GA-BP在化工园区VOCs预测模型中的应用
2018-12-13牛玉霞
任 伟 牛玉霞
(南通科技职业学院 江苏 南通 226007)
0 引 言
中国制造业的发展在全世界屈指可数,拥有很多大规模的制造业园区,生产流程都设在园区内,而且大多数的制造业园区都会存在VOCs的治理问题[1]。从当前工业源的排放状态来看,园区内的VOCs排放量占据了一半以上,由此可见对园区的VOCs综合整治将是未来国内实现VOCs减排的必然发展趋势[2-4]。工业园区的VOCs泄露问题不单单会对环境造成很大的污染,而且还会引起多种事故,威胁人们的生活和生产安全[5-6]。此时,需要组建VOCs预测模型对工业园区的VOCs进行预测,但是在对工业园区VOCs进行实际预测过程中,相对于大多数的模型无法详细拟合出VOCs不同状态,致使其对工业园区VOCs预测陷入了瓶颈。在这种情况下,对工业园区VOCs预测问题成为了制约环境治理领域发展的一个重要因素,引起了很多专家和学者的重视[7]。
目前,关于工业园区VOCs预测模型的研究有很多,其相对研究也出现了一定的成果。文献[8]将马尔柯夫链理论引入到对VOCs预测中,给出VOCs的状态变化规律,由此组建工业园区VOCs预测模型。利用该模型进行工业园区VOCs预测具有预测成本低的优势,但是该模型受环境干扰因素较大,无法详细地拟合出VOCs不同状态,存在预测误差大的问题。文献[9]利用高斯混合模型计算VOCs不同状态的概率分布,利用高斯过程回归预测VOCs的动态变化轨迹,在此基础构建工业园区VOCs预测模型。该模型预测响应性高,但是传感器选择不具有唯一性,输出的参数不确定,存在拟合效果差的问题。文献[10]采集不同长度的VOCs轨迹,拟合VOCs各轨迹的误差,预测轨迹VOCs将来的变化趋势,由此组建工业园区VOCs预测模型。该模型预测灵敏度较高,但原始权值或者阈值的随机性容易产生局部最优解的问题。
针对上述问题,提出了一种基于遗传算法和BP神经网络的工业园区VOCs预测模型。实验仿真证明,所提模型预测可靠性高,分辨力强,为工业园区的VOCs全面治理提供了思路。
1 建模原理
在组建工业园区VOCs预测模型过程中,通过VOCs采样点的位置信息获取VOCs状态的原始轨迹序列,采用其中两个不同方向的轨迹矢量定义VOCs状态变化的轨迹数据,并用高斯函数表述VOCs的各个状态,对VOCs状态数据进行聚类。定义VOCs状态轨迹的投影矢量级,由此组建工业园区VOCs预测模型。具体的步骤如下:

(1)

对VOCs状态空间2维平面X轴和Y轴进行建模,利用下式通过不同方向的轨迹矢量映射轨迹数据变量:
(2)



(3)



(4)

(5)

(6)
综上所述可以说明,工业园区VOCs预测建模原理,利用原理组建工业园区VOCs预测模型。
2 优化模型
2.1 拓扑结构的组建
为了更好地进行工业园区VOCs预测,采用BP神经网络对VOCs状态进行泄露判断,建立三层的神经网络,对原始VOCs状态变化时间序列进行自相关与偏相关分析,得到VOCs状态变化时间序列自身存在规律。具体步骤如下详述:


(7)



(8)


(9)
式中:(n1)代表其神经元数量,a代表常数。
2.2 优化模型的建立
对s(o″)代表的VOCs计量数据进行关于泄露指标的评价,得到p″(j)代表的评价指标的数据集,利用下式对各个VOCs状态评价指标数据进行归一化处理:
(10)


(11)
式中:n″代表样本输入的数量,yi代表BP网络的预测结果,mse代表均方误差函数。


(12)
3 实验与仿真证明
为了证明提出的工业园区VOCs预测模型的有效性,需要进行一次实验。实验数据来源于2017年5月至11月监测的某城市工业园区VOCs数据集,对该数据集进行归一化处理,选取60%处理后的数据集为测试数据集,剩下的数据集为训练数据集,在Mat-lab7.1环境下搭建工业园区VOCs预测模型的实验仿真平台。实验参数如表1所述。

表1 实验参数设置
3.1 评价指标的设定
在实验过程中,为了更好地评价基于遗传算法和BP神经网络的工业园区VOCs预测模型进行工业园区VOCs预测性能,将实验分为主观评价和客观评价两个不同的部分。第一个部分,以对工业园区VOCs预测的拟合优度作为主观评价指标来评价基于遗传算法和BP神经网络模型进行工业园区VOCs预测的优越性。第二个部分,为了更好地彰显实验的全面性和公正性,将文献[9]所提基于高斯混合模型作为对比模型,将VOCs状态变化时间序列间的相关性和VOCs状态特征波动程度作为客观评价指标来评价不同模型进行工业园区VOCs预测的质量。


(13)

(14)
(15)
3.2 拟合优度的评价
利用提出的工业园区VOCs预测模型进行工业园区VOCs预测实验,测试实际VOCs状态和预测VOCs状态间的拟合优度,测试结果见图1。

图1 基工业园区VOCs预测模型拟合优度测试
从图1的实验仿真中可以分析得出,利用基于遗传算法和BP神经网络的工业园区VOCs预测模型进行工业园区VOCs预测的结果和实际的工业园区VOCs状态较为吻合,可以说明BP神经网络具有很强的自学能力且能以任意精度逼近非线性函数,充分满足了工业园区VOCs预测对其拟合精度的需求。
3.3 不同模型工业园区VOCs预测的质量
分别利用基于遗传算法和BP神经网络的预测模型和文献[9]所提基于高斯混合模型进行工业园区VOCs预测实验,对比不同模型进行工业园区VOCs预测的VOCs状态变化时间序列间的相关性和VOCs状态特征波动程度,利用对比的结果衡量不同模型进行工业园区VOCs预测的整体优越性,对比结果见图2和表2。
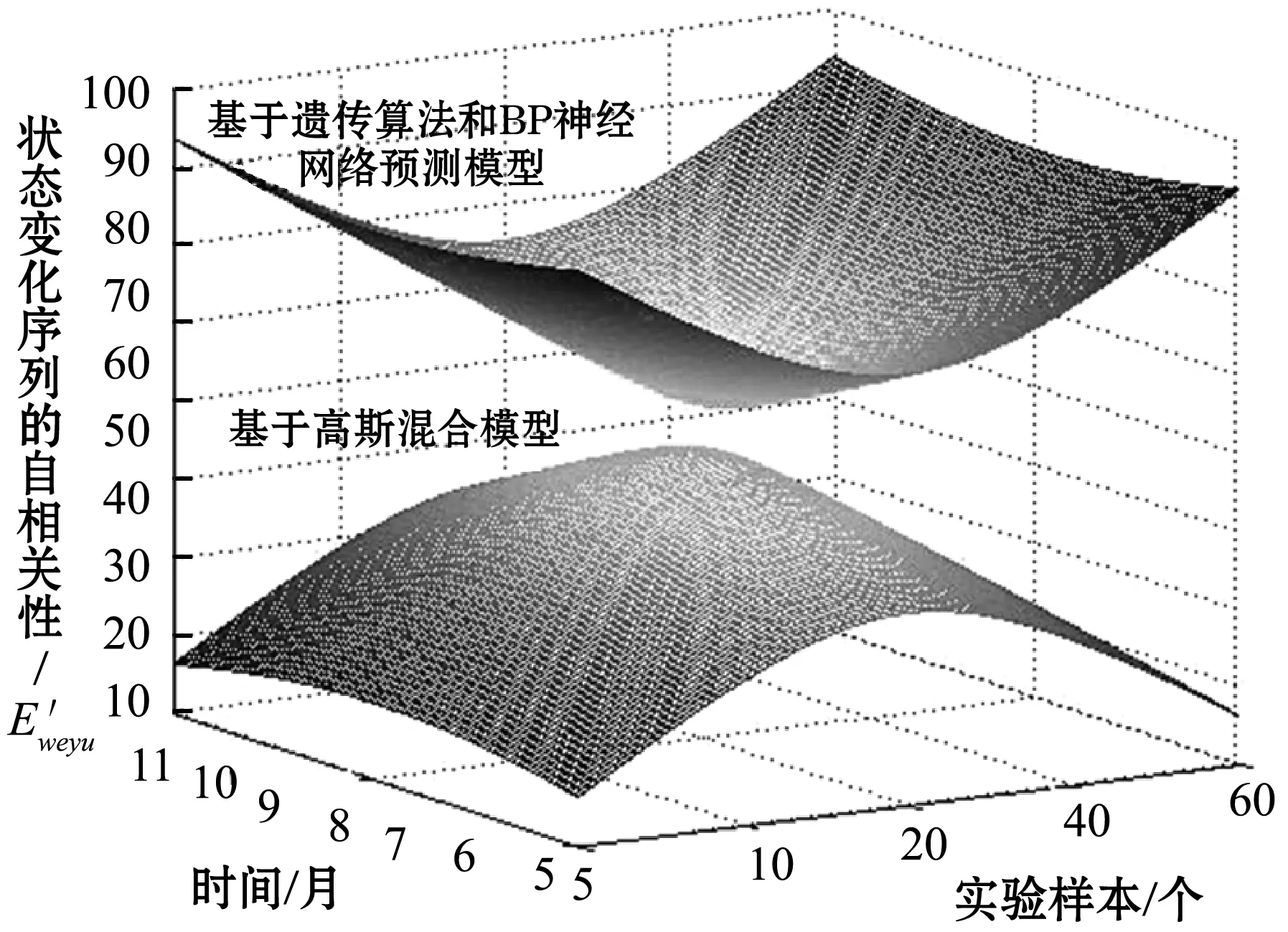
图2 不同模型进行工业园区VOCs预测的自相关性
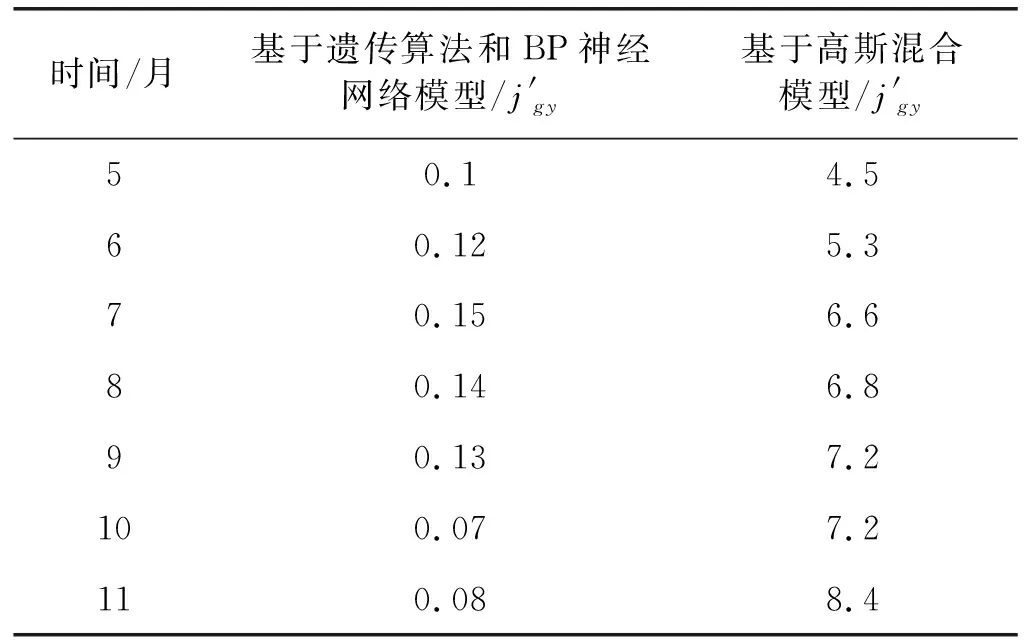
时间/月基于遗传算法和BP神经网络模型/j'gy基于高斯混合模型/j'gy50.14.560.125.370.156.680.146.890.137.2100.077.2110.088.4
从图2和表2的实验仿真结果中可以分析得出,利用基于遗传算法和BP神经网络的预测模型进行工业园区VOCs预测的VOCs状态变化时间序列间的相关性要高于文献[9]所提基于高斯混合模型,并且VOCs状态特征波动程度较低。这主要是因为基于遗传算法和BP神经网络的预测模型选取了VOCs状态污染指数样本数据指标,通过计算VOCs状态污染指数个体的适应度,将适应度低的个体淘汰,构建工业园区VOCs预测模型,将VOCs污染指标的样本数据作为模型的输入样本,以VOCs泄露嫌疑系数作为输出变量,满足了工业园区VOCs预测对其实时及连续预测需求。
4 结 语
针对采用当前模型进行工业园区VOCs 预测时,VOCs受外界因素影响较大,无法详细描述出VOCs不同状态,存在预测误差大的问题。提出一种基于遗传算法和BP神经网络的工业园区VOCs预测模型。实验仿真证明,所提模型预测可靠性高,分辨力强,为工业园的VOCs全面治理提供了思路。
