组网雷达情形下的低角跟踪技术的设计和实现
2018-12-06李川
李川
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
雷达在跟踪低空目标时,由于在地面和在海面对电磁波反射,从观测目标返回的信号通过将不同路径到达雷达天线,使得雷达跟踪系统工作不稳定,产生所谓多径效应。由于多径效应,使雷达跟踪目标的精度降低,甚至造成跟踪失效。为了适应对现代对海对陆探测的需要,应该对低仰角高速目标跟踪测量的多径问题予以解决。
根据一般的舰载雷达统计,其跟踪低空目标的精度达到1~3mrad。当目标低空飞行时,雷达波束指向基本为零度,多径效应和地海杂波对雷达发现和跟踪低空目标的性能影响很大,导致无法发现目标或需要长时间搜索才能确定目标位置,跟踪精度差,无法给武器系统提高较高精度的目标参数,严重时导致目标丢失。
为了解决该问题,本文将在采用组网雷达方法的情形下,选取合适的策略和方法对低角跟踪技术的方法进行合理的设计和实现。
1 概述
雷达组网技术采用多部雷达的时频同步技术和融合技术,不仅可以提高雷达完成探测任务的可靠性,还可以提高测量精度。以探测精确性为目的,可利用单雷达低角跟踪的模型和处理思路,统一资源配置、管理和应用,用数据处理技术,实现多站雷达低角跟踪技术的目的[1]。
组网雷达在低空探测时,采用低空补盲的机理,对在较低空域中雷达看不到的区域由另一个雷达进行补充,达到共视的效果。另外可以借助数据融合的方法,达到对低空目标多径效应的弥补。
2 低角跟踪影响因素和误差分析
2.1 外部条件影响因素
解决多平台雷达低空测角问题会一般受到以下因素的限制和影响:
(1)强表面杂波
要探测低空目标,雷达势必会接收到强地面/海面反射的背景杂波,将影响目标的定位和测距功能。
(2)地球曲率
地球是一个球体,直线传播的雷达电波只能在一定的视距范围内才能发现目标。
(3)地形多径效应
雷达电磁波的直射波、地面反射波和目标反射波的组合会产生多径干涉效应,导致仰角上波束分裂。而且,在低高度上,这种效应会导致目标回波按规律衰减[2]。
2.2 典型单脉冲雷达测角模型分析
根据从回波信号中提取的信息,分为幅度比较单脉冲(比幅)和相位比较单脉冲(比相)。比幅是通过比较2个相位中心重合但指向不同的波束得到目标角度信息;而比相则通过比较2个相位中心但指向相互平行的波束,得到目标角度信息。通过和差测角将2个指向不同的幅度和差单脉冲波束同时收到的信号进行和、差幅度处理,进而处理角误差信号的幅度可以达到误差消减的作用。
当目标掠海飞行时,反射波主要来自主波束的海面反射,反射波与直射波进行矢量合成。由于反射波与直射波的路径差及海面引入的相角,使反射波相对于直射波产生一个相移,这就造成了矢量合成的结果使角误差信号失真,不能真实反映雷达天线指向偏差,影响目标跟踪[3]。
单雷达中多路径效应的主要影响表现在仰角坐标中,根据信号衰落的严重程度和造成的角度误差,有如下范围产生:
(1)主瓣反射范围,即表面反射出现在主瓣的一侧并且在此处衰落是中等的。
(2)旁瓣反射范围,即主波束不照射到表面且反射只进入波瓣的旁瓣。
(3)水平范围,即目标及镜像靠近得足以使天线增益几乎完全加到目标及其镜像,而且反射完全可以对消掉直射信号[4]。
对于低仰角目标,误差表现为反射体目标的闪烁误差。以比幅法为例,在多径条件下,对于直达信号而言,如果差信号dΔ和和信号dΣ同向,那么对于多径反射信号,差信号iΔ一定与和信号iΣ反相,信号矢量关系如图1所示。

图1 和差信号矢量关系
根据平行四边形法则,多径条件下差信号Δ和和信号Σ输出不再保持同向或者反向关系,即:

式中,VΣ,VΔ分别表示和波束接收电压、差波束接收电压;表示复反射系数。

式中,dθ为目标的仰角。当1ρ=-时,发生理想镜面反射时,单脉冲比为无穷大,会造成巨大的角估计误差。
2.3 组网雷达误差来源分析
(1)鉴于目前的对空多功能雷达探测距离很远,有效探测仰角很高,因此不能统一采取平面模型进行探测,需要在目标较远较高情形下采取近似平面反射或者球面反射模型,以保障对仰角误差数值的精确性。因为常用雷达的架高均不是很高,可以采取近似平面反射的模型,根据平面反射模型的相关计算,其路径差可以表示为:

其中,hR为雷达架高,hT为目标高度,Rd为雷达的探测距离,在目标无远时约等于水平距离,RE为地球的等效半径,约为地球地理半径的4/3倍。
通过距离差可以求得相位差,同时考虑两型雷达各个频点上相位的不同。下文设计的仿真试验采取平面反射模型、近似平面反射模型进行和球形模型相结合的方式。
(2)组网雷达系统为了计算仰角误差数值的精确性和独立性,在模型构建过程中暂不考虑雷达对目标跟踪由跟踪产生的固有的系统误差和随机误差,也不考虑雷达产生的坐标转换误差,仅考虑由于多径产生的俯仰误差。
(3)基于低角跟踪引起的误差,主要与传感器的高度、目标的高度、传感器的频率范围、相位有关。
对于组网雷达系统而言,传感器的数目、相对间距都可以成为改变组网雷达低角跟踪的效能的手段。
3 组网雷达模型设计
下文模型以单雷达单脉冲的低角跟踪模型的建立为基础;通过多阵面或者多点频的雷达信息处理的过程,推出一般条件下的单雷达工作状态的低角跟踪模型;最后通过设定特定场景和特定作战任务,推出多雷达组网条件下,以目标精度最优为目的的组网雷达低角跟踪模型。
3.1 单雷达固定频点模型建立
3.1.1 理想平面反射模型
当雷达和目标高度均较低时,并且雷达探测距离较近的时候,采取该模型。
设雷达高度为hR,目标高度为hT,水平距离为G,根据下图所示的几何关系,可得雷达信号的直达路程和反射路径长度分别为:

因此,直达与多径路程差为:

然后根据路径差求相位差,求单脉冲比值,最后得到低角俯仰误差。
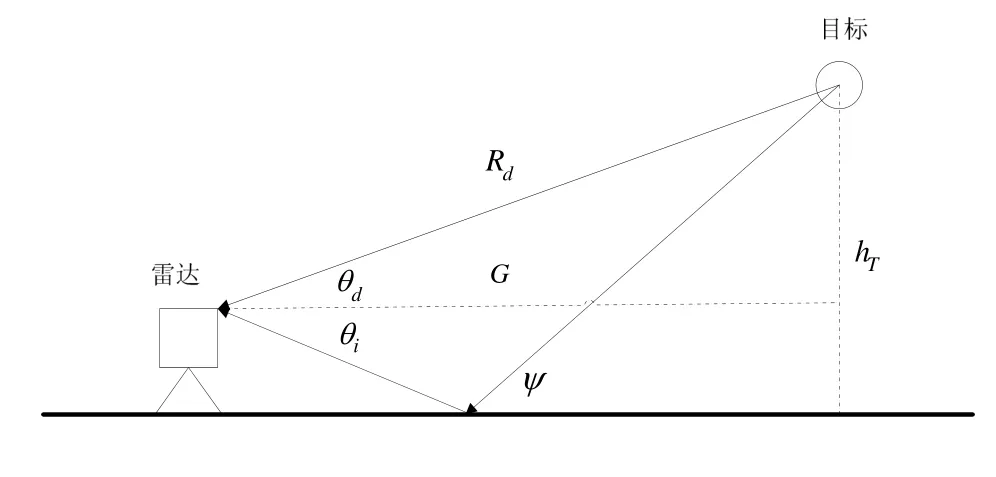
图2 理想平面反射模型
3.1.2 近似平面反射模型
当雷达高度较低,目标高度较高,并且探测距离较远时,采用该模型。
则直达与多径路程差为:

其中,雷达高度为hR,目标高度为hT,水平距离为G,地球等效半径为RE,探测距离为Rd。

图3 近似平面反射模型
然后根据路径差求相位差,求单脉冲比值,最后得到低角俯仰误差。
3.1.3 球面反射模型
当雷达高度较高,目标高度较高,并且探测距离较远时,采用该模型。
雷达信号的直达路径和反射路径的距离差为:

利用三角和几何知识,可以推导出:

然后根据路径差求相位差,求单脉冲比值,最后得到低角俯仰误差[5]。

图4 球面反射模型
3.2 单雷达工作状态下模型对消方法
主要考虑单雷达时域和频域的变化。脉冲重复周期可使系统的分选识别难度增加。雷达工作时,频率周期跳变,变化量也非常大。单脉冲雷达存在若干个频点,将每个频点按照3.1所述方法构建不同的误差模型;而当具备两个阵面搜索跟踪的雷达时,存在分阵面捷变频对目标进行处理的问题。两部雷达处理的流程如图5所示。
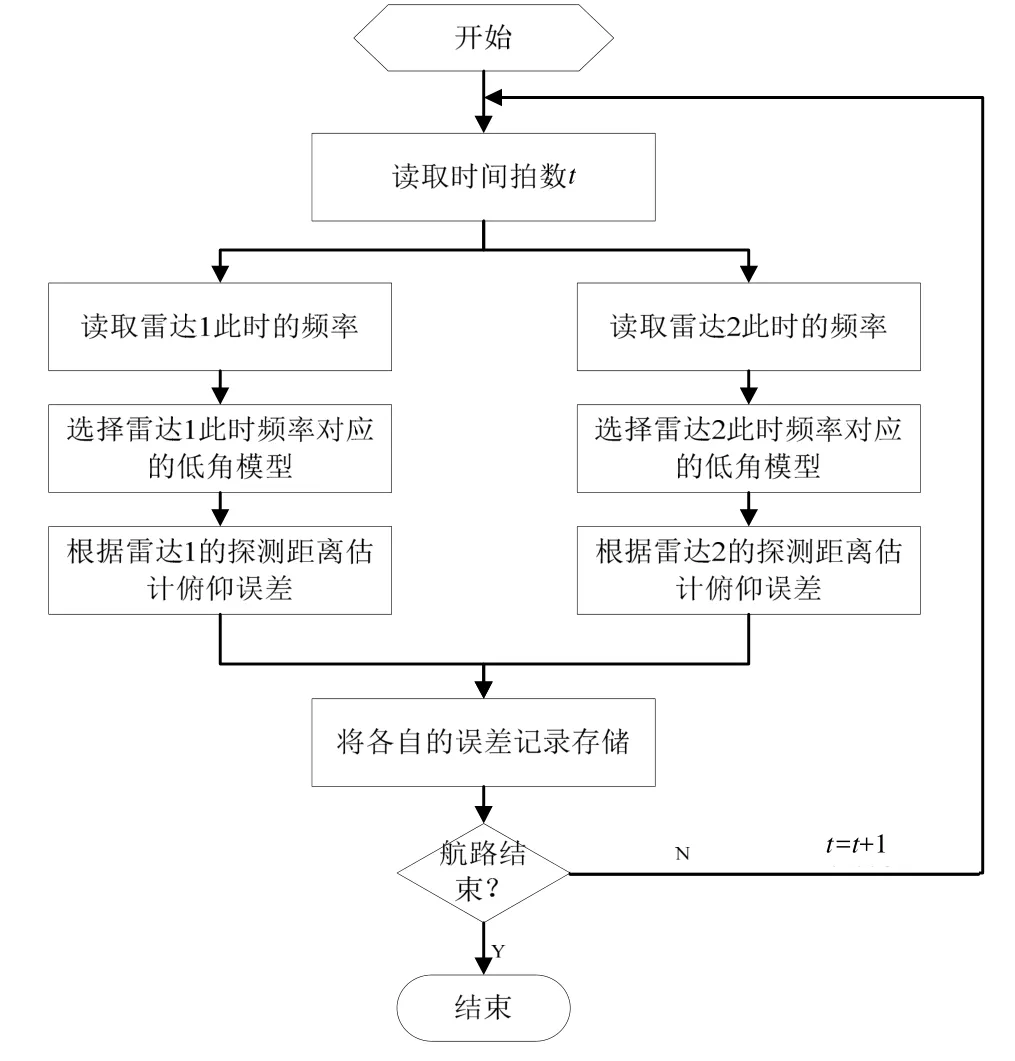
图5 低角跟踪模型构建流程
接着考虑组网雷达的误差对消问题。当两个平台的雷达的误差同向时,将较小的误差逆向,与较大的误差进行对消,消减该拍的误差;当两个平台的雷达的误差逆向时,直接将两个平台的误差相加,以达到消减该时刻误差的功能[6]。流程如图6所示。
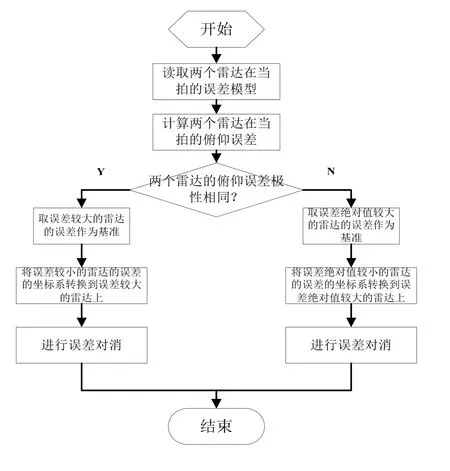
图6 低角跟踪模型对消流程
3.3 组网雷达情形低角跟踪模型算法设计
根据以上分析,我们采取的算法和策略的流程如下:
(1)首先通过雷达的比相法和比幅法,预估出单雷达的低角跟踪模型,参数为雷达的常用的架高和目标的架高,雷达的径向相位差等值,以常用的模型做一个仿真,仿真结果如图7所示。

图7 常用雷达误差模型构建示意图
可以看到,两个雷达由于在架高、载频、波束宽度、探测范围等参数的不一致,导致其在探测区间内的角度误差主要是俯仰误差存在不一致的情形。
(2)将两个雷达在距离上的误差通过关联和滤波形成一条统一的距离误差曲线,仿真结果如图8所示。
本仿真图是建立在两个不同雷达在一个位置的情形,可以看出,雷达在俯仰上的误差和与目标的距离有着。另外,抗多径效应还和雷达的布站有一定关系。
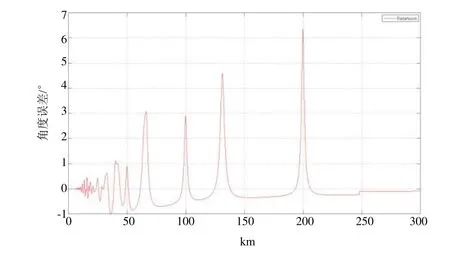
图8 组网雷达融合误差模型构建示意图
若结合两个雷达的实际位置关系,可以在理论上得到最优的抗低角多路效应的结果。
(3)结合数据融合算法,这里采用EKF算法和 UKF算法比较的方式,对所产生的误差进行修正,并使其误差转移到雷达量测的方位、俯仰、距离坐标轴上。
图9总结上述流程。
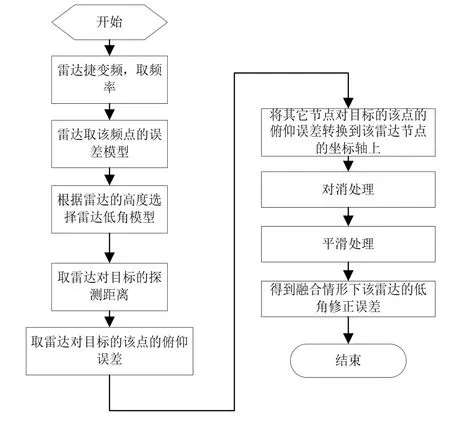
图9 组网雷达低角跟踪仿真流程
4 模型仿真和试验结果
4.1 两个不同雷达点频情形时的误差模型
假定雷达1和雷达2(不同种类)的位置重合。雷达1选取四个点频(3.1GHz,3.2GHz,3.3GHz,3.4GHz),雷达 2选取(2.1GHz,2.2GHz,4.2GHz,4.3GHz),分别取目标高度为3m,15m,100m。按照上述流程,误差模型如下所示:

图10 目标3m的两部雷达频点低角模型

图11 目标15m的两部雷达频点低角模型
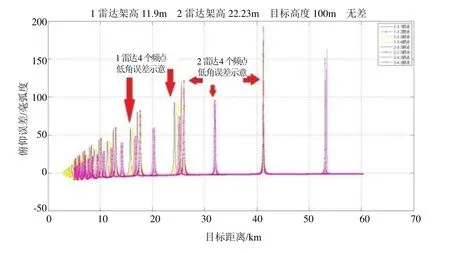
图12 目标100m的两部雷达频点低角模型
4.2 两个不同雷达正常工作时的误差模型
仿真条件同4.1,分别取目标高度为3m,15m,100m。按照上述流程,误差模型如下所示:
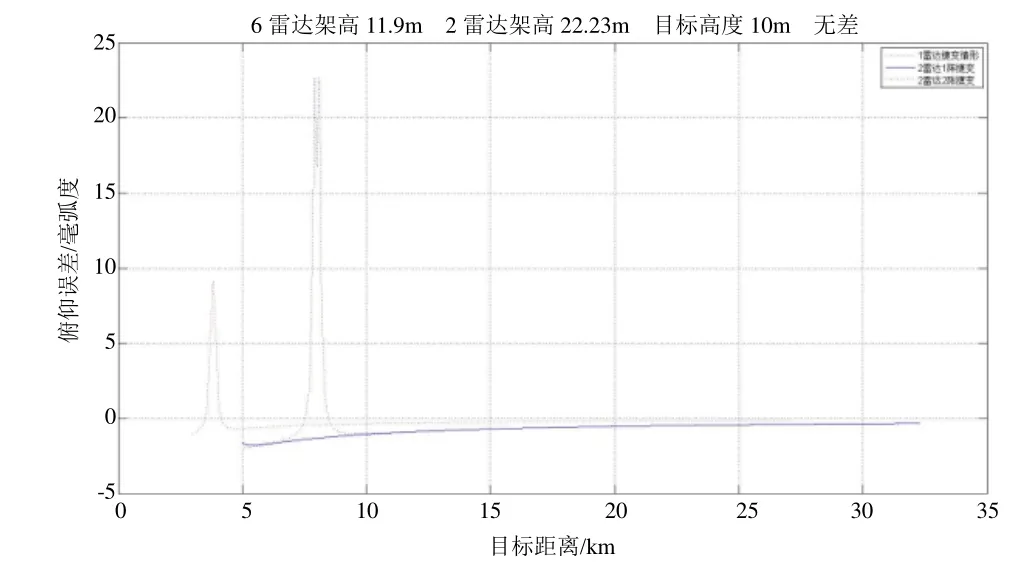
图14 目标10m的两型雷达频点低角模型
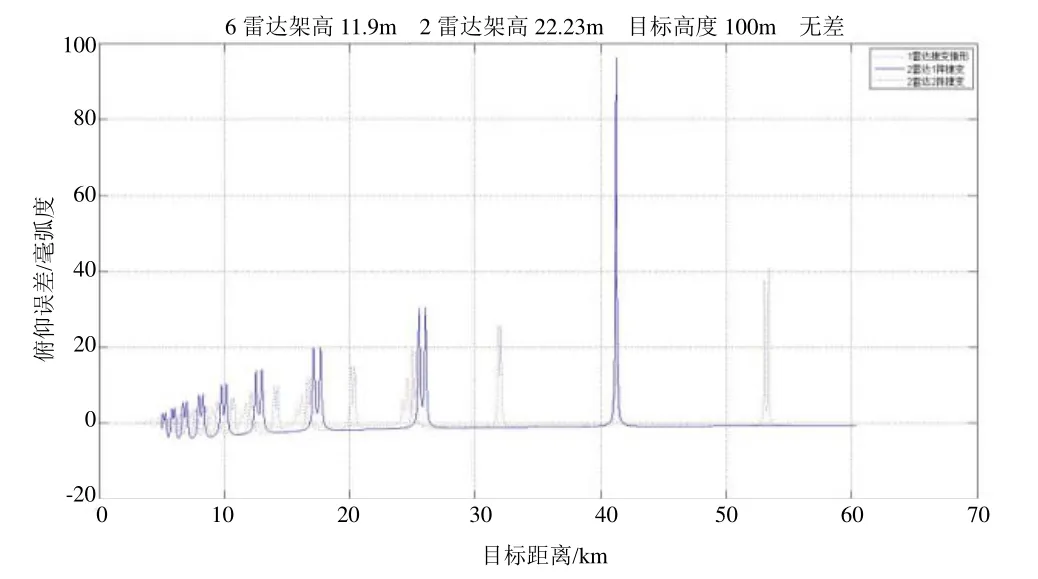
图15 目标100m的两型雷达频点低角模型

图16 仿真目标和平台的位置和运动方向

表1 两个平台相距3km的统计

表2 两个平台相距15km的统计
4.3 组网雷达低角误差模型算法应用分析
以两个平台相距 3km、15km为例,目标高度分别为 1000km,100km,10km。两个平台与目标不同向,相对位置如图16所示。
平台和目标按现有航向运行270s,下边是全时段由低角产生的俯仰跟踪误差的情况,并采取数据融合(算法为EKF滤波+多假设关联)情形下,误差分析分时段统计单位(度:均值/均方根)如表1和表2所示。
5 结论
从误差建立和误差消除两个方面来做计算结果分析。误差模型是建立在不同的雷达数目、平台间距、目标高度以及平台雷达频率之间的相对关系。用一个数学表达式可以表示为:
其中,daz表示俯仰误差,k为相对的参数,num表示雷达数量,d表示雷达间的间距,h表示雷达探测目标的高度,f表示雷达拥有的频点数。
通过上述仿真分析可以得出如下结论:
(1)参与组网的雷达数目越多,越有益降低雷达的低角俯仰偏差。
(2)雷达探测的目标越高,多雷达探测的俯仰偏差得益越明显。
(3)参与组网的雷达的点频数目越多,越有益于降低雷达的低角俯仰偏差。
(4)参与雷达组网的雷达间间距,可以通过探测目标相对距离的变化有效地控制某一时段的雷达低角跟踪误差。
从仿真结果可以看出,雷达对于目标的低角跟踪误差在中远距离影响很小,但是也可以根据相应的误差修正算法进行有效的消除。采取修正算法不能从根本上消除多径误差带来的影响,但能产生一定的抑制,尤其随着目标高度的提升,所产生的效果越好。