北斗卫星导航技术在遥控靶船上的应用
2018-11-29程天庆韩小钢
程天庆,韩小钢
北斗卫星导航技术在遥控靶船上的应用
程天庆,韩小钢
(海军大连舰艇学院,辽宁 116018)
我国自主研制的北斗卫星定位导航系统(BDS)特有的定位、短报文通信功能,该技术的应用为海军遥控靶船提供一种可靠性高、工作稳定的自动化控制方式,既可实现遥控靶船的精确定位、定向测量,也可实现运行数据的实时上传、遥控指令的下发,极大地提升了遥控靶船的工作性能。这对我国北斗卫星定位导航系统的发展和海军武器装备建设,具有积极的推动作用,同时对推动遥控靶船的标准化建设也具有十分重要的意义。
北斗 卫星定位 短报文通信 遥控靶船
0 引言
随着我国海军建设的迅猛发展,舰艇和武器装备数量激增,用于海军武器试验的靶船建设工作变得越来越重要。
我国的靶船建设经历了从固定靶船到遥控靶船的过程。早期为了测试海军武器的打击效能,在实弹演习时,主要使用固定靶船充当打击目标。如今,对靶船的要求越来越高,不仅能够高速行驶,还能释放电磁干扰、躲避雷达搜索、诱导来袭导弹偏离航向。我国海军主要将退役的舰艇通过改装后作为靶船使用,在靶船上安装各种传感器和自动控制设备,增强远程遥控能力,实现远程高度机动灵活的控制。
北斗卫星导航系统(BDS)是中国自行研制开发的区域性有源三维卫星定位与通信系统(CNSS),是继美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统,因其具有定位精度高、保密性能强和短报文通信的独有设计特点,北斗卫星导航系统成为国家战略新兴产业发展的重中之重。北斗卫星导航系统也越来越广泛应用于电力、建筑、测绘、水利、海洋、交通、应急救灾和公共安全等诸多领域。
北斗卫星导航技术应用在遥控靶船上,可以随时掌握靶船的位置信息,极大提高靶船的可操控性,提高武器装备的训练质量。
1 系统设计
1.1 总体设计
该靶船由退役舰艇改造而成。改造后,新增主控制器、人机触摸屏(HMI)、北斗卫星定位导航系统(BDS)、通讯控制器、主机控制器、舵机控制器、调距桨控制器等。总体结构示意图如图1所示。
主控制器核心单元为可编程控制器(简称PLC),PLC功能强大,可靠性高、应用灵活,在工业自动化控制,石油、机械、电力、军工方面均有广泛的应用。作为控制器的核心部件,PLC接收通讯控制器的数据,通过计算,解析相关协议及信息,发出控制指令。同时将靶船的运行及状态信息经由通讯控制器输送给指挥船。

图1 总体结构示意图
1.2 主动力装置结构
原设计主动力装置(主机)为双机、双轴、双桨布置,主机型号为8300ZC,四冲程中速大功率增压直接回行柴油机。柴油机通过艉轴直接驱动螺旋桨,无齿轮箱和离合器,同时配置了液压调距桨系统。根据该船主动力装置布置及结构特点,新增设计控制主机和调距桨的专用控制设备,即主机控制器和调距桨控制器。改造后,该船可以采用无人值守自动控制系统,由驾驶台主控制器发车令,操纵柴油机启动、停车及调速,同时操纵调距桨,从而控制船的前进、后退及航速。
1.3 主机(主动力装置)控制器设计
针对8300ZC主机的结构、配置和操控方式,其主机控制器主要由主机控制箱、执行机构、通讯控制器三大部分组成。
控制器是主机无线遥控系统的核心部分,系统所有的输入输出信号及其指令都由控制器内部的PLC进行处理。有2种操作模式,其一是有线模式,其二是无线遥控模式。
有线控制模式时,主机操纵人员通过控制箱上的人机触摸屏向控制器输入控制指令。控制器驱动执行机构,控制主机的调速,在人机触摸屏上可同步显示主机的运行状态。
无线遥控模式时,控制器通过通讯口与通讯控制器进行通信及命令接受,通讯控制器接受远程无线指挥中心命令,通过通讯线传给控制器指令信号,对主机进行控制。控制器将主机运行状态及时上传,远程遥控人员根据PC机遥控界面了解船的实际工作状况。
机旁操纵模式时,主机操作人员通过离合器取消遥控模式,可进行机旁人工操控主机。
执行机构采用结构紧凑的电动机—蜗杆减速器—手动离合器—传动机构。主机控制器结构如图2所示。
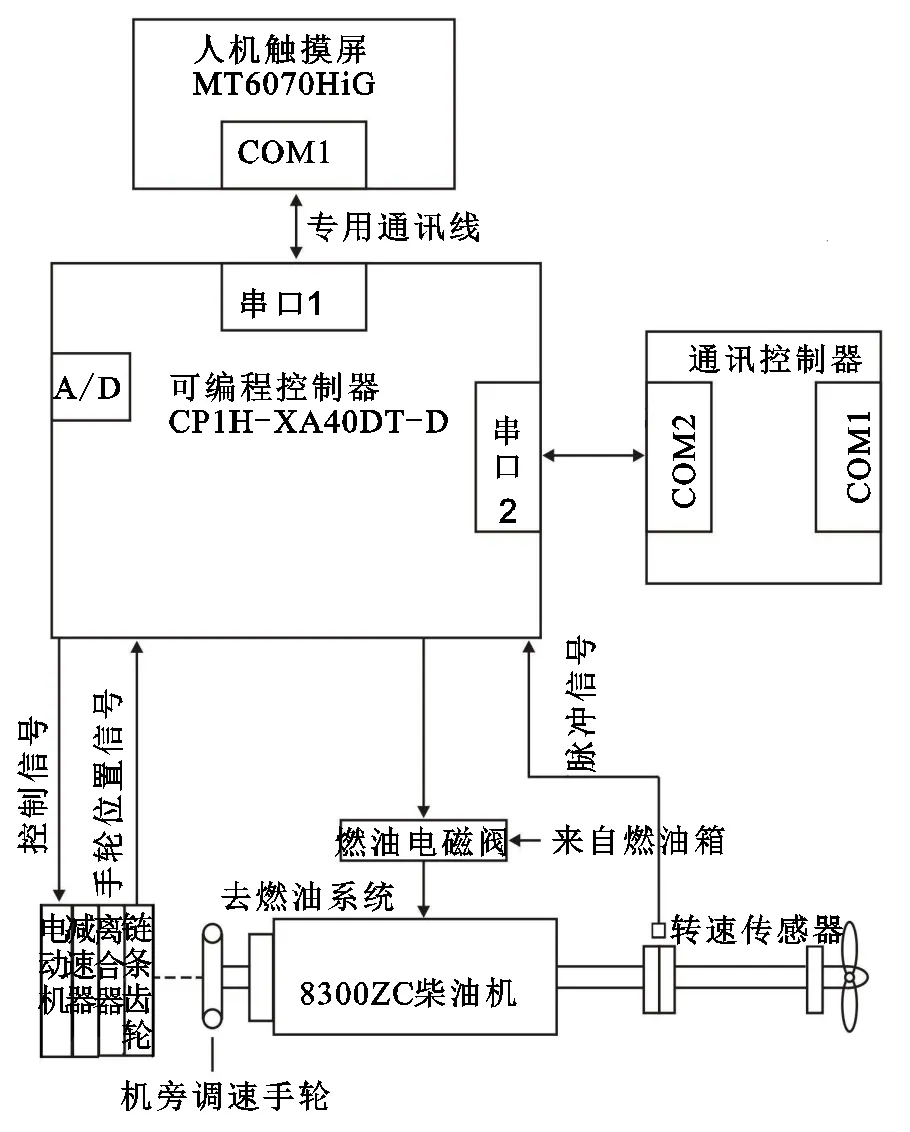
图2 主机控制器工作示意图
1.4 舵机控制器设计
为了实现遥控靶船远程转向的功能,根据电动液压舵机工作原理及结构,需要设计一套舵机控制器,该控制器的主要功能如下:
1)接收主控制器发来的舵角指令;
2)控制舵机按指令转舵(左30度~0~右30度);
3)将实际舵角上传给主控制器;
4)在失联条件控制舵机转舵“0”度(保护状态一),或左满舵(保护状态二);
5)手动/遥控转换方便迅速;
6)运行可靠,操作方便。
舵机控制器主要由可编程控制器(PLC)、人机触摸屏(HMI)和驱动电路组成,舵机控制原理示意图如图3所示,舵机控制器结构示意图如图4所示。

图3 舵机控制原理示意图
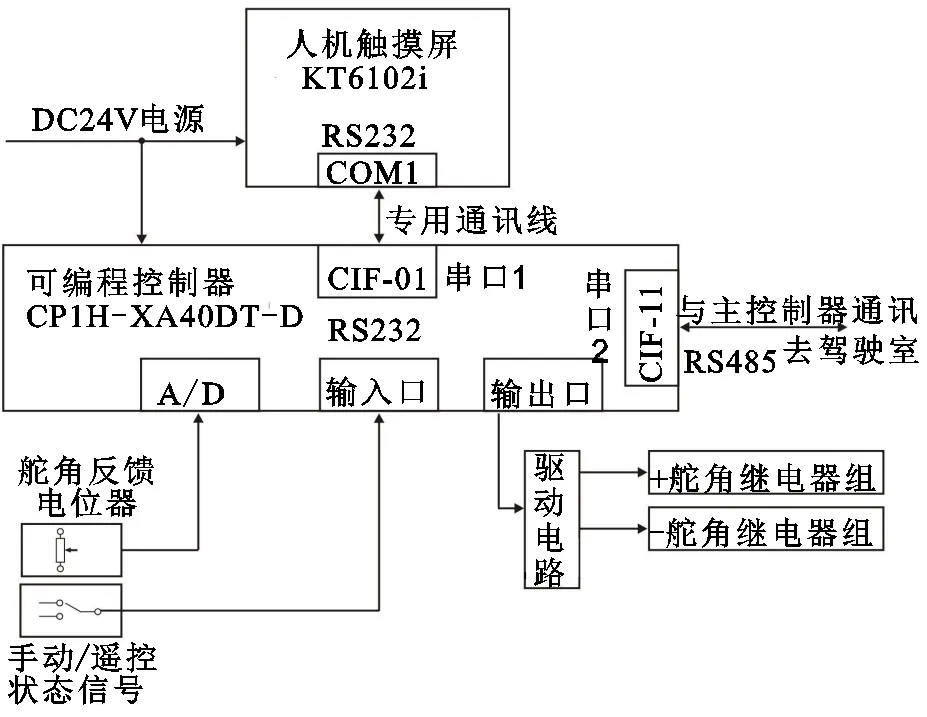
图4 舵机控制器结构示意图
主控制器接收无线遥控转舵指令,主控制器通过RS485通讯口将指令传给舵机控制器内的PLC,PLC对舵角指令和实际舵角进行比较,如不一致,发出左舵或右舵命令,直到实际舵角与指令舵角一致为止。通讯中断后,PLC的保护程序将舵角控制在“0”度或左满舵。
1.5 通讯控制器设计
通讯控制器是遥控靶船控制系统的重要组成部分,承担与指挥系统联络的重要工作,其主要功能由三部分组成,北斗卫星导航、无线电台通讯和北斗短报文通讯。
1.5.1 北斗卫星导航
采用低功耗设计,两路天线输入信号独立跟踪,支持北斗B1/B2,提供毫米级载波相位观测值和厘米级 RTK 定位精度,支持芯片级多路径抑制,领先的瞬时RTK和高精度定向技术。在本应用中,单点平面定位精度可以达到1.5 m,满足靶船的测试要求。
为适应高可靠性、高稳定性、适合严酷的工作环境,电路设计选用高性能的电子元件和SMT技术。位置信息输出频率最高可以达到20 Hz。
为避免靶船在航行中偏离航向,本例采用双天线设计,在船体的中心轴线上,船头和船尾各安装一个高精度天线,通过馈线将信号传送至北斗定位模块。模块再获取两路信号后,根据两点形成一条直线的原理,通过解算可达到0.2度的定向精度。
北斗卫星导航模块将定位数据和航行数据送至主控制器,主控制器根据既定的路线,实时调整电动舵机的舵角和调距浆的航速。
同时,主控制器将定位数据和航行数据按照一定的频率发送指挥船,由指挥船完成跟踪信息的更新。
1.5.2 北斗卫星航向信息的解析
航向是靶船中心轴线上的2个天线形成的基线向量顺时针方向与真北的夹角,接收到该条信息后,通讯控制器需要提取航向角和俯仰角信息。
例如其语句格式如下:
#HEADINGA, COM2, 0, 90.0, FINE, 1939, 182038.000, 00000000, 930250813, 0; SOL_ COMPUTED, NARROW_INT, 37.0693, 288.0244, -0.7296, 0.0000, 0.0093, 0.0213, "0", 21, 21, 21, 21, 0, 01, 0, c3*968a3e06
数据由信息头、解算状态、位置类型、基线长(0至3000 m)、航向(0至360度)、俯仰(±90degrees)、航向标准偏差、俯仰标准偏差、跟踪的卫星数量、使用的卫星数量、截止高度角以上的卫星数量、扩展解状态、信号掩码、32位CRC校验、语句结束符组成。
上位机软件通过解析以上语句,获取靶船的航向信息,并可以实时显示在电脑屏幕上。同时,指挥船适时发出控制指令,调整靶船航向,避免洋流或风浪驱使靶船偏离既定航向。
1.5.3 北斗卫星定位信息的解析
北斗定位的主要数据是卫星定位数据输出格式语句GNGGA语句,是NMEA格式中使用最广的数据之一。其语句格式如下:
$GNGGA, 023340.00, 3030.42133177, N, 11420.18534531, E, 1, 19, 0.7, 72.8315, M, -14.4857, M, 00, 0000*6B
数据由信息头、位置对应的 UTC 时间(小时/分钟/秒/十分之一秒)、纬度(DDmm.mm)、纬度方向(N = 北, S = 南)、经度(DDDmm. mm)、经度方向(E = 东, W = 西)、GNSS 质量指示符、使用中的卫星数、水平精度因子、天线高度、天线高度单位(M = 米)、大地水准面差距、大地水准面差距单位(M = 米)、校验和、语句结束符组成。
上位机软件通过解析以上语句,获取靶船的位置信息,可以实时显示在电脑屏幕上。同时,调取数据库中的一段时间的定位信息,连接形成曲线,从而得到这段时间靶船的运行轨迹。
1.5.4 无线电台通信
采用传统的大功率无线电台,与现场指挥船保持联络传输数据。具有传输数据量大、通信质量稳定可靠的特点,最大传输距离可以达到几十海里。
1.5.5 北斗短报文通信
作为无线电台的备选方案,在无线电台停止工作后,自动启动北斗短报文通信功能。该部分采用北斗卫星定位导航系统特有的短报文通信功能,实现对靶船的监控和遥控命令的下发,靶船实时数据的上传。
短报文通信具有传输距离远、保密性高、通信质量稳定可靠的特点。在北斗导航卫星覆盖范围内,可实现全天候无障碍通信。配合指挥卡的使用,既可以实现点对点的传送,也可以实现点对多的传送。
北斗短报文通信需要遵从一定的卫星通讯协议。在北斗通信控制软件内嵌入“北斗4.0协议”程序,完成数据格式转换,以实现对接收到的电文数据的解析,控制命令的分发和响应;对要发送的短报文数据进行格式化、编排组织和启动发送。
2 功能测试
2017年在海上进行某型陆基导弹的测试。
测试人员将靶船驾驶至既定海域,在将靶船进行调整设置后,测试人员撤离靶船,靶船进入遥控状态。
指挥船通过不断回传的定位数据,在地图上查看靶船的位置。通过电脑远程控制靶船的航速和航向。

图5 指挥软件界面
各项功能测试合格后,靶船进入就绪状态。由指挥中心通知导弹发射基地进入准备发射状态。
15:37,在输入靶船坐标信息后,导弹腾空发射,向目标海域飞去。
与此同时,指挥船向靶船发出指令,启动最大航速,向正南方向“逃窜”。
5分钟后,导弹到达目标海域上空,完成1次变轨,调整导弹飞行姿态。
30秒后,导弹启动末端制导系统,向靶船飞去。
5秒钟后,导弹准确击中靶船,海上传来巨大的爆炸声,海面腾起冲天水柱。
指挥船与靶船的通讯中断。搜救船随即进入目标海域,打捞靶船上的数据记录仪。
经过事后对数据记录仪解密分析,靶船各项功能工作正常,其航速航向以及运行轨迹与雷达测量的结果完全一致。
3 结论
本文介绍了北斗卫星导航系统在遥控靶船上的应用,对靶船的电控系统(调距桨装置和电动舵机装置)和北斗卫星导航定位系统,以及北斗短报文功能做了重点介绍。
卫星导航系统是一个国家综合国力的体现,是大国强国的标志。原北斗卫星导航系统总设计师孙家栋院士说过“北斗系统的重中之重在于应用”,应用是北斗建设的出发点和落脚点。而北斗的应用领域只受人们的想象力所限,可以说没有做不到,只有想不到。它已经成为一种崭露头角的全球信息基础设施,是推动国家经济建设和实施可持续发展战略的强有力支撑。
北斗卫星导航技术在遥控靶船上的推广应用,不仅提高了遥控靶船的战技术性能,同时也提升了海军武器装备性能和武器装备试验效果。对推动了北斗卫星导航事业的发展,打破GPS在卫星定位导航领域的垄断,具有积极的意义。
该型靶船在海军部队的使用,实践证明,该产品性能稳定可靠,抗干扰能力强,远程遥控可靠,操作简单。这些优点使得该型遥控靶船有着广泛的应用前景。
本文的创新点在于将北斗卫星导航技术引入遥控靶船智能控制领域,提高了遥控靶船功能与性能,具有较好的军事及经济效益。
[1] 北斗卫星导航系统及其应用推广的国家意义[J]. 领导文萃, 2017, (7).
[2] 战兴群, 赵隽, 张炎华等. 机舱监测报警系统研制[J]. 船舶工程, 2001, (3): 42-46.
[3] 闫世杰. 船舶信号[M]. 人民交通出版社, 2006: 26-82.
The Design of the Pitch Control System Based on PLC
Cheng Tianqing, Han Xiaogang
(PLA Dalian Naval Academy, Liaoning 116018, China)
P228
A
1003-4862(2018)11-0010-04
2018-08-02
程天庆(1970-),男,高级工程师。研究方向:船舶控制及其自动化。E-mail:hghxg@163.com
