0.6米低轨星座Ka便携站天线新型设计*
2018-12-19李新华王新荣周一飞
王 毅,李新华,王新荣,周一飞
(中国空间技术研究院航天恒星科技有限公司,北京 100086)
0 引 言
为满足家庭用户、中小企业、手机回程、高速移动等宽带通信的需求,大容量低轨星座及对应的Ka高通量(HTS)卫星地面应用系统迅猛发展。HTS地面应用系统中的远端地球通信站——便携站,得到了发展和大量应用,也因此给便携站Ka频段通信天线提出了更高要求,如高性能、小型化、轻便易携带、可靠性高等。本文提出一种新型的低轨星座Ka便携站天线设计方法和模型,采用X-Y座架实现过顶跟踪,最大限度地保证通信系统的刚度和稳定性。
1 概 述
0.6 米Ka便携站天线满足与低轨卫星进行实时跟踪和通信,采用X-Y座架结构可实现过顶跟踪。该天线设计最大限度地保证系统的刚度和稳定性,满足携行对尺寸、重量要求,满足边瓣可拆装或折叠、体积小、重量轻、增益高、可背负或装箱拖行的特点。0.6米Ka便携站天线由天馈子系统、伺服子系统和结构子系统等组成,本文分别对各天线子系统进行了设计[1-2]。
2 天线设计
2.1 天线总体设计
0.6 米Ka便携站天线结构主要包含天线面板、X轴驱动部分和Y轴驱动部分,如图1所示。

图1 天线结构
2.2 天线面板设计
综合考虑天线射频性能和天线环境使用要求,0.6米Ka便携站天线采用环焦抛物面天线面板形式,其中主面采用分瓣形式,如图2所示[3-4]。

图2 天线面板设计
使用期间,利用快速卡扣将分瓣面板拼装在一起,在收藏状态可实现对面板的快速拆卸,从而减小装箱的难度,有效减少装箱的空间,提高整个天线的便携性。天线面板通过法兰与Y轴座架连接,能够实现天线面板随各个传动机构的运转。
2.3 天馈子系统设计
2.3.1 天馈子系统组成
天馈子系统作为天线系统前端设备,为通信信号提供进出地面设备的射频通路。
2.3.2 天馈子系统指标
0.6 米Ka便携站天线的天馈分系统的主要指标需求如表1所示。
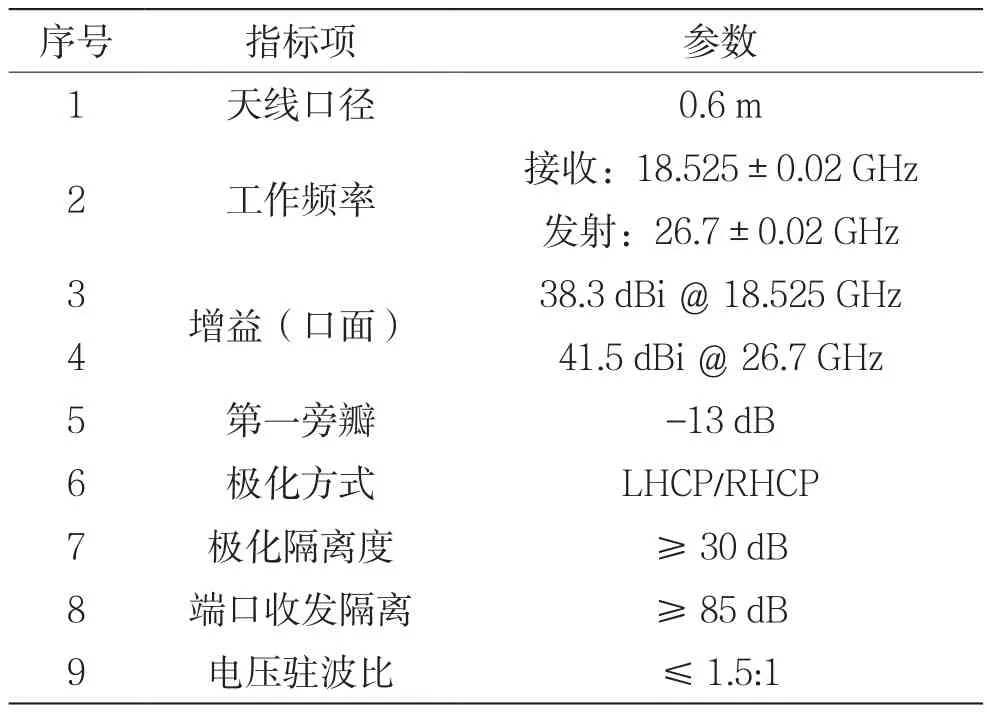
表1 天馈分系统主要性能指标需求
(1)天线形式及反射面设计
在Ka频段,f=18.525 GHz时,D/λ≈37,采用环焦天线的形式,综合分析取副面直径d=80 mm,实现天线高增益、低旁瓣的特性。在GRASP软件中建立环焦天线模型[5],将馈源方向图导入计算天线增益方向图[6],模型及仿真结果如图3、图4所示。

图3 GRASP中环焦天线仿真模型
(2)馈源及馈源网络设计
馈源形式如图5所示,选用大张角波纹喇叭方案,具有带宽宽、等化性好、相位中心稳定的特点。回波损耗仿真结果如图6所示[7]。
馈源网络的设计原理:波纹喇叭接收的Ka频段信号先通过圆极化器使信号完成线圆转换,再由正交模耦合器分成接收和发射两个端口;接收端口通过Ka频段阻发滤波器和Ka频段低噪声放大器连接,发射端口通过波导与Ka频段功率放大器连接。馈源网络的原理图和仿真模型如图7、图8所示[8]。

图4 天线在18.525 GHz方向图
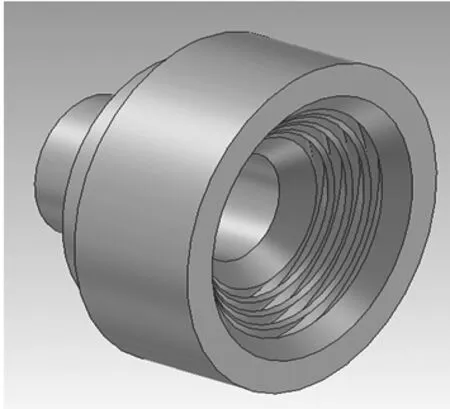
图5 馈源仿真模型
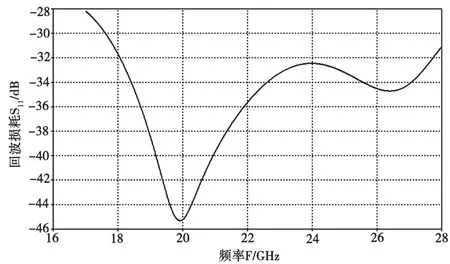
图6 馈源回波损耗仿真结果

图7 馈源网络原理

图8 馈源网络仿真模型
2.3.3 天线射频性能参数
0.6 米Ka便携站天线的主要性能指标均能满足指标要求,如表2所示。
2.4 天线伺服子系统
2.4.1 天线伺服子系统组成及工作原理
天线控制的根本目的是实现对目标的快速捕获和精确跟踪,并使之达到系统要求的跟踪性能和跟踪精度。

表2 天线性能指标结论
在控制结构上采用典型的位置环、速度环和电流环三环结构,以改善机电结合系统的性能。位置环是保证跟踪性能的外环;设计速度环是为了提高系统的抗负载扰动能力;设计电流环有利于改善电机的动态特性,克服力矩控制死区和非线性。在控制策略方面,采用多模式位置环路调节,使用不同的控制算法以适应天线在大范围调转、快速捕获目标和精确跟踪等不同工作状态的下对伺服系统不同状态的性能要求。控制逻辑运行于天线控制工控机平台,完成逻辑综合、控制和状态采集上报,大大提高了设备的集成度、可靠性和灵活性[9]。
天线控制子系统主要由天线控制单元(ACU)、天线驱动单元(ADU)(包含极化控制)、伺服电机和安全保护逻辑等组成,原理如图9所示。

图9 天线控制系统
2.4.2 天线驱动单元(ADU)
天线驱动单元(ADU)是天线控制子系统的一个重要组成部分,是天线控制的基础,具备以下功能:
(1)完成天线伺服驱动电信号的功率放大;
(2)完成电流、速度环控制,改善被控制对象特性;(3)完成天线安全运行所需的控制和保护;(4)接受天线控制单元(ACU)远控响应其指令,完成对应操作。
实际上,天线驱动单元是X轴、Y轴两个独立转动轴的转速、电流双闭环调速系统。X、Y轴均设置有抱闸装置,在天线设备进行维护。长时间停止工作的时候,可控制天线转到收藏位置,启动抱闸器实施加锁动作,以保护人身、设备的安全。
2.4.3 天线控制单元(ACU)
天线ACU的工作方式有待机、指向、数字引导和收藏等,均可工作于分控和本控模式。ACU需完成以下主要功能:
(1)天线各种工作方式的控制与切换;(2)位置环路的实现;
(3)伺服性能指标测试;
(4)设备故障检测和告警指示;
(5)测量数据与运行状态的实时显示、记录、处理,完成日志的记录和存储;
(6)与上位监控进行网络通信,接收上位监控的命令和参数,并将天线控制系统运行状态实时上报;
(7)接收DTE发送的数引数据/程引的轨道根数,并上报测角数据。
2.5 天线结构子系统
整架结构主要分为X轴、Y轴传动机构和倒伏机构。下面分别介绍各个部分的方案设计。
2.5.1 X轴、Y轴传动机构
X轴传动机构由X轴支撑座、减速装置、驱动装置及测角装置等部分组成,Y轴传动机构由Y轴支撑座、驱动系统和测角装置等组成,如图10、图11所示。电限位装置由微动式开关、开关支架、碰块、底座和防护罩等组成。碰撞块安装在X轴、Y轴上,正常工作时随轴一起转动,转动到感应点即发挥作用[10]。
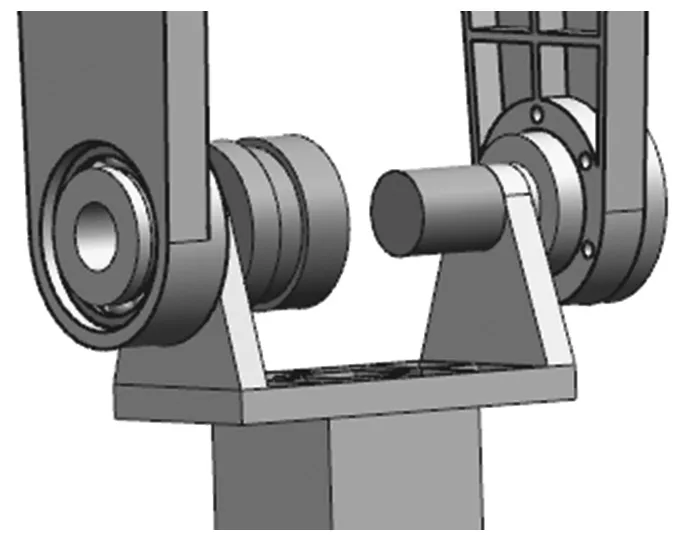
图10 X轴传动机构

图11 Y轴传动机构
2.5.2 倒伏机构
为了便于天线的收藏运输和在性能上起到便携的作用,对于整架天线的分析,在立柱与平台之间设立倒伏机构。
如图12所示,倒伏机构由倒伏支耳、驱动装置、回转支撑、机械/电限位保护装置、锁定装置和同步装置等组成,结构强度高,结构紧凑,相对重量、体积小。天线有机械限位和锁定限位之分,根据X(-90°~+90°)、Y(5°~8°)的要求,分别在各个运动机构中设立精准的角度对其进行限位。

图12 倒伏机构
3 结 语
完成了0.6米Ka便携站新型天线天馈子系统、伺服子系统、结构子系统等方面的设计,对电性能和结构性能进行了1:1建模仿真分析。分析表明,设计的0.6米天线性能参数均能满足低轨星座卫星系统对便携站天线的应用要求。
