基于动态无功补偿装置的控制策略研究
2018-12-03张乐世杜慧杰
张乐世,杜慧杰
(1.国网山西省电力公司电力科学研究院,山西 太原 030001;2.山西世纪中试电力科学技术有限公司,山西 太原 030001)
0 引言
作为国民经济和社会发展的重要基础产业,电力安全是确保人民群众生命财产安全以及影响经济发展的大事,是构建社会主义和谐社会的重要内容。近年来,风能、太阳能发电等新能源在电力能源中所占比例大幅上升;而其特点是分布广、位于电网末端。而规模较大、数量较多的非线性负荷接入引起电网的功率因数下降,电网电压波动及闪变,电流产生谐波及畸变等等,对公用电网电能质量产生了严重污染,影响了电网的可靠运行。另一方面随着现代科技的进步,一些用户设备则对电能质量的要求越来越高,电能质量的下降将对人民的生产生活造成巨大的损失,所以对电能质量进行监控和治理具有重大的意义,同时也是近年来电力领域研究的热点。
无功功率是电能质量控制的重要标准,在电气设备中建立和维持电磁场,完成电磁能量的相互转换[1]中起到了重要作用,与电力系统能否安全稳定运行密切相关。因此无功补偿领域中控制策略的研究已经成为许多国家重点研究的内容[2-3]。
1 SVG(动态无功补偿装置)装置的典型应用
1.1 输电系统枢纽变电站
目前,新能源的大力发展使得其发电量在电网内的比重日益增长,但由于新能源分布的不均匀性,必须进行跨区域远距离电力传输,在此输电过程中,能量的损耗极高,导致了电力传输效率降低。可以在远距离输电线路的中点位置安装SVG装置,由此来提高系统的输电性能。
1.2 配电网负荷中心变电站
在区域配电网中,负荷的变化一般较为迅速。与此相对的,变压器空载及轻载的时间较长,导致变压器功率因数低,损耗大;当变电站全部为电缆进出线时,可能出现负荷较轻时电缆充电无功倒送问题;尤其空调等电动机负荷增长很快,可以通过SVG来解决动态电压支撑问题。
1.3 新能源发电
风能资源具有不确定性的特点,加上风电机组运行特性,会导致风机输出功率不稳定,引起并网点功率因数质量下降、电压波动甚至造成闪变等问题,在目前的光伏发电领域,也存在系统电压波动等问题。SVG可以在某种程度上解决这些问题,提高电能质量。
1.4 煤炭、冶金行业
在煤炭或冶金行业内,大量使用冲击性负荷和变频控制负荷,这类负荷在工作过程中会对电力系统造成无功冲击,从而引发电能质量问题。如电压波动及闪变、功率因数低、谐波含量超标、电力系统三相不平衡等,对电网造成一定的影响,并且危及负荷自身,导致生产效率低下,减少设备使用寿命。SVG能够实时跟踪负荷变化提供相应的无功补偿,改善负荷接入端无功波动。
1.5 城市轨道交通
城市交通系统供电采用的是电缆线路,其负荷功率与行车密度密切相关。在白天,处于列车高峰时段,无功功率不足,而当夜间列车停运时,无功功率过剩,由此造成供电网功率因数低,存在利率调整电费罚单情况。SVG已作为电能质量治理产品广泛应用于城市轨道交通供电系统内。
2 SVG控制策略
2.1 电压无功综合控制
电压无功综合控制策略是母线电压在遭受负荷的扰动后仍然可以维持电压稳定的需求。图1为电压无功控制模式下的控制策略,其中UT为负荷点附近的等效母线PCC电压,I*q为无功电流参考指令,Uref为被控母线的参考电压。
在电压控制模式下,将被控母线的PCC电压作为控制的唯一目标,当SVG装置接入点的母线电压位于电压合格区间范围内时,保持无功出力不变,控制均以三相母线线电压均值进行实时反馈调节。电压不合格是指电压合格区间以外区域,如图2所示,无功补偿设备输出相应感性或容性无功控制电压,电压低于下限时输出容性无功,电压高于上限时输出感性无功。
实际运行时,选择恒电压模式,不能使系统无功目标控制,即无论电压处于何区域(滞环内除外),均仅控目标点电压。
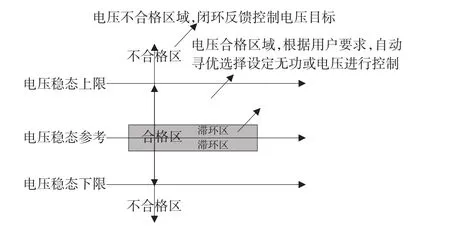
图2 电压控制策略
SVG控制策略流程图如图3所示。
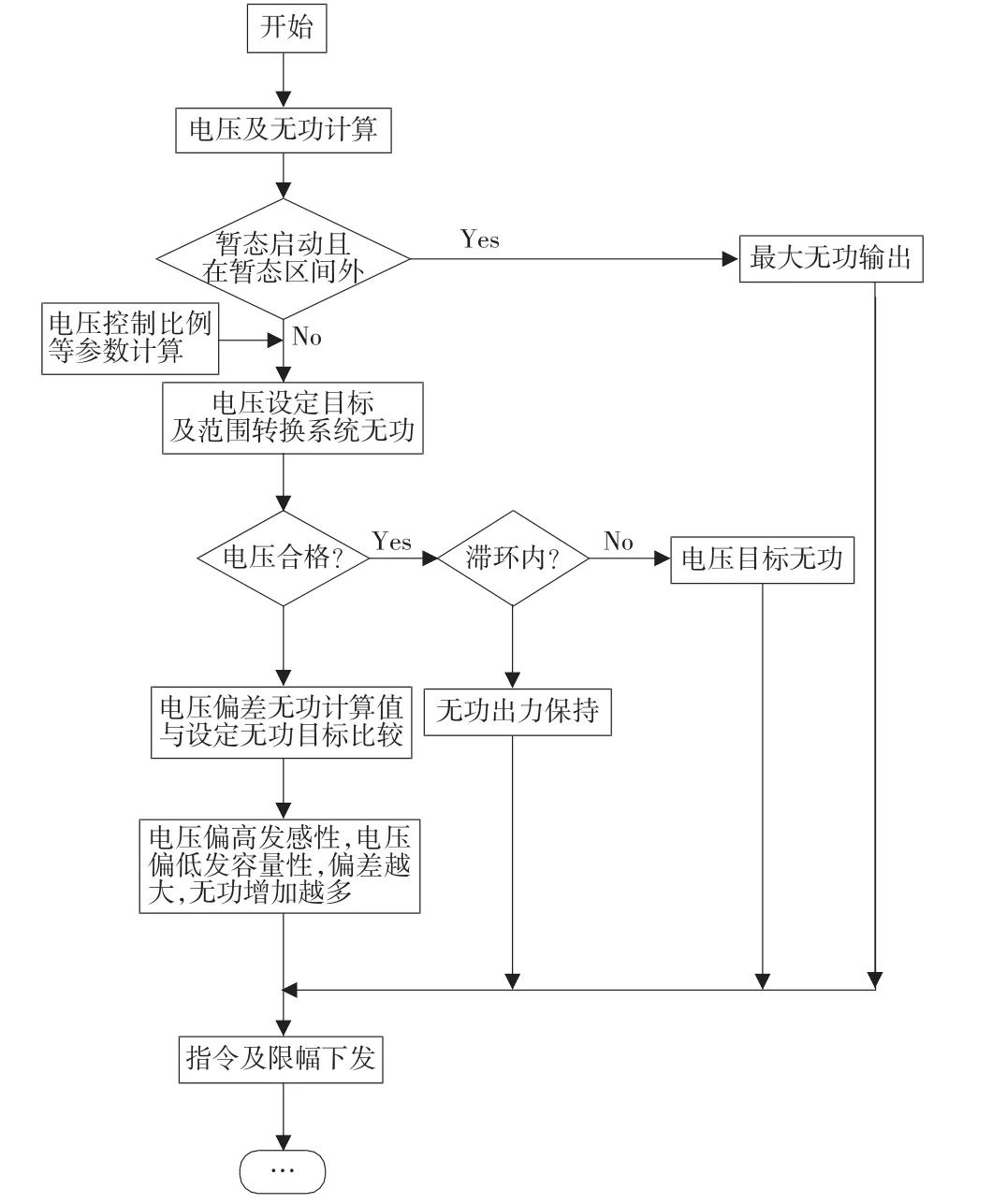
图3 SVG控制策略流程图
2.2 恒无功控制
SVG是通过改变输出电压来调节输出电流的,可以把SVG看作可控的电流源,在一定范围内输出电流不随电压的变化而变化。

图4 线路电压降落等效图
根据线路电压关系,得出系统压降与系统无功功率的关系,当Q为感性时,随着Q的增大,系统压降增大,电网电压降低;当Q为容性时,随着Q的增大,系统压降负向增大,电网电压上升。SVG工作于恒无功运行方式时,其工作特性如图5所示。

图5 SVG恒无功运行工作特性
恒无功控制模式,在设备试运行阶段、阶跃性测试场合应用较多,需要手动下发无功指令给SVG设备;在后台或者AVC下发控制指令的情况下,SVG接收AVC下发或者是VQC综合控制策略下发的无功指令,使得设备按指令输出无功。
2.3 恒功率因数控制
该方式用于将系统的功率因数控制在一定范围的场合,装置以系统的功率因数稳定在用户设定值为目标,调节装置的无功输出。根据生成的装置无功指令,除以当前电压得到电流指令,属于自动控制模式。通过引入PI控制器,无功功率换算出的无功实际值和指令值的偏差经PI调节后,转换为参考无功电流I*q,实现恒定无功功率的控制,见图6。

图6 恒功率因数控制策略图
2.4 负荷补偿策略
运行于该方式时,装置通过检测负荷侧的电流自动调节电流输出,以提高负荷电流的电能质量。属于自动控制模式,见图7。

图7 负荷补偿策略图
3 暂态快速响应策略
为了满足负荷节点附近母线电压在遭受负荷扰动后仍然可以维持电压稳定的需求,可以通过调控SVG的无功变化来实现[4]。图8是一个常用的控制策略简化图,由SVG的数学模型可以将SVG理解为一个可控的电流源,它从系统吸收的无功电流iq参考值跟随电流设定的参考值Iq,ref进行整定变化,而Iq,ref由选择的控制规律所决定[5]。在如图8所示的SVG控制策略中,Iq,ref是直接控制输入和具体的PI控制的输出之和。

图8 SVG的常规控制策略示意图
在SVG的控制研究中,PI控制算法一直是常规的计算方法,将电压控制作为被控量有

式中,Kp、Ki分别为PI控制环节的比例和积分系数。由此可知,当SVG工作于线性稳态区域时,如果ΔUT=Uref-UT=0,即通过检测、分析得到的母线电压等于参考电压时,就获得了无差的调节效果。
当被控电压处于暂态下限时,SVG满发容性以提升电压值;当被控电压处于暂态上限时,SVG满发感性以降低电压。
4 关联协调控制策略
4.1 光纤并联控制
对于同一场站下配置的多种不同类型的无功补偿装置,均可接受AVC下发的电压指令或无功指令独立工作,同一厂家的设备可以通过光纤并联通信实现协调控制,不同厂家的设备只有通过AVC下发无功指令才能实现协调控制。
协调控制系统的拓扑结构如图9所示,协调装置接收综自后台下发的电压目标指令,协调装置作为主控制器,计算并下发各并联装置的无功出力,通过光纤并联给各台SVG下发无功指令,具有很好的协调控制能力。因为光纤通信速度比常规的串口通信速度快,较好地满足了SVG对电压实时性的要求。

图9 协调控制器拓扑结构
根据式(2) 计算每台SVG的无功分配系数Ki

式(2) 中,QiN为每台SVG的额定容量,m为协调控制SVG的总台数。
设Qref为系统总无功指令,则Qref的上限为协调控制SVG的总额定容量,如式(3) 所示,其中Q为系统所需总无功。

每台SVG分配的无功出力如式(4) 所示。

4.2 VQC(电压无功控制装置) 协调控制
为实现站级多母线和多种补偿装置(SVG、电容、电抗)的协调控制,解决各段SVG及其他补偿装置容量差异及考核点不一致的问题,需要采用VQC控制策略。
现场VQC后台一般从SCADA系统取得电压、电流、功率因数等数据,经过计算和逻辑分析,对测控系统作出调节指令,综自测控系统将接到的指令执行,控制相应的一次设备。如有载调压变压器分接头和电容器、SVC、SVG等设备,将变电站的电压及无功功率控制在一个合格的范围内,从而达到电压无功控制的目的。
4.3 改进后控制策略的优势
相比于现有SVG控制策略,改进后的控制策略优点如下。
a)在电网电压补偿效果上有了进一步的优化,通过增加暂态快速响应策略,可以保障电网电压瞬变时SVG装置能够快速响应电压变化进行无功补偿,以维持电网电压的稳定。同时在现有SVG控制策略的基础上增加电压合格时控制系统无功的优化策略,在保证系统电压合格的情况下优化装置无功补偿效果。
b)对于同一场站配置的多种不同类型无功补偿装置,可接受AVC下发的电压指令独立工作。同一厂家的设备可以通过光纤并联通信实现协调控制,但不同厂家的设备现有控制策略只有通过AVC下发无功指令才能实现协调控制。改进后关联协调控制策略对无功补偿装置与AVC的通信接口、无功补偿装置间的光纤并联实时接口进行了研究,提出了一种适用于多套无功补偿装置间的主从协调控制方案,解决同一场站多套SVG装置无功出力不均衡甚至对冲的问题。
5 总结
本文主要研究了无功补偿装置常用的控制策略,分别从电压无功综合控制、恒无功控制、恒功率因数控制和负荷补偿控制几个方面对无功补偿装置的基本原理和控制方法进行了分析。另外,针对无功补偿装置运行可能存在的特殊工况,介绍了暂态时的控制策略,并详细介绍了协调控制及VQC后台控制的控制策略,多种控制策略共同保障无功补偿装置的平稳可靠运行。
