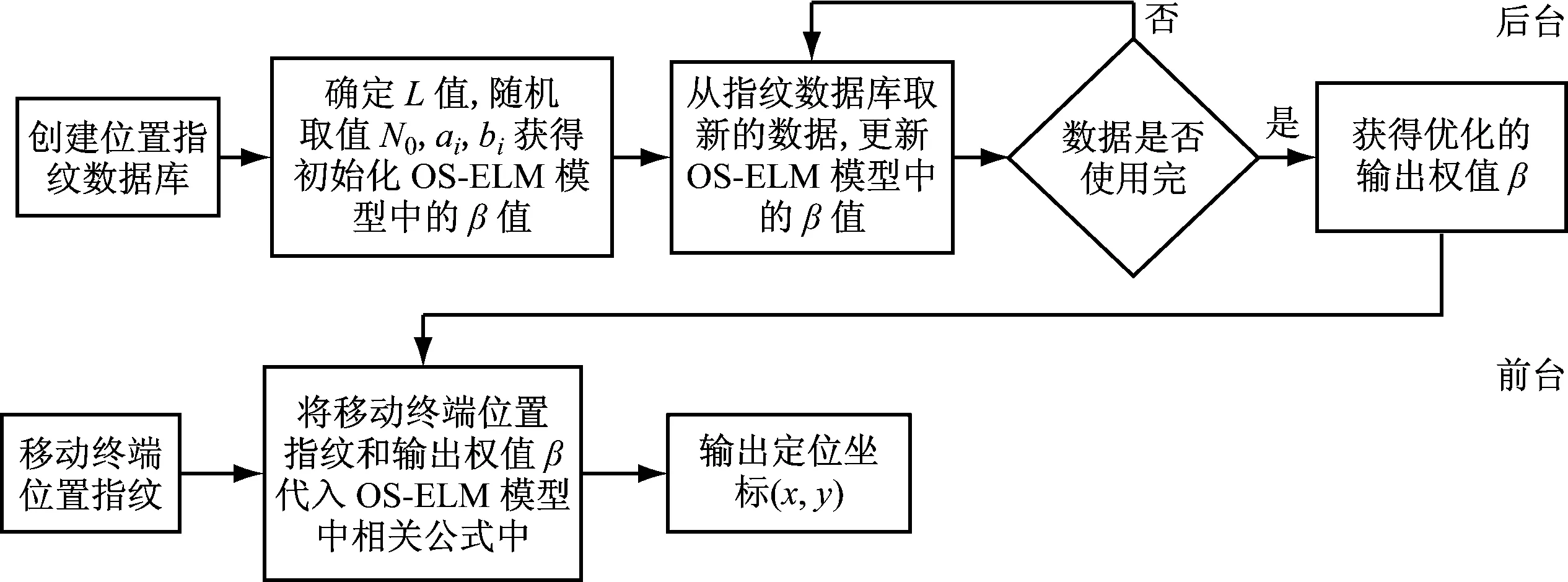
图3 改进定位算法
分为前台和后台两个部分:前台展示定位结果,后台是实时指纹数据在神经网络里的迭代更新过程,以避免当环境发生较大变化时,导致定位误差过大。后台又由两部分组成:第一,在OS-ELM初始化阶段,建立一个初始化的OS-ELM模型,因OS-ELM算法具有快速学习能力,所以对训练样本数量要求不高,在某种程度上减少了离线阶段的人力和时间成本;第二,利用OS-ELM在线顺序学习能力,选择成组学习样本,通过迭代学习,更新OS-ELM模型。因此整个方案可以看成三个部分: OS-ELM初始化,OS-ELM更新迭代和位置估计。
2 相关实验和实验结果
本实验采用TP-LINK TL-MR10U portable 3G 路由器作为AP节点。建立位置指纹数据库时,使用Atheros AR9285 Wireless Network Adapter #2来采集来自各个RP的RSS数据。实验场地选择某室内地下车库,长32.8m,宽16.6m。选择了20个初始阶段节点,10个顺序学习阶段节点,10个参考节点,9个AP节点。实验环境与部署信息,如图4所示。
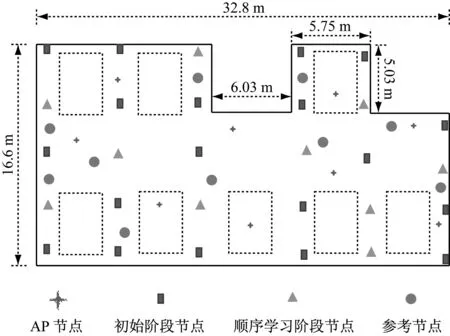
图4 车库中AP点,初始阶段节点,顺序阶段节点的位置分布
在初始化阶段,实验选用hardlim函数G(a,b,x)=hardlim(ax+b)作为激励函数,hardlim为属于加性激励函数,选择神经元隐藏层节点为6个。收集各个参考点的RSS值及其位置坐标建立位置指纹数据库,选择20个点作为OS-ELM模型初始阶段节点。选择10个点作为顺序学习阶段节点,不断更新顺序学习阶段节点,这里每次更新2个点,进而更新OS-ELM模型。选择10个参考节点来完成对实验的验证,每次取两个不同的参考点。参考点真实定位坐标为(x,y),估算坐标(x0,y0),则d表示定位误差:
(8)
实验结果如表1所示。
可以清晰地看出通过不断迭代OS-ELM网络,定位误差在缩小,最新结果达到了2.7955m,相较传统的bath ELM算法在定位精度上提高了约50%。其中定位误差结果取10次计算的平均值。另外计算输出权值β值时,平均消耗0.041 1 s。在初始化阶段,OS-ELM较传统bath ELM时间上节约了28%。
在实验过程中,我们发现,定位精度存在不稳定性,会出现比较大的误差值。将较大奇异值去掉后,所得定位误差参如表2所示。
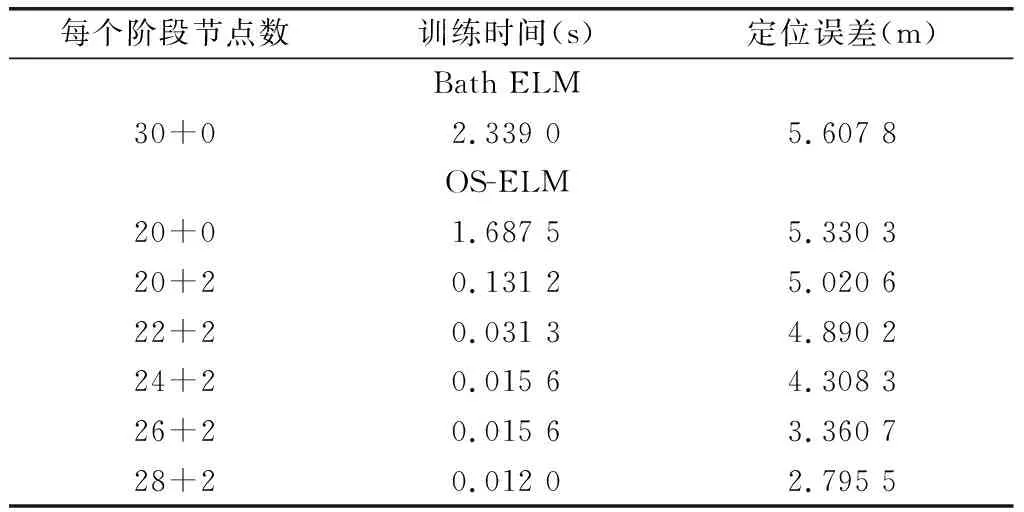
表1 OS-ELM和bath ELM算法比较
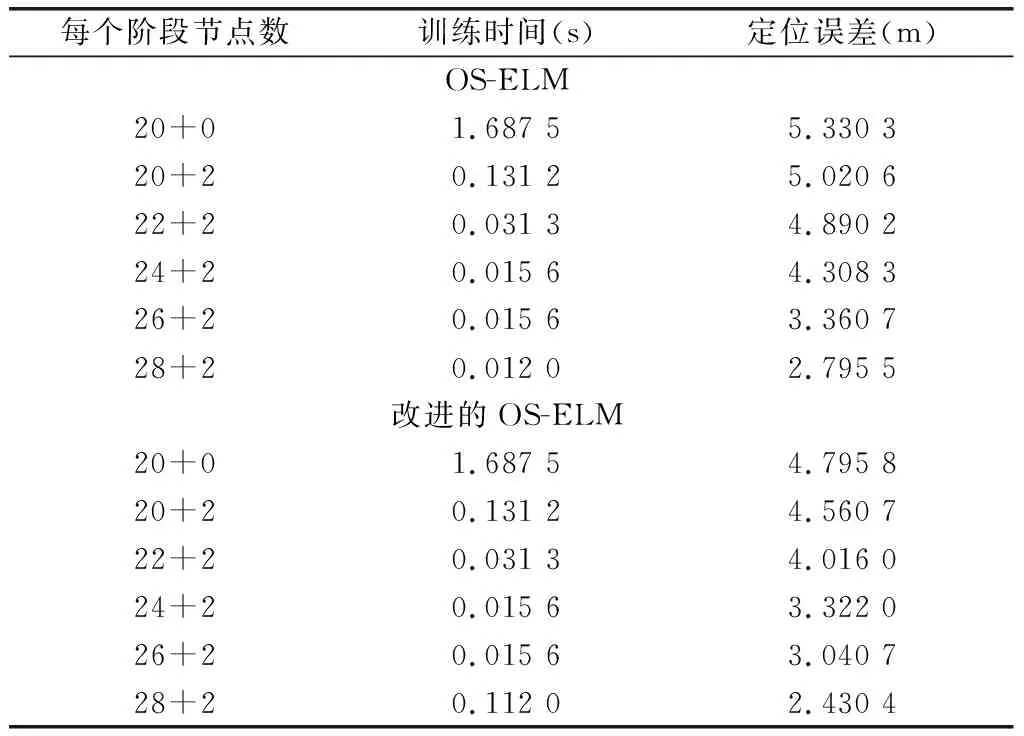
表2 改进的OS-ELM和bath ELM的比较
由表2可知,改进的OS-ELM算法通过去掉实验中误差大的奇异值,获得了比文献OS-ELM算法更优的定位误差。在最新更新的OS-ELM模型中,最优解可以达到2.4304m,较定位误差而言,改进的OS-ELM相比文献OS-ELM算法在定位精度上提高了约13%。
以表2中 “28+2”这一代数据为例示意了奇异值的存在,如图5所示。

图5 30组误差离散图
可以清楚地看到第17,20,25组的误差值明显偏大,去掉这些值将对实验结果产生正面影响,提高定位精度值。
为了验证环境对于此方案的影响,我们又进行了一组实验,在12.6 m×16.6 m的地下车库,对车位满和车位空两种场景进行定位误差的比较,10个位置点的定位误差对比曲线,如图6所示。
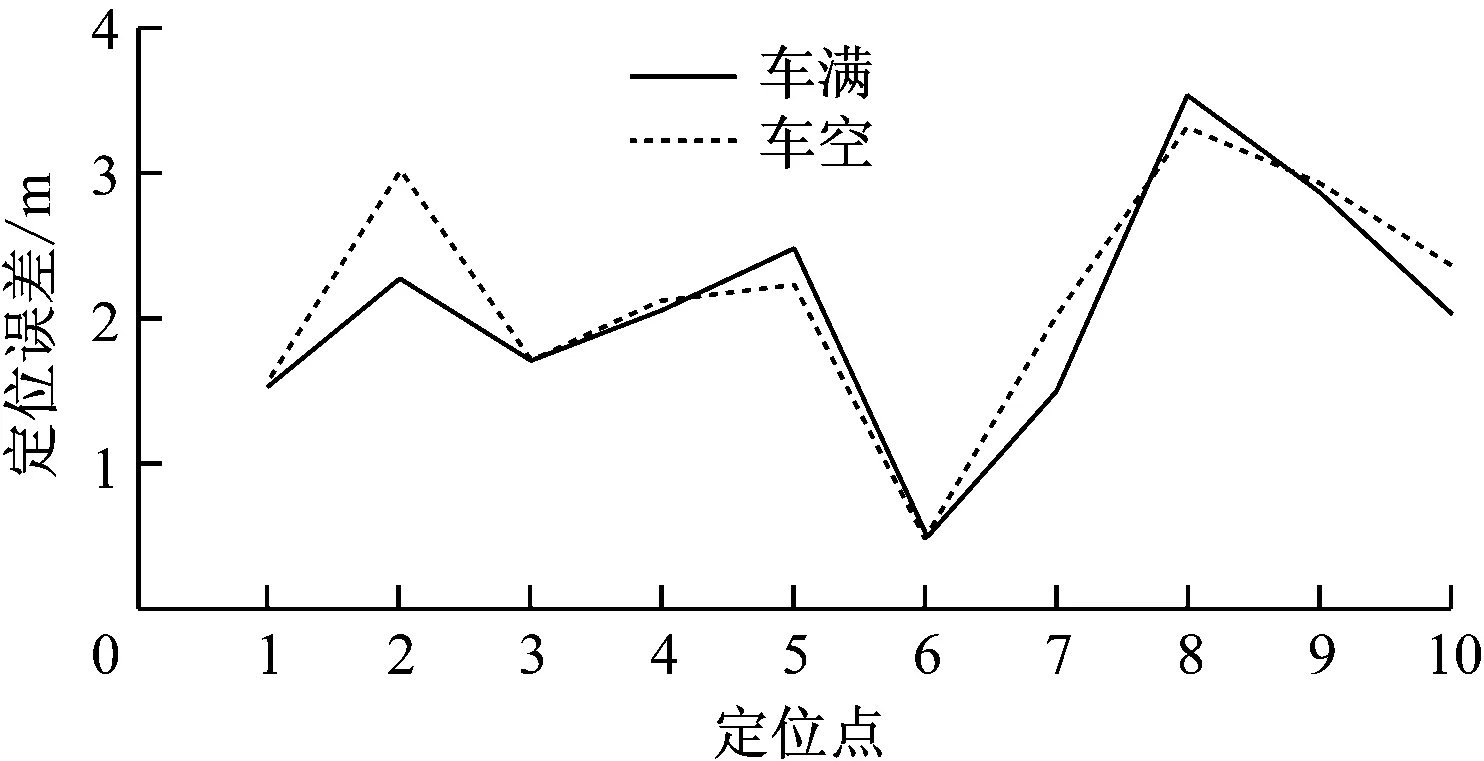
图6 车为空和车位满时的定位误差曲线
两种场景下的累积分布概率CDF曲线,如图7所示。

图7 车位满和车位空时的累积概率分布曲线
由图6和图7可知,车位空和车位满两种实验环境下,虽然采用了差异较大的数据样本,得到的定位误差值相差却不大,说明在算例中,环境条件对定位误差影响不大,即本方案可能为减小环境因素对定位误差的影响提供新思路。
3 总结
本文对一种新颖的基于OS-ELM 的位置指纹定位方案进行了实现和研究,并在地下车库场景进行了对比实验,测试结果表明:该方法可显著降低了传统方法离线阶段的时间成本以及环境变化时RSS值扰动对定位精度的影响。作为对文献方案的优化,本文通过去掉奇异值,进一步提高了定位进度,加快了算法收敛速度。
