基于模糊PID复合控制的医用控温毯控制系统设计
2018-12-21张元良勾万强
张元良,勾万强,张 敏
(大连理工大学 机械工程学院,辽宁 大连 116024)
0 引言
随着现代医疗技术的发展,医用控温毯在临床医疗中被广泛使用。最初医用控温毯采用压缩机制冷、电热丝加热的方式对毯内循环流动的热质进行温度控制。传统控温毯制冷、加热模式不统一直接导致冷热毯不能在一台主机上实现,且效率低、体积较大,这些弊端大幅限制了控温毯的使用范围[1]。随着半导体制冷/制热技术的发展,基于半导体制冷技术的医用控温毯大大拓展了医用控温毯的使用场合,其原理是利用帕尔贴效应[2]。半导体制冷/制热技术简单可靠,效率较高,大大减小了设备体积。制冷/制热模式的切换,可以通过改变半导体制冷器的电流方向实现。功率大小可通过控制半导体制冷器两端电压高低进行调节[3]。常用的温控方式有PID控制和模糊控制,由于医用控温毯控温过程属于大惯性环节,采用独立的模糊或者PID控制,很难达到理想的控制效果,为此,本文设计了一种基于模糊PID复合控制的控温毯控制系统。
1 医用控温毯控制系统硬件设计
设计的控制系统能够实现以下功能:①采集控温毯各工作部分的温度信号(因医疗仪器行业国家标准规定[4-5],此部分应注意加入电器隔离设计),采集实时水位报警信号;②通过触摸屏与用户进行人机交互;③将各项数据处理后输出相应控制信号,对半导体制冷制热器进行功率控制。
控制系统硬件包括主控板及驱动板两部分。主控板通过采集数据并进行运算,最终产生PWM控制信号给驱动板;驱动板采用大功率MOSFET阵列实现功率控制,采用两个单刀双掷继电器实现电流换向。
2 系统控制方法设计
2.1 系统模型
国家标准规定:医用控温毯在加热模式中,最高温度不能超过42 ℃;制冷模式中,最低温不能低于4 ℃。常用的温度控制方式有PID控制和模糊控制,但是这两种方式也有一定的局限性,PID控制容易产生超调、调节时间长的现象;模糊控制虽然调节时间短,但是容易产生稳态精度不高的现象。使用模糊PID复合控制方法不仅能使调节时间变短,而且能够实现较好的稳态精度。因此本文设计出一种用于控温毯的模糊PID复合控制方案。
图1为医用控温毯控制系统模型,主要由模糊控制器和PID控制器构成。两个控制器与被控对象之间设置一个切换开关,通过判断偏差e与设定阈值ε的大小来选择控制方式。当e>ε时,认为系统处于动态运行过程,选择模糊控制,可以发挥其调节时间短,没有超调的特点;当e≤ε时,认为系统处于稳态运行的过程,选择PID控制,可以发挥其稳态精度高的特点。
2.2 模糊控制器设计
系统选择双输入单输出模糊控制器,主要有3个功能:①模糊化,即把确定量转换为对应的模糊量;②模糊推理,即根据操作者的控制经验指定模糊控制规则,并进行模糊推理得到一个模糊输出量;③模糊判决,即把模糊量转换成对应的确定量。
模糊控制器的设计主要包括下面4个步骤:
(1) 输入输出语言变量选择:输入语言变量选择实际温度和给定温度的偏差e以及偏差变化率ec,输出语言变量选择控制驱动模块的PWM占空比u。


图1 医用控温毯控制系统模型
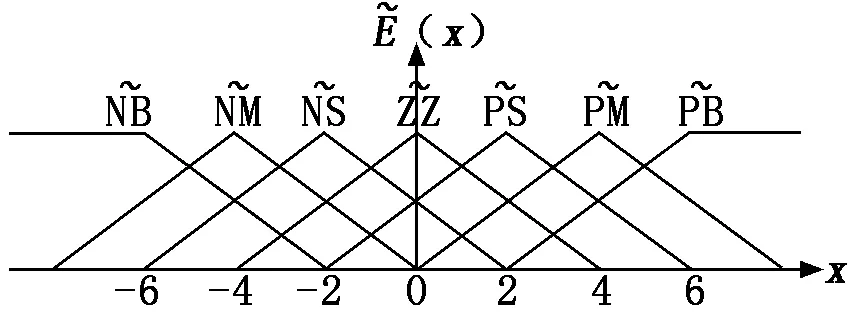
图2 隶属度函数

(3) 建立模糊控制规则表:双输入单输出的模糊推理规则为:


其中:∘为模糊集的合成运算符。整体模糊控制规则如表1所示。
(4) 模糊决策:模糊控制器输出的是一个模糊集合,模糊决策可以根据一个模糊集判决出一个确定的控制量作用于被控对象。这里采用加权平均法,输出量计算公式为:
其中:l为单点集数目;yi为离散论域的点;μ(yi)为相应点的隶属度函数值。
2.3 系统PID控制器设计
单片机属于数字控制系统[6],所以PID控制器应该选择数字PID控制器,本系统选择位置式PID控制器。位置式PID控制器表达式为:

其中:u(k)为第k个采样时刻需要作用于被控对象的输出量;Kp为比例环节系数;e(j)为j时刻的偏差;e(k)为第k个采样时刻的偏差;Ki为积分环节系数;Kd为微分环节系数。
PID控制器设计的关键在于三个参数的整定调试。首先确定比例系数Kp,将积分系数和微分系数设为零,采用二分法逐渐增大,查看输出响应,从中选取一个较为合适的Kp;然后保持Kp不变,将积分系数设为零,用同样的方法调试微分系数Kd;最后调试积分系数Ki。这样得到的三个系数并不一定是最优系数,还需要仔细微调,从而得到较为满意的控制效果。

表1 模糊控制规则表
3 系统软件设计
系统使用uC/OS-Ⅱ嵌入式实时操作系统,将整个系统划分为6个任务[7]:时基任务、存储任务、传感器任务、控制任务、液晶任务、报警任务。时基任务主要作用是为其他任务提供计时服务;存储任务通过控制EEPROM芯片[8]对系统的一些重要数据进行读取、写入,使系统断电后仍可以存储相关信息;传感器任务负责采集各个传感器的信号及状态;液晶任务负责与用户进行交互;报警任务实时监测传感器任务发送的信号量,对系统的运行状态进行报警提醒;控制任务是整个控制系统最为核心的内容,它决定了温度的控制效果能否达到控制要求。控制任务的算法流程如图3所示。首先进行定时器通道和PWM输出管脚的初始化,再设定模糊控制器和PID控制器的相关参数,然后判断定时采样时刻是否到来,如果到了采样时刻则计算偏差和偏差变化率,将偏差同偏差阈值进行对比,从而选择模糊控制还是PID控制,最后输出PWM控制信号。
4 实验
系统调试模拟用户实际操作进行,对系统分别进行升温及降温两项实验,每项实验分三组进行,分别为模糊控制、PID控制、模糊PID复合控制。
4.1 升温实验
(1) 模糊控制升温实验:测试环境温度为22.7 ℃,循环液体初始温度为21.3 ℃,设置温度为37.0 ℃,实验结果如图4所示。
(2) PID控制升温实验:测试环境温度为24.8 ℃,循环液体初始温度为24.3 ℃,设置温度为38.5 ℃,实验结果如图5所示。
(3) 模糊PID复合控制升温实验:测试环境温度为28.0 ℃,循环液体初始温度为25.2 ℃,设置温度为40.0 ℃,实验结果如图6所示。
4.2 降温实验
(1) 模糊控制降温实验:测试环境温度为27.6 ℃,循环液体初始温度为21.5 ℃,设置温度为15.0 ℃,实验结果如图7所示。
(2) PID控制降温实验:测试环境温度为25.1 ℃,循环液体初始温度为18.8 ℃,设置温度为10.0 ℃,实验结果如图8所示。
(3) 模糊PID复合控制降温实验:测试环境温度为22.0 ℃,循环液体初始温度为20.3 ℃,设置温度为5.0 ℃,实验结果如图9所示。
实验结果表明:独立的模糊控制不论是升温还是降温都会有稳态偏差较大的现象出现。独立的PID控制不论是升温还是降温都会有温度超调的现象出现。采用模糊PID复合控制不仅能很好地避免超调现象出现,同时稳态精度得到了很好的改善,系统达到稳态时,控制精度可达±0.2 ℃,系统采用的数字式温度传感器DS18B20[9]测量精度为±0.5 ℃,因此做误差累计,系统最终可将实际水温控制在设定水温的±0.7 ℃的范围内,符合国家标准及设计要求。
5 结论
本文介绍了一种高精度医用控温毯控制系统,创新性地采用了模糊PID复合控制方法,在设备可设定温度范围内,均可实现高精度的控温调节。实验结果表明:该方法相比于传统模糊控制及PID控制有鲁棒性强、超调小、控温精度高、调节时间短等特点;在设定温度范围内,超调均不超过±0.7 ℃。在接下来的工作中,将对设备进行电磁兼容测试。

图3 控制任务算法流程

图4模糊控制升温曲线图5 PID控制升温曲线图6模糊PID复合控制升温曲线

图7模糊控制降温曲线图8 PID控制降温曲线图9模糊PID复合控制降温曲线
