基于无人机线路巡视的二次开发应用研究
2018-12-17何晓琴吕培庚李怀政
何晓琴,吕培庚,李怀政,吕 柯,余 乐
(1.重庆电力高等专科学校, 重庆 400050; 2.国网重庆市区供电公司, 重庆 400015)
电力输电系统的安全直接影响配电、变电和用电系统的安全。输电线路及其设施、设备的故障若不能被及时、准确地发现和消缺,将造成用电损失、设施设备故障隐患,甚至会有重大财产损失和生命危险。而输电系统中输电线路及其部分设备、设施常年累月暴露于野外,因受到持续的机械张力、电气闪络、材料老化、人为破坏等影响,产生断股、磨损、腐蚀等损伤,容易出现故障。基于这样的情况,电力公司及其检修公司都制定了比较详细的规章制度和较为规范的作业体系来开展输电线路及其电力设备巡视、消缺工作,以便于及时发现问题并尽早处理,保证输电线路稳定运行,从而既保证广大用户用电的可靠性与安全性,又防止由于输电设备故障带来不必要的损失。
随着信息技术的发展,利用无人机等设备对线路的巡检应用也越来越广泛,特别是对线路偏远、地形地貌复杂的地区,装配有高清数码摄像机和照相机以及GPS定位系统的无人机,可沿电网进行定位自主巡航,因此采用无人机巡检具有其他巡检方式不可替代的优势[1-5]。无人机是一个复杂的集航空、电子、电力、侦察、地理信息等的一体化系统,涉及航空、飞行自动控制、通信、数据链、红外识别、地理信息、卫星导航等多个高尖技术领域。由于无人机具备高空、远距离、快速作业的能力,在测绘、航拍、运动、军事、侦察、抗灾等方面已得到广泛应用,并且由于无人机控制技术的发展,可以进行遥测数据链控制、地理匹配控制、GPS 卫星定位控制。基于此,无人机线路巡线目前得到了广泛的应用。但是利用无人机进行线路巡线始终存在图像及GPS地理信息自动识别和分类问题,无论是在管理上,还是在技术、应用实施上都存在一定缺点,不能发挥无人机巡线的作用和优势。但是通过深入调查,无人机巡检线路还存在以下问题:通过无人机巡检所获取的信息特别是大量图像信息,目前还需要依靠人工的方式进行逐一识别、分类和删减,分类后的图像还需要与相对应的线路、杆塔及其上的设备相关联,再判断缺陷情况并进行相应的审核和消缺工作,工作量巨大,效率非常低下。无人机作为一种高科技设备,成本较高,目前利用其进行线路巡检并没有真正发挥作用,这也是对设备的一种变相浪费。
为实现对电力巡线进程的安全、规范、实时、高效、智能管理,对无人机线路巡视的二次开发应用研究是非常必要的。
1 基于无人机巡视的线路信息采集识别的二次开发平台
1.1 开发概况
基于无人机巡视的线路信息采集识别的二次开发包含移动终端操作系统研究与开发及PC后台信息综合管理系统研究与开发两部分。其中,移动终端操作系统主要实现无人机巡线任务查询、到岗签到、巡线数据采集及回传等功能;而PC端后台信息综合管理系统则主要实现对无人机的巡视轨迹进行跟踪,对采集的信息(特别是图像)自动识别,并对无人机GPS地理信息及图像进行分类,同时实现与相对应的线路、杆塔及其上的设备相关联等功能。此外,巡检人员还可在后台删减图像等信息,添加缺陷文字记录,完成审核、消缺登记等操作。基于无人机巡视的线路信息采集识别的二次开发平台的研究与开发概况如图1所示。
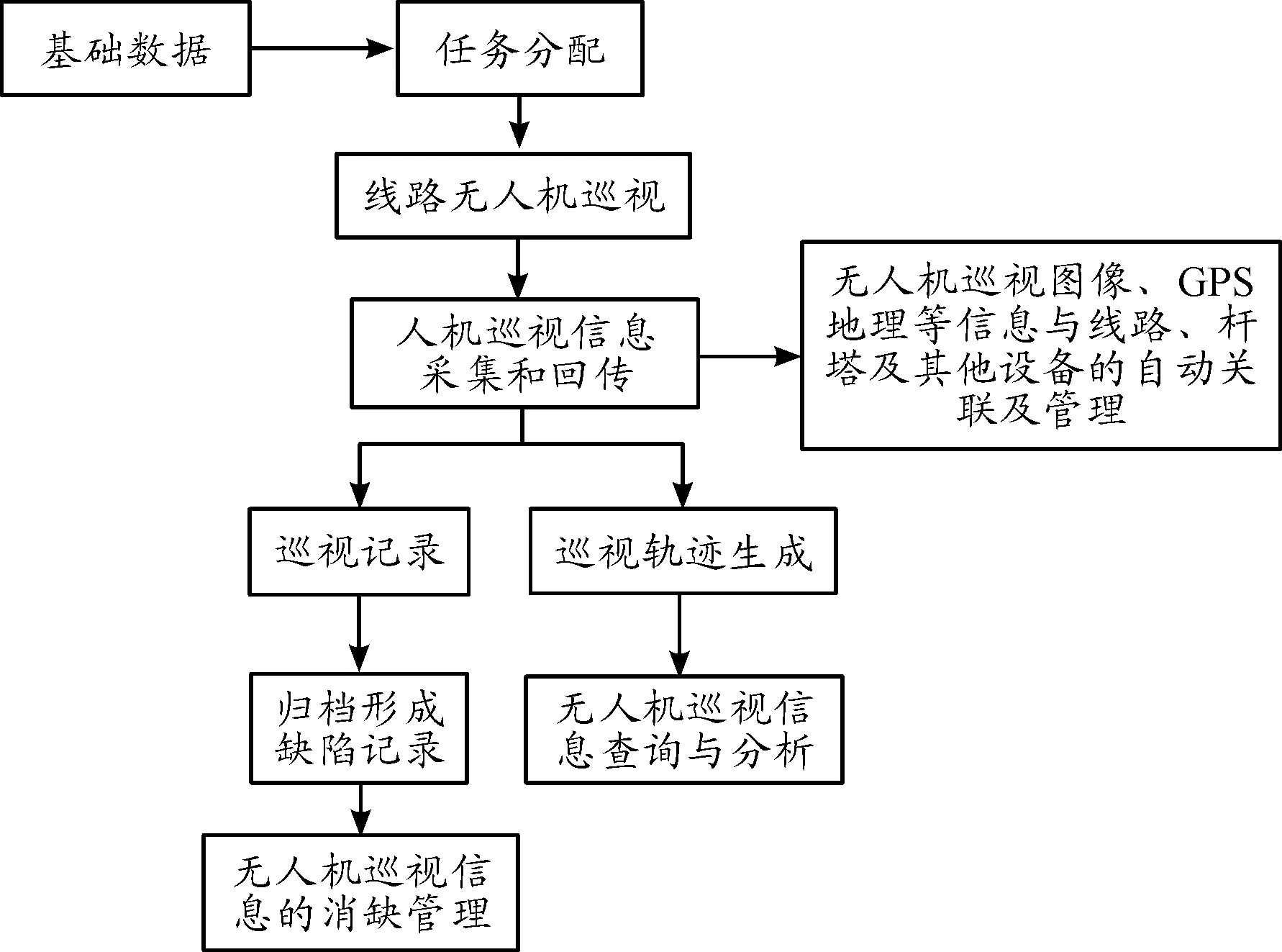
图1 基于无人机巡视的线路信息采集识别的二次开发平台概况
1.2 操作系统研究与开发
1.2.1 移动终端操作系统研究
无人机线路巡视地面操控人员通过登录基于智能手机或平板电脑的移动终端系统查看巡线任务,选择巡线任务,并完成下载后根据任务详情开始巡线作业。在无人机到达作业点时完成电子到岗签到,以杆塔为单位根据标准作业卡项目任务完成相应巡线操作及作业卡填报,发现线路缺陷时完成系统在线风险点登记等。移动终端所采集到的信息将实时回传至PC后台。移动终端操作界面如图2所示。

图2 移动终端操作界面
1.2.2 PC后台信息综合管理系统研究
PC后台信息综合管理系统可对无人机的巡视轨迹进行跟踪,对采集的信息(特别是图像)自动识别,并对无人机GPS地理信息及图像进行自动分类,同时与相对应的线路、杆塔及其上的设备进行自动关联。管理人员还可在后台删减图像信息,添加缺陷文字记录,完成审核、消缺登记等操作。同时对无人机巡视任务进行分级、分类管理,操作界面如图3、4所示。
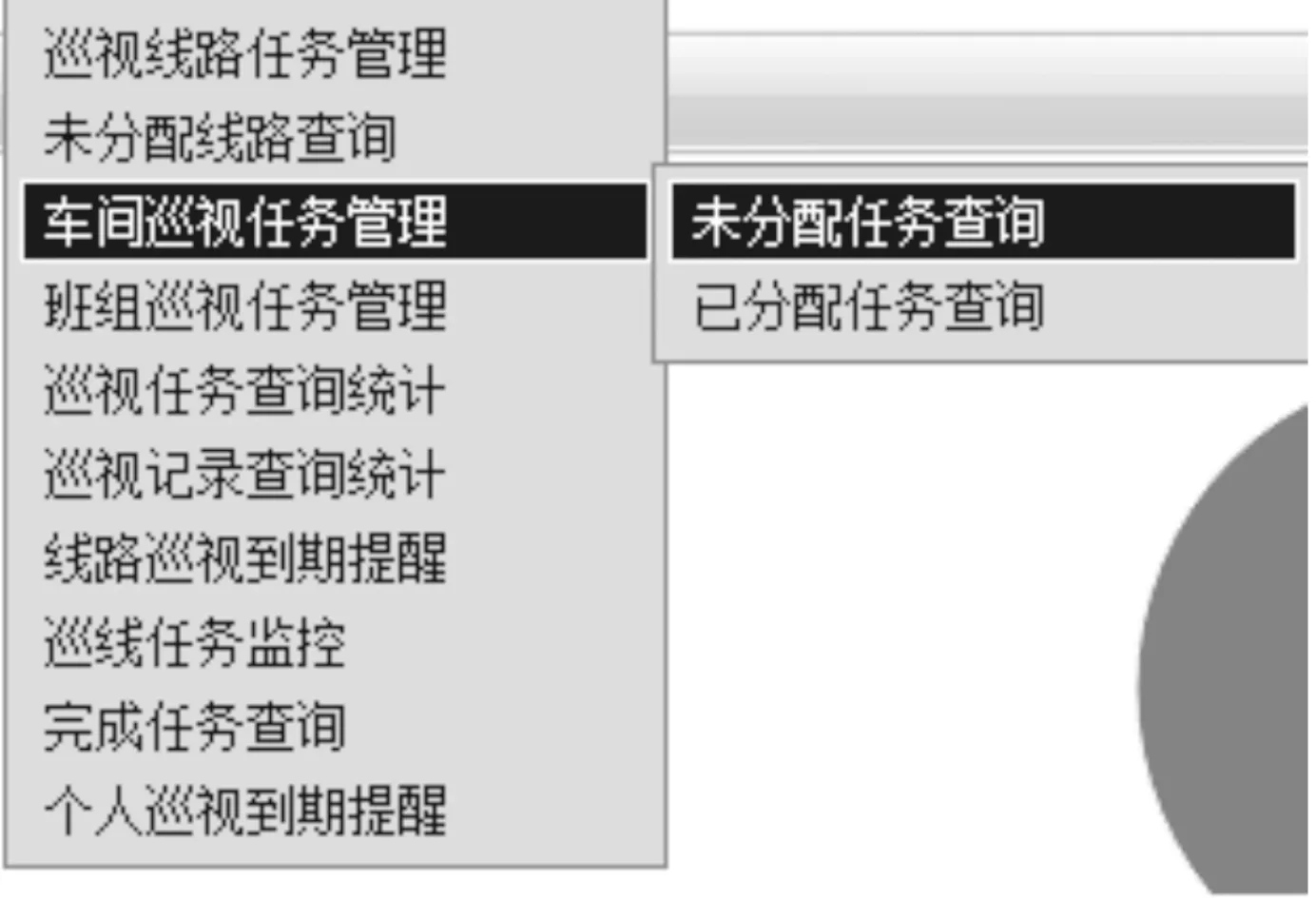
图3 分级任务分配界面
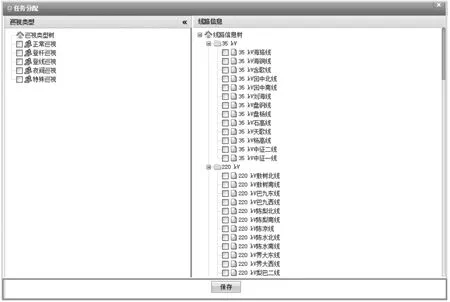
图4 具体任务分配界面
无人机巡线任务审核功能部分系统核心代码如下[6-8]:
public class TAuditTaskAction extends BaseFlowAction
private static final long serialVersionUID = -5637878664646067067L;
@Autowired
private TAuditTaskService service;
@Autowired
private UserInfoService userservice;
private HashMap
public HashMap
return code;
}
public void setCode(HashMap
this.code = code;
}
@Override
protected BaseService
return service;
}
public String auditTask(){
try{
service.auditTask(entity,request);
message="1";
} catch (Exception e) {
message = "0";
e.printStackTrace();
}
return "MESSAGE";
}
@ResourceAuth
public String queryInspectionrecordList() {
if (pager == null)
pager = new PagerVO();
if(pager.getQc()==null){
pager.setQc(qc);
}else{
if(qc!=null)
pager.getQc().putAll(qc);
}
pager = service.queryInspectionrecordList(pager);
results = new Hashtable
results.put("pager.pageNo",pager.getPageNo());
results.put("pager.totalRows",pager.getTotalRows());
results.put("rows",pager.getRows());
//results.put("sort",qc.get("order"));
results.put("direction","desc");
return "PAGE";
}
@ResourceAuth
public String queryCardrecordList() {
if (pager == null)
pager = new PagerVO();
if(pager.getQc()==null){
pager.setQc(qc);
}else{
if(qc!=null)
pager.getQc().putAll(qc);
}
pager = service.queryCardrecordList(pager);
results = new Hashtable
results.put("pager.pageNo",pager.getPageNo());
results.put("pager.totalRows",pager.getTotalRows());
results.put("rows",pager.getRows());
//results.put("sort",qc.get("order"));
results.put("direction","desc");
return "PAGE";
}
}
2 研究前景
本文提出的基于无人机巡视的线路信息采集识别的二次开发平台的建立,可实现对无人机巡视信息进行采集和回传,并通过PC平台对无人机的巡视轨迹进行跟踪,对采集的信息(特别是图像)进行自动识别,对无人机GPS地理信息及图像进行分类,同时与相对应的线路、杆塔及其上的设备相关联;巡检人员还可在后台对图像等信息进行删减、添加缺陷文字记录、审核、消缺登记等操作。本项目的应用可实现无人机巡检与其他巡检方式进行有效对接,充分发挥高科技巡检设备的作用,使巡检工作全过程可控,提高巡检工作管理水平,具有广阔的发展应用前景。
3 结束语
本文根据实际需要对基于无人机巡视的线路信息采集识别的二次开发平台这一新的信息技术管理平台进行了研究,解决了无人机进行线路巡线时存在的信息采集无法自动识别和分类等问题,在管理上、技术上及应用实施上都充分发挥了无人机线路巡检的作用和优势。本系统的开发设计将在实际应用中进行检验,并在向各电力公司进行的项目推广中根据用户需求做进一步的完善,使本系统平台技术更加成熟,功能更加完备与人性化。
