某型无人直升机拖车控制系统设计
2018-12-12吴永建申焕萍张采泉
吴永建,申焕萍,张采泉
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
无人直升机装卸是在无人直升机转运前后将其从地面装载到运输车以及从运输车卸载到地面而进行的一项工作[1]。目前某型无人直升机的装卸工作由地面平板拖车、车载平板拖车和电葫芦装置协作完成,如图1所示。这种方法装载时,需要4人将机体抬上平板拖车,之后将机体拉至运输车方舱附近;接着操作电葫芦将机体竖直拉起,拉起过程中需要扶住机体以防止磕碰损伤;当机体起落架达到运输车底面高度时,旋转电葫芦支臂将机体放置于方舱内;最后在舱内将机体再次人工抬起搬至车载平板拖车上并固定。
该装卸方法存在诸多弊端,如拖运机体时耗费大量人力,舱内空间狭小,人力搬动机体极为不便,进出舱时机体自由度过多带来安全隐患等。因此,亟需改进当前基于平板拖车的无人直升机装卸方法,实现一种人力投入少,操作便捷性高,机体和人员安全风险低的装卸方法。

图1 平板拖车装卸无人直升机
装卸方法改进的关键在于替代人力完成机体拖运和限制进出舱时机体的自由度。为此,本论文提出了一种基于机电化拖车的无人直升机装卸方法,并详细阐述该新型拖车控制系统的设计。
1 机电化拖车装卸方法
机电化拖车装卸方法在运输车后端加装液压尾板以替代电葫芦完成机体竖直方向的搬运工作;设计机电一体化的拖车以替代人力完成机体水平方向的搬运工作;在尾板和方舱上布置拖车导轨以限制拖车(机体)自由度;在运输车舱内布置锁紧电机以固定机体。
无人直升机装载与卸载互为逆过程,以装载为例,系统工作的一般过程是:机体在地面时,拖车托架将机体架设到拖车上,通过控制拖车进舱运动将机体装载到尾板上并固定,再控制尾板竖直上升运动至方舱底面,最后控制拖车沿着导轨进舱运动至舱内所需位置并固定。
2 控制系统设计
2.1 系统组成与控制原理
2.1.1 系统组成
鉴于某型无人直升机尺寸较小,运输车可同时并排容纳2架机体,系统地设计了整套拖车装卸控制系统,控制2辆拖车以提高装卸工作效率。拖车装卸控制系统由拖车、PLC[2]控制中心、PLC信号输入、PLC信号输出等分系统组成,其中各分系统部件详见表1。
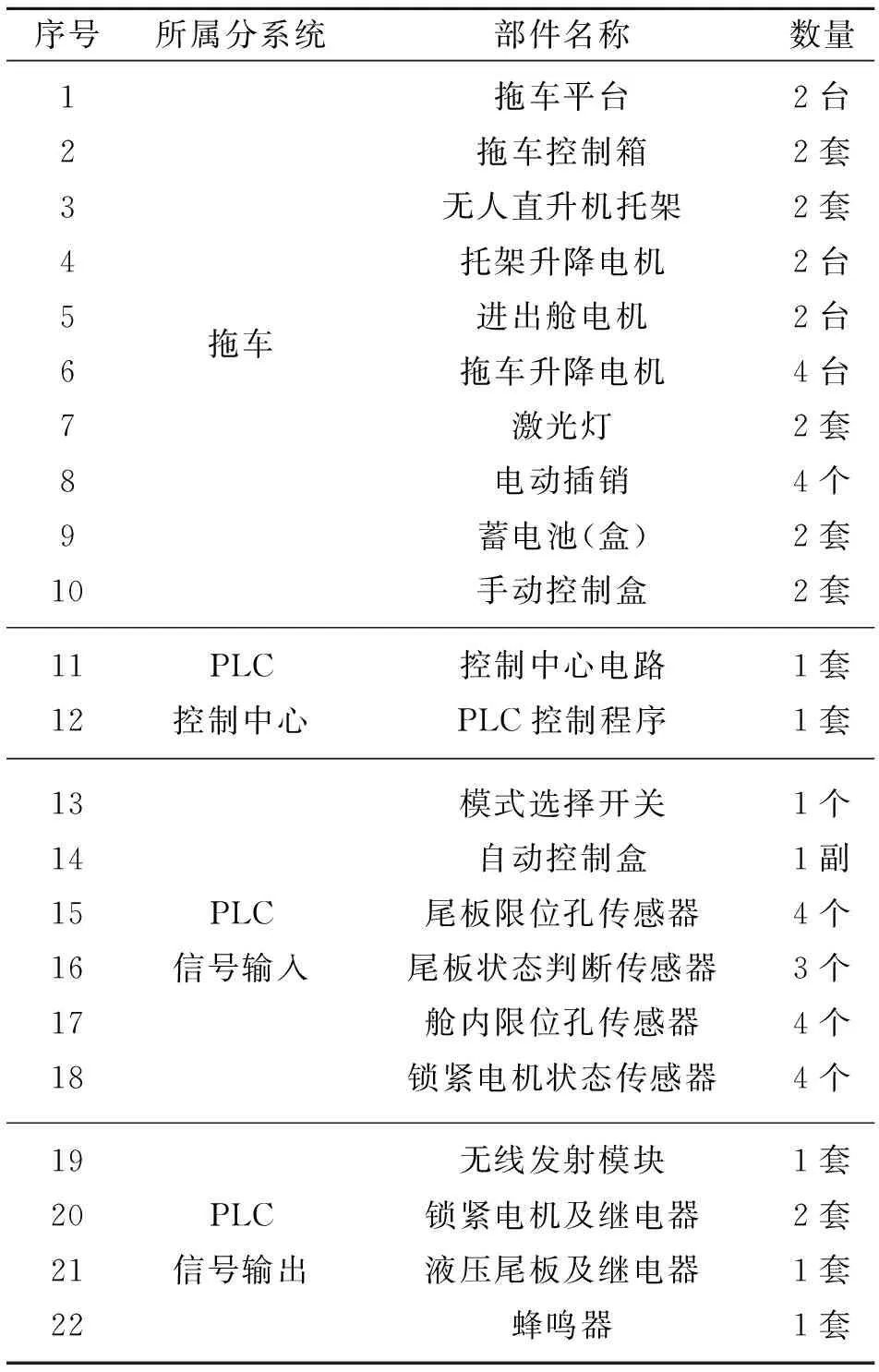
表1 各分系统部件列表
2.1.2 控制原理
系统控制原理如图2所示。拖车控制系统控制模式分为手动控制模式和自动控制模式,通过拨动模式选择开关进行选择。手动控制模式时,操作人员直接通过拖车上的手动控制盒控制拖车上的执行器。自动控制模式时,操作人员通过自动控制盒将操作信息输入给PLC,同时PLC接收各类传感器信息;PLC控制程序根据所获得的信息,输出控制拖车、尾板和锁紧电机;其中控制拖车是无线通信方式间接控制。自动控制盒、手动控制盒操作按钮示意图如图3所示。
2.2 硬件电路设计
硬件电路分为系统控制箱电路和拖车控制箱电路两部分。
2.2.1 系统控制箱电路
系统控制箱电路概图如图4所示,主要包括:电源、自动控制盒、传感器(限位开关)、西门子PLC 222、西门子PLC EM223、无线发射模块、尾板控制继电器、锁紧电机继电器等器件及其电路。

图2 系统控制原理图
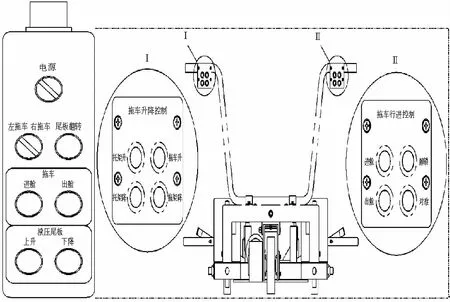
图3 自动控制盒(左),手动控制盒(右)
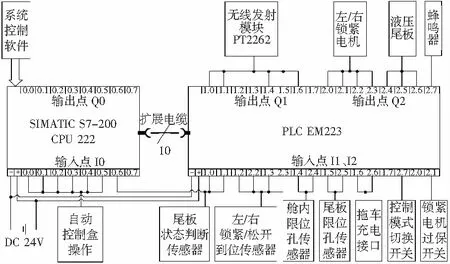
图4 系统控制箱电路概图
2.2.2 拖车控制箱电路
无人直升机拖车控制系统控制左右两辆拖车,每辆拖车独立拥有1套拖车控制箱电路。拖车控制箱电路概图如图5所示,主要包括:电源、手动控制盒、无线接收模块、各类控制继电器、电动插销(电磁铁)、进出舱电机、托架升降电机、拖车升降电机、激光灯等器件及其电路。
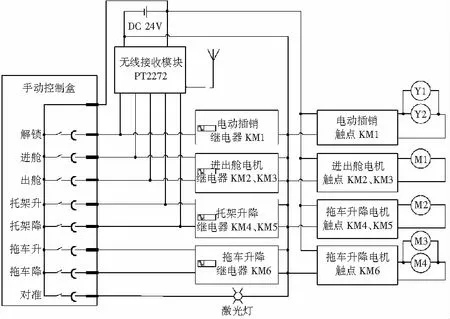
图5 拖车控制箱电路概图
2.3 软件设计
2.3.1 软件功能
为实现系统功能,软件满足如下要求:
1) 具有采集自动控制盒操作信息、传感器信息的功能;
2) 具有输出控制拖车、尾板、锁紧电机、蜂鸣器的功能;
3) 实现自动、手动两种控制模式;
4) 实现故障自诊断及报警功能。
2.3.2 子程序设计
为保证控制程序结构清晰、调试高效,设计了软件所需调用的子程序,各子程序及其功能详见表2。
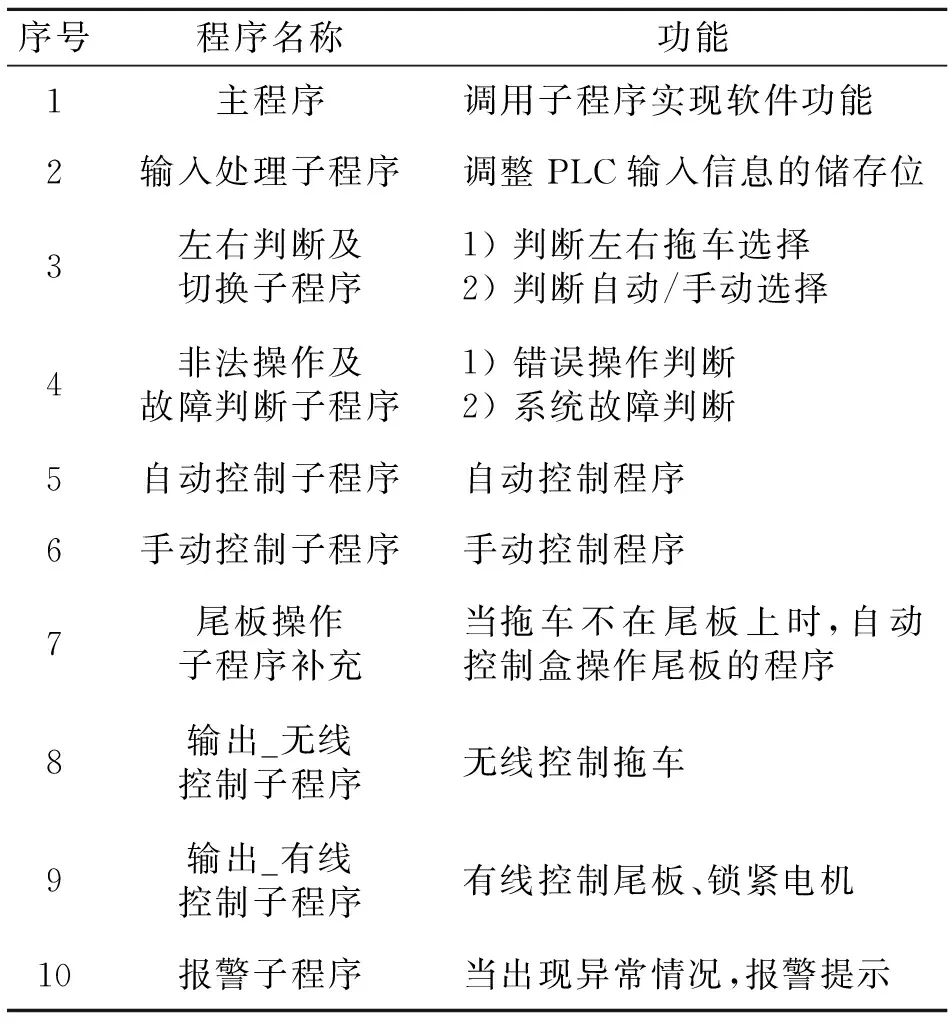
表2 各子程序及其功能
2.3.3 程序运行流程图
根据系统对自动控制、手动控制两种模式所需实现的功能要求,编制程序运行流程图,如图6所示。
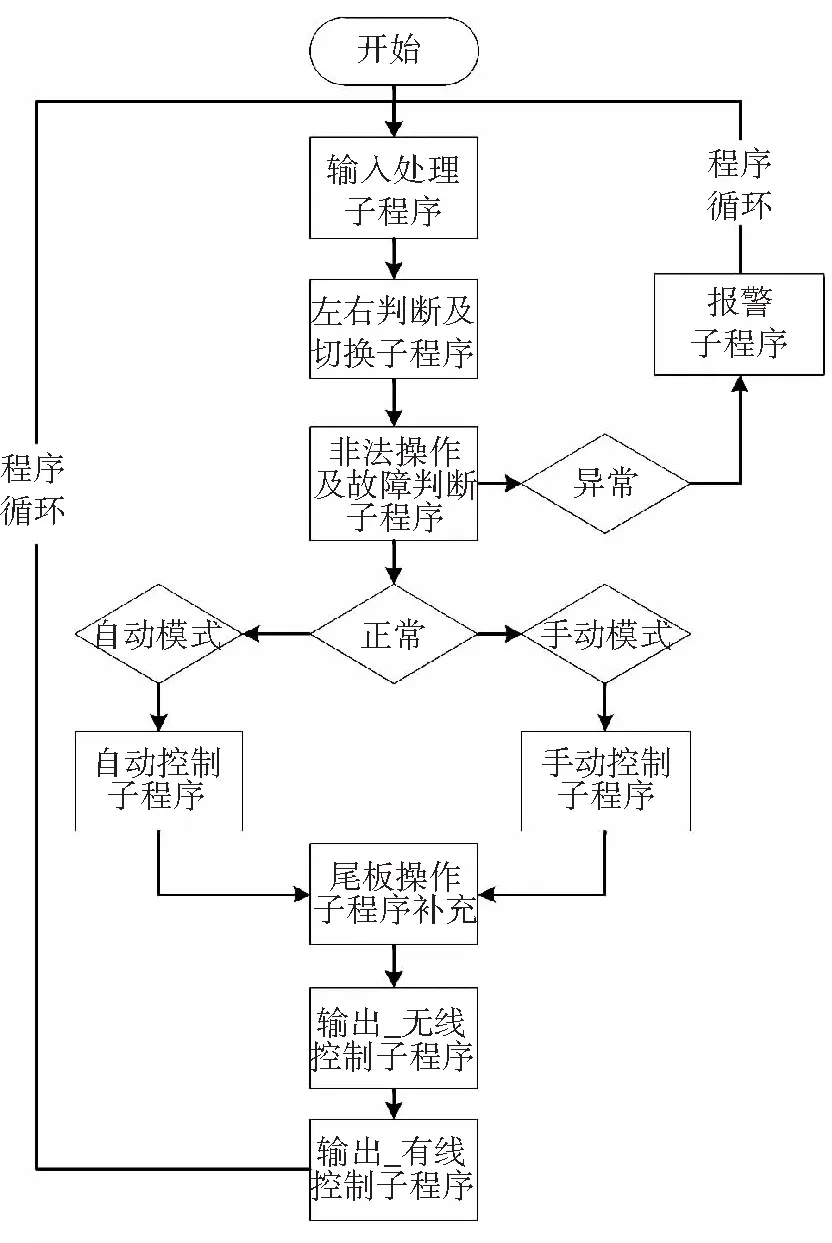
图6 程序运行流程图
2.3.4 程序编写与仿真
在西门子PLC的开发环境STEP7 Micro/WIN中采用梯形图的形式编写所需程序。在开发环境中编译最终形成的工程程序,输出的仿真文件导入到仿真软件S7_200.exe中进行仿真。通过手动操作PLC的相应输入,观察输出灯及内部储存位的数值,以判断程序是否实现所需逻辑功能。
3 系统验证
软件仿真通过后,将程序下载到运输车舱内系统控制箱的PLC机中运行测试。经实际操作测试,系统实现了拖车的自动控制模式功能与手动控制模式功能。
自动控制模式时,拖车从运输车方舱初始位置出舱将无人直升机卸载到地面的步骤如下(如非特殊说明,所有操作按钮均在自动控制盒上):
1) 操作人员按下自动控制盒“出舱”按钮,锁紧电机松开,释放机体;
2) 锁紧电机松开限位开关有效后,拖车托架升降电机做上升动作,托架托起机体上升运动;
3) PLC上升定时时间到,电动插销解锁,拖车进出舱电机做出舱动作;
4) 当拖车电动插销到达尾板限位孔时,尾板限位孔处限位开关有效,拖车自动停止运动;
5) 按下“尾板下降”按钮,液压尾板开始下降;
6) 当尾板下降到地面时,尾板下降限位开关有效,尾板自动停止下降;
7) 按下“出舱”按钮,电动插销解锁,拖车出舱运动至地面;
8) 按下手动控制盒“拖车上升”按钮,拖车升降电机顶起拖车,驱动轮脱离地面后,人工将拖车移动至指定地点;
9) 按下手动控制盒“托架下降”按钮,托架下降运动,机体起落架下降至地面后,人工移动拖车,最终拖车与机体分离,完成无人直升机卸载工作。
拖车从地面进舱将无人直升机装载到运输车方舱初始位置的过程为其出舱的逆过程,不再赘述。
4 结束语
某型无人直升机拖车装卸控制系统以通用PLC控制技术为平台,巧妙地将机体的装卸工作转化为步骤明确、轨迹固定的拖车运动和尾板运动,从根本上扭转了传统装卸过程中人力投入多、操作便捷性差、机体安全隐患大、人员人身安全受到威胁的局面。此外,该系统设计了故障实时诊断及处理的功能和互为冗余的自动、手动2种控制模式,使得装卸工作更加安全、可靠、便捷。仿真、测试结果表明,该系统实现了无人直升机装卸工作的机电化,达到了降低装卸工作风险,提高装卸工作效率的目的。
