多站扩频测距下的卫星定位GDOP分析
2018-12-06李强梁文洁张国云刘双全王向涛
李强,梁文洁,张国云,刘双全,王向涛
(航天器在轨故障诊断与维修重点实验室,西安 710043)
0 引言
在GPS系统中,星座卫星的位置和卫星发射信号的时间均是已知,用户接收机通过接收4颗卫星的信号,利用三球交汇原理实现用户三维位置的解算[1],同时还可以解算出用户接收机的时钟误差。如果用户接收机的可见GPS卫星数目多于4颗,则可以利用冗余数据进一步提高定位精度[2]。文献 3分析了一维直线阵列在站间基线长度不相等时的测距和测向误差特性,认为不等距布站可以降低目标的测距测量误差,但一维布站的实际应用场合相对较少。文献4考虑了GPS信号中断下的机器人定位问题,提出采用GPS与测距法融合技术提高定位精度,其结果仅针对机器人二维平面运动。文献 5研究了一种基于惯性系统和激光测距仪的组合定位技术,将测量设备放在调平转位机构之上,得到的测量误差较为稳定,定位精度较高。文献6提出了一种通过目标角度和角度变化率信息对观测站与目标间的距离进行解算的快速定位方法,但是需要高精度的角度测量信息支持。文献7针对相对定位问题,提出将飞行体惯导信息与相对距离测量信息相结合,实现两飞行体间精确动态相对定位。文献8从遥感与测绘领域定位技术出发,分析了全球定位系统、姿态测量(惯性导航系统)和激光扫描测距集成下的直接空对地定位系统的精确定位方程,并进行了误差源对定位精度的影响。文献9在卫星信号质量较差导致无法通过观测方程求解模糊度时,提出一种利用惯性信息辅助解算模糊度的方法,实现两运动载体之间精确动态相对定位。文献 10将测速信息、传播延时和时钟误差纳入测距模型,推导星间测距位置与时间的解耦模型,提出利用 GPS辅助测量来定星座的位置基准和时间基准,可有效克服星座的整体旋转。从以上研究可以看出,提高精度一直是导航与定位的研究热点。而随着地面网络应用的普及与发展,利用网络进行定位的研究也逐渐增多。文献 11即是利用算法改进来提高室内定位解算精度的例子。
在卫星测控中,提高地面测距精度有助于提高轨道确定精度 ,而多站同时测距同样有助于提高轨道确定精度。在当前扩频测控体制下,可利用地面多站同时测距来提高卫星位置确定精度。针对这一问题,这里重点讨论多站同时测距下的GDOP参数变化情况。
在地面选取多个测量站,可以进行测量站与飞行器间的距离测量。如果测量站的位置精确已知,则在多站共视飞行器的条件下,能够进一步进行飞行器空间位置的解算。一般情况下,地面测量站的时钟精度比较高,定位中可以不必考虑其误差影响;对于飞行器,在其时钟精度足够高的情况下,最少需要三个测量站才能对飞行器进行定位。
1 三站定位解算
先考虑三站定位。如图1所示,假设地面有三个站A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3),其中一个站A对卫星发射信号,三个站都接收来自卫星的转发信号。如果三个站的坐标已知,且各站能够准确测得信号传输时延,则由三球交汇原理,可以解算出卫星的空间位置S(x,y,z):

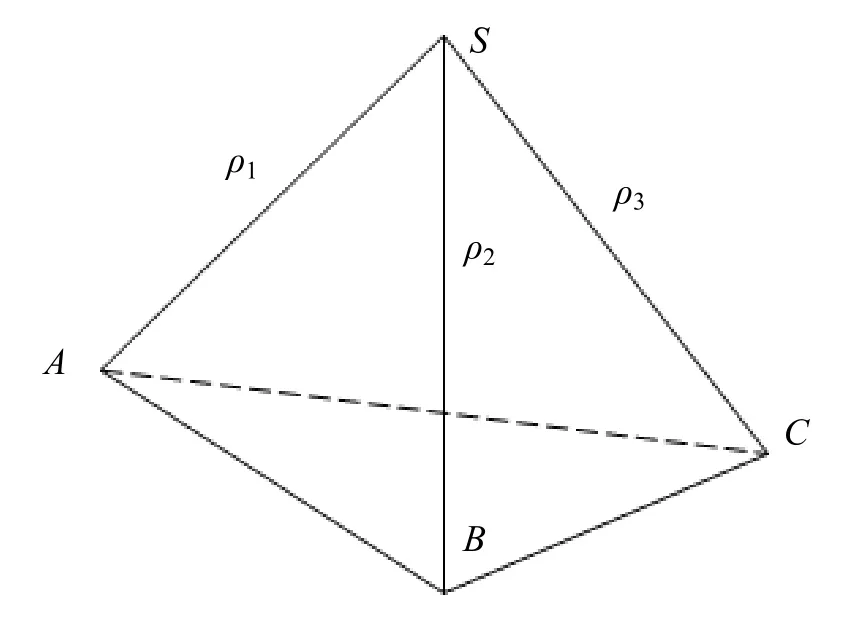
图1 三站定位
若卫星在空间位置的估计值为S(x0,y0,z0),利用Taylor公式,有:

则式(4)可以写为:

实际上,式(5)中的系数为方向余弦,即:

将式(5)用矩阵表示为:

对于式(7),其解为:

求得dx后,利用S(x0,y0,z0)可以求出卫星位置S(x,y,z)。应该注意的是,估值S(x0,y0,z0)可能偏差较大,因此一般需要迭代几次,最后求解得到位置解[2]。
2 GDOP分析
下面分析定位误差与距离测量误差[12]之间的关系。假定所有的距离测量误差都相互独立且有相同方差σ2。则根据式(8),有:

式(9)中的cov(x)为定位误差协方差矩阵,可以将其进一步写为:

因此,定位误差为:

其中,aii为矩阵(GTG)-1的对角线元素,tr(A)表示矩阵A的迹(trace)。式(11)明确给出定位误差与距离测量误差的关系,定义几何衰减因子(Geometric Dilution Of Precision,GDOP)为:

从式(12)可以知道,在距离测量误差σ不变的情况下,如果GDOP越大则定位误差越大,GDOP具有误差放大的作用。对于矩阵G:矩阵中的每一行都是一个单位向量,向量的方向由地面站指向卫星。可以用单位球来表示G中的各个向量:

图2 单位球上的G矩阵
在图2中,坐标系的原点为卫星所在的S点。显然,四面体SABC的体积VSABC与G矩阵的行列式|G|有直接关系:行列式|G|的绝对值等于四面体体积VSABC的6倍。当行列式|G|=0时,说明卫星S与三个测站在同一平面上,这种情况下,肯定是不满足定位的(这时卫星不是三站共视),即三站共视卫星时肯定满足|G|≠0。这样
式(13)中gij为(GTG)-1矩阵中的各元素。式(13)说明,|G|越大则tr(GTG)-1越小,GDOP也越小。当A、B、C三站呈正三角形分布时,四面体体积最大,对应的|G|最大。因此,测站布局越接近于正多边形,GDOP越小。
当|G|≠0 时,tr(GTG)-1=tr(GGT)-1,所以:

式(14)中bij为GGT的对角线元素,显然,GGT为正定矩阵。根据正定矩阵与其逆矩阵间的关系,有:
式(15)的意义在于给出三站定位情况下的GDOP理论下限值,约为1.732。
3 GDOP计算结果
文献13针对不同导航星座进行了GDOP研究,认为GDOP随卫星数目增加单调递减,但递减幅度变小;卫星对GDOP贡献越大,其故障产生的定位误差越大;使用加权GDOP可有效的减小定位误差。文献14研究了一种使用4颗导航卫星定位时的高效计算GDOP的算法。文献15对典型四基站三维无源定位系统的GDOP进行了研究,认为在以球体作为几何参考体的情况下,GDOP沿径向向外时会不断增大、而在基站点处出现间断点。这里用仿真给出GDOP计算结果,仿真主要针对测站为正三角形布局的情形来进行。
假定三个测站间的地心夹角为 θ,显然有0°<θ≤120°。对于θ=120°的极端情况不作考虑,因为这时如果能三站共视卫星,则卫星应在无穷远处。因此,对于θ接近于120°的情况,卫星的高度也会远大于同步轨道高度。在三站为正三角形的情况下,假定卫星在三个站的正上方,地面高度为h,这里h取值范围为0 km <h≤20000km,步进量为10km。另外,仿真中对于卫星的共视,测站仰角在0°以上即可。
图3为θ取5°,10°,15°时的GDOP分布。当θ=5°时,最佳定位点在 200km 高度附近,但这时GDOP随着高度变化剧烈,不宜应用;当θ=10°时,最佳定位点在400km高度附近,GDOP变化明显缓慢,能够应用;当θ=15°时,最佳定位点在 600km高度附近,GDOP变化平缓,适于低轨卫星应用。

图3 θ取5°,10°,15°时的GDOP分布
图4为θ取25°,30°,35°时的GDOP分布。这时的最佳定位点相应移到1000km高度。而在低端500km高度附近,GDOP值在2以下,效果还是不错的。
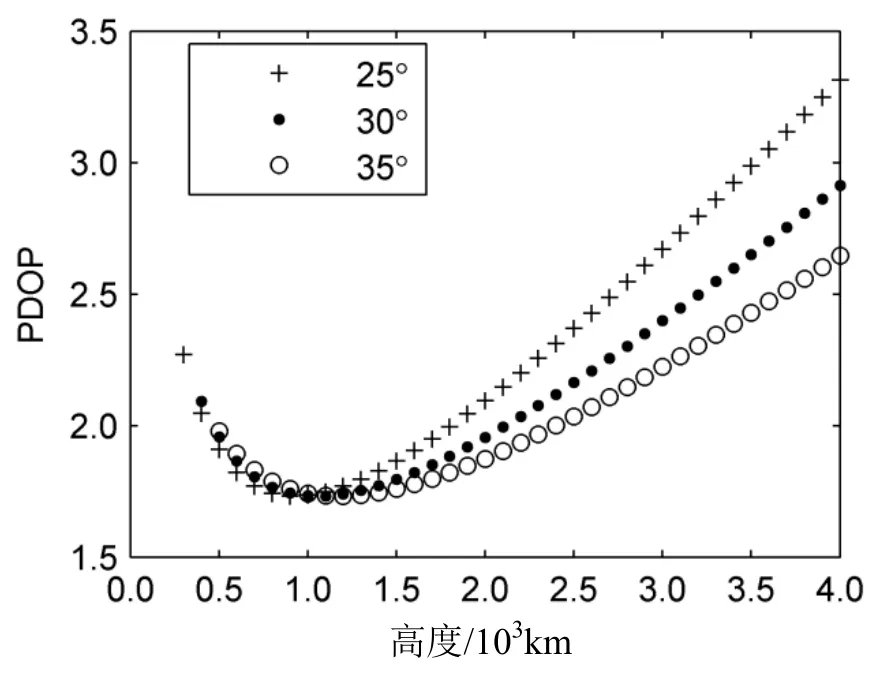
图4 θ取25°,30°,35°时的GDOP分布
图5为θ取55°,60°,65°时的GDOP分布。当θ=55°时,最佳定位点在 1000km 高度附近。有一点需要说明的是:θ<60°时,GDOP的理论最小值(约为 1.732)还是可以得到的,GDOP在最佳定位点两侧呈V形分布;一旦θ>60°,GDOP的理论最小值将不可得,因为各站距离加大需要卫星高度更高才能三站共视,卫星处在理论最佳点时三站不能共视卫星。

图5 θ取55°,60°,65°时的GDOP分布
图6为θ取85°,90°,95°时的GDOP分布。这时θ每增加1°,卫星共视高度都会增加很多,如图中θ每增加5°,对应高度增加约1000km。虽然高度变化较大,但是GDOP值的变化却更趋于平缓。

图6 θ取85°,90°,95°时的GDOP分布
图7为θ取105°,110°时的GDOP分布,这时的卫星共视高度变化更快。可以看出,θ为115°时的GDOP值根本没在图中出现,原因就是这时的共视高度已经超过20000km。另外,GDOP值变化更平缓,虽然其数值在由3向4增加,但在这个高度上也只有它最优。
从文献13对GPS、GLONASS、Galileo导航星座的GDOP分析来看,即使3个星座卫星尽最大可能都是可见、可用,出现GDOP数值小于2的情形与时机都是相对较少的。因此,这里的最佳值也仅仅是理论结果,实际的情况应该还要大一些。
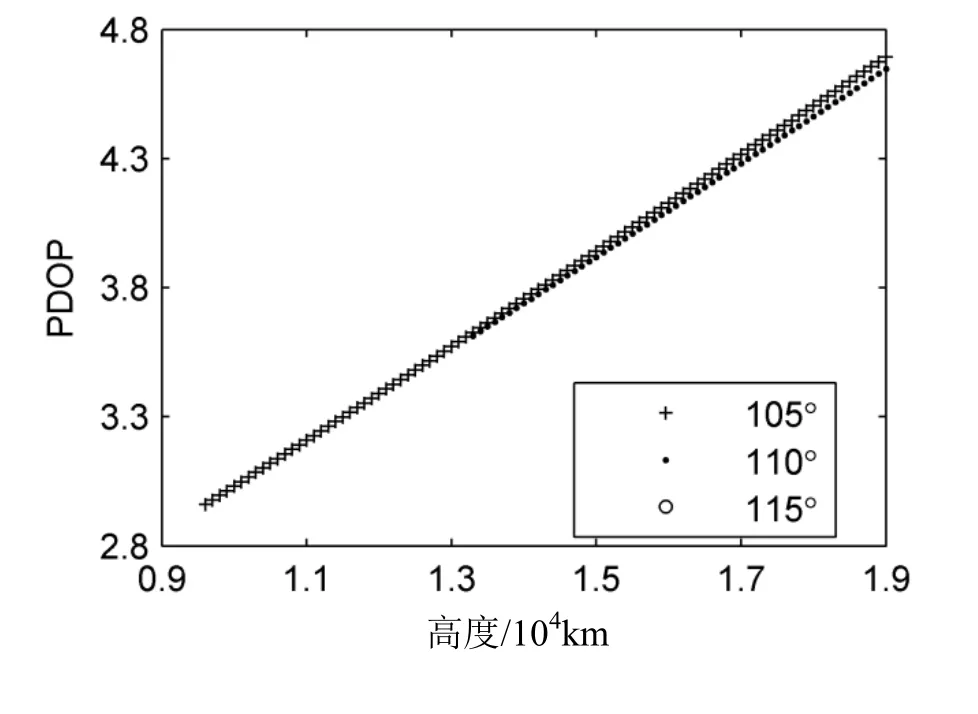
图7 θ取105°,110°时的GDOP分布
整体而言,当θ较小时(此时站间距离较近),GDOP值在低轨端较低,适于定位,随着轨道高度增加,GDOP迅速变差;随着θ变大,GDOP值能够迅速下降,但是能够定位的卫星轨道高度也增加,这时更适于中高轨卫星定位。
4 结论
在多站测距定位基础上对GDOP进行分析,给出其理论最小值 1.732。仿真与分析表明,对于近地卫星,三站几何布局应接近于正三角形,同时站间地心角应在 30°~60°之间,这样定位误差较小;但对于高轨卫星,虽然这时的GDOP值都比1.732大,但测站间地心角还是应该增加才行。
下一步的工作是进行更全面的立体仿真,给出完整的GDOP分布;另外再考虑星钟误差,推导新的GDOP理论值。