鞭打假人颈部标定中OC转角影响因素的研究
2018-12-21刘东春郑玉玉杨舒涵
刘东春,郑玉玉,王 旭,杨舒涵
(中汽研汽车检验中心(天津)有限公司,天津 300300)
0 引言
BioRID Ⅱ假人是C-NCAP(中国新车评价规程)鞭打试验指定使用的假人,用来评估汽车座椅的安全性能。按照2018版C-NCAP规定,使用BioRID Ⅱ假人完成5次试验后,需要对其颈部进行标定[1]。标定试验是保证假人生物拟合性的主要手段,用来确保假人在汽车碰撞时具备可靠的响应能力,可以真实客观地反映汽车的安全性能。
对BioRID Ⅱ假人颈部动态标定试验过程中有20多项技术指标需要同时满足要求,而且颈部标定的影响因素比较多,导致颈部标定成功率比较低。作者长时间的实际标定经验发现:颈部绕OC转角指标是决定标定试验成败的关键指标。本文用该指标代表颈部标定需求进行研究,重点分析其影响因素,以减少颈部标定动态次数,同时也减少标定对假人的伤害,提高BioRID Ⅱ颈部标定的成功率[2-3]。
1 BioRID Ⅱ颈部结构及标定
1.1 BioRID Ⅱ颈部结构
BioRID Ⅱ假人的脊柱是其核心部件,假人的脊柱结构如图1所示。脊柱结构包括7块颈椎、12块胸椎和5块腰椎,与人体脊柱块的数量完全相同,脊椎块通过销轴链接,在动态碰撞过程中可以转动,碰撞后亦可以复位。
1.2 BioRID Ⅱ颈部静态标定
BioRID Ⅱ假人静态标定是检查假人脊柱的曲率。首先将脊柱固定,并用专用夹具支撑假人脊柱,核查假人脊柱两侧螺钉扭矩;然后通过调整钢丝绳的张紧程度,以使图1中的各参数在规定的范围内:L1为[604,614],L2为[570,580],α为[29°,30°],β为[36.5°,37.5°],L3为[151,161],L4为[199,209]。
1.3 BioRID Ⅱ颈部动态标定
1.3.1 BioRID Ⅱ颈部动态标定流程
假人颈部静态标定完成后,再进行动态标定。其流程为:在温度为19 ℃~25 ℃、相对湿度为10%~70%的环境中,将假人的上躯干(拆除假人四肢以及臀部)固定在迷你小滑台上,然后用质量为(33.55±0.1)kg的摆锤冲击小滑台,如图2所示。其中,摆锤是由4根钢丝绳悬挂,通过调节摆锤的高度来控制对假人的冲击力,整个标定过程是模拟汽车追尾碰撞对假人进行后碰试验。

图1 BioRID Ⅱ假人脊柱结构

图2 BioRID Ⅱ假人颈部标定
1.3.2 BioRID Ⅱ颈部动态标定评价指标
BioRID Ⅱ颈部动态标定评价指标颈部绕OC转角通过率较低,对其的具体要求为:25 ms~70 ms时间段内达到极大值,且极大值区间为[11.5°,16.5°];125 ms~135 ms时间段达到极小值,极小值区间为[-9°,2°]。极值发生的时间区间基本可以满足,主要是两个极值以及两者的差值即跨度不容易满足要求,因此本文重点以这三个值为研究目标,分析其影响因素,进而指导标定调整方向,提高成功率。
2 BioRID Ⅱ颈部动态标定试验分析
BioRID Ⅱ假人颈部动态标定的主要影响因素有:摆锤速度、钢丝绳张紧程度、阻尼大小、相邻标定时间间隔、环境温度以及脊柱间橡胶缓冲块等。而在实际标定过程中,标定试验室温度基本恒定在20.6 ℃~22.2 ℃范围内,小范围的温度变化对BioRID Ⅱ假人颈部标定影响非常小,同时,脊柱间橡胶缓冲块定期更换,所以本文对这两个因素不作讨论,主要讨论其余4个影响因素。
为定量考察单一因素对OC转角的影响,将假人静态标定后钢丝绳和阻尼器的状态作为钢丝绳张紧程度和阻尼的基础值,摆锤速度为4.75 m/s,相邻标定时间间隔为60 min,环境温度为21 ℃作为其他三项各自的基础值。每次试验仅改变单一因子,其他因子保持基础值不变;然后,使用同一个BioRID Ⅱ假人进行统一化试验流程,并求取多次试验标准差与均值的比值(记为C.V)来判定各因素对OC转角的结果影响程度。
2.1 摆锤速度
将摆锤速度分别设定为4.70 m/s、4.75 m/s、4.80 m/s进行3次对比试验,得到的颈部绕OC转角极值与摆锤速度的关系如图3所示,不同速度对OC转角极值的影响如表1所示。由图3和表1可知:随着摆锤速度的增加,3次试验极值及跨度也呈现出增大的趋势,曲线虽有一定的差异,但差别不大;3次试验OC转角极大值、极小值及跨度的C.V分别为2.61%、-5.03%、1.4%,随着摆锤速度增加,摆锤和小滑台的碰撞能量亦增加,假人头部向前甩动幅度变大导致OC极值及跨度偏大。

图3 颈部绕OC转角极值与摆锤速度的关系
2.2 钢丝绳张紧程度
改变假人钢丝绳的张紧程度进行5次试验,用+n(n取值0,1,2)表示图4中的铜螺柱1、3张紧n圈,铜螺柱2、4松开n圈;用-n表示螺柱1、3松开n圈,螺柱2、4张紧n圈。试验得到的颈部绕OC转角极值与钢丝绳的关系如图5所示,钢丝绳不同状态对OC转角极值的影响如表2所示。

表1 不同速度对OC转角极值的影响

图4 BioRID Ⅱ颈部

图5 颈部绕OC转角极值与钢丝绳的关系

钢丝绳张紧圈数极大值(°)极小值(°)极值跨度(°)+212.68-3.9516.63+111.52-4.7716.28011.24-5.0916.33-110.86-4.8615.71-210.83-5.0915.92均值11.43-4.7516.17比值C.V(%)5.92-8.852.00
由图5可知:+2时,OC转角极大值最大,跨度亦最大;-2时,OC转角极大值最小;随着钢丝绳前紧后松的程度逐渐增加,OC转角极大值逐渐增大、跨度亦有变大的趋势。这是由于钢丝绳前紧后松之后,假人头部在受到相同能量的冲击后,向前可弯曲范围变大,反方向调整钢丝绳,假人向前可弯曲范围变小。由表2可知:钢丝绳调整对OC转角的影响相对非常大,5次试验其极大值、极小值及跨度的C.V分别为5.92%、-8.85%和2.00%。
2.3 阻尼大小
改变假人阻尼的大小进行5次试验,用0表示初始状态,用-0.5、-1、-1.5、-2表示松开的圈数。试验得到颈部绕OC转角极值与阻尼器的关系如图6所示,阻尼闭合变化对OC转角极值的影响如表3所示。
由图6可知:阻尼器松开0.5圈,OC转角极大值、跨度与初始状态略有增大趋势;而松开1圈,OC转角极大值、跨度明显变大;松开1.5圈,OC转角极大值、跨度增大趋势变缓,但变化在5次试验中结果最明显;松开2圈,OC转角极大值变化不大,且有渐小趋势。
由表3可知:阻尼松开0.5圈或者2圈时,OC转角变化不明显;而在阻尼松开1和1.5圈时,OC转角变化非常明显;5次试验的OC转角极大值、极小值及跨度的C.V值变化比较大,分别为8.74%、-19.98%和9.91%。

图6 颈部绕OC转角极值与阻尼器的关系
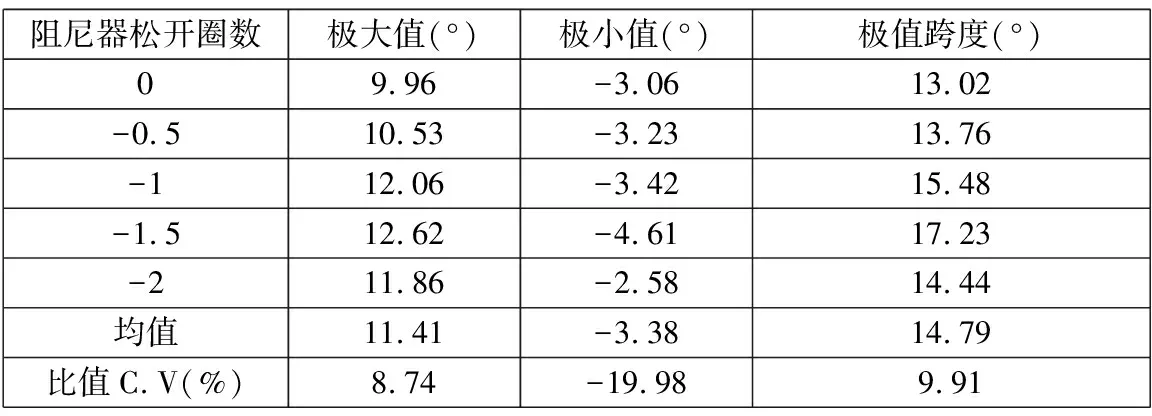
阻尼器松开圈数极大值(°)极小值(°)极值跨度(°)09.96-3.0613.02-0.510.53-3.2313.76-112.06-3.4215.48-1.512.62-4.6117.23-211.86-2.5814.44均值11.41-3.3814.79比值C.V(%)8.74-19.989.91
总体来讲,减小阻尼,OC转角极大值及跨度呈增加趋势;增大阻尼,OC转角极大值及跨度呈减少趋势。但是这种规律是当阻尼在一定的区间才有显著的差异,而超出这个范围,对OC转角的影响又变小。
2.4 时间间隔
将相邻试验时间分别设为15 min、30 min、45 min和60 min进行4次对比试验。得到的颈部绕OC转角极值与时间间隔的关系如图7所示,相邻试验时间间隔对OC转角极值的影响如表4所示。
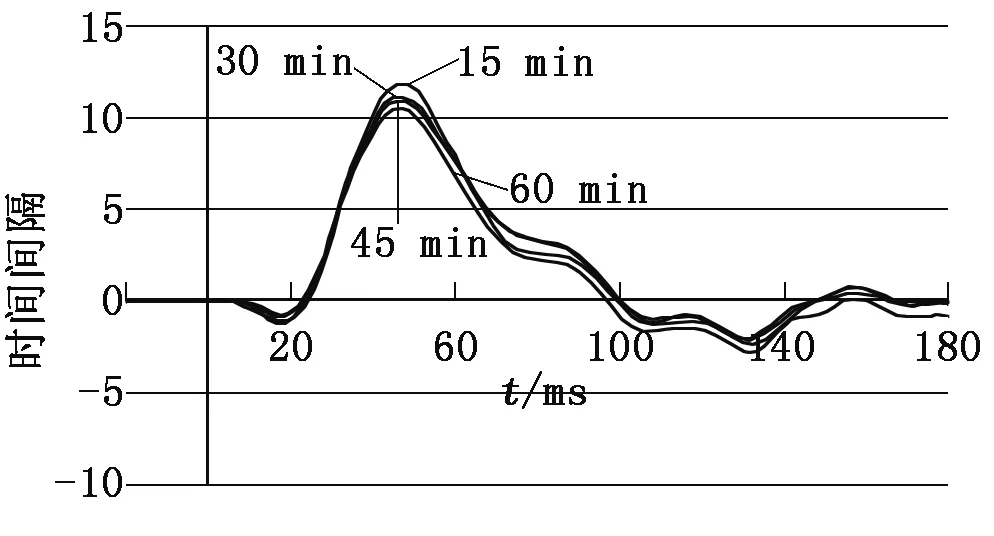
图7 颈部绕OC转角极值与时间间隔的关系
由如图7可知:试验间隔15 min时,OC转角极大值明显高于其他3次试验;试验间隔30 min和45 min两次试验曲线接近;试验间隔60 min和45 min略有差异,但并不明显。
由表4可知:4次不同的时间间隔导致的OC转角极大值、极小值及跨度的变化C.V分别为4.18%、-6.10%和2.50%,数值也不小,可见时间间隔也是一个不可忽视的影响因素。相邻试验时间间隔太短,假人内部的钢丝绳以及皮肤没有恢复到正常状态,仍处于形变阶段,其并不能真实反映假人的实际状态,所以,试验时间间隔务必60 min以上,才能保证试验结果的客观性和可信性。

表4 相邻试验时间间隔对OC转角极值的影响
3 结论
本文首先对BioRID Ⅱ假人颈部结构进行剖析,介绍静态标定和动态标定的过程。然后对颈部绕OC转角指标各主要影响因素进行单独剖析。
(1) 阻尼对OC转角极值影响尤为明显,假人阻尼存在敏感区域,当阻尼在该区域调整时,减小阻尼,OC转角极值呈增加趋势;增大阻尼,OC转角极值呈减少趋势,而超出这个敏感区域范围,阻尼对OC转角的影响又变小。
(2) 钢丝绳张紧程度也是重要的影响因子,钢丝绳前紧后松,OC转角极值会变大;钢丝绳前松后紧,OC转角极值会减小。
(3) 随着摆锤速度的增加,OC转角极值呈正相关,由于摆锤速度要求的区间范围较窄(4.70 m/s~4.80 m/s)内,因此在3次比对试验中并没有呈现显著的差异。
(4) 相邻试验时间间隔对试验的影响也相对显著,相邻试验时间太短,假人内部结构形变还没有恢复,并不能真实反映假人的实际状态,因此相邻试验时间间隔在标定过程中是不可忽视的因素。
