反坦克弹光纤惯导嵌入式信号采集系统设计与实现
2018-11-28,,,
,, ,
(西安现代控制技术研究所,西安 710065)
0 引言
惯性制导是反坦克战术导弹中常用的制导手段,惯性导航系统利用正交配置的三只陀螺仪和三只加速度计传感器信号获得载体在导航坐标系下的运动信息,配合导航计算机实时解算,为导弹控制系统提供速度、位置、姿态、角速度和加速度等导航信息[3],惯性制导具有全天候、抗欺骗、高可靠的技术优势,能够适应导弹恶劣使用环境或复杂机动。
惯性导航系统是战术导弹的重要组成部件,对确保导弹控制系统中制导精度、动态响应速度及末制导捕获概率至关重要[2],因此惯性导航系统中的高精度惯性传感器信号同步采集电路的精度性能与实时处理速度显得尤为重要。综合导弹应用环境对惯导成本、体积、通用化程度的特殊要求[1],本设计采用高可靠的捷联惯导硬件平台方案,陀螺仪选用紧凑型三轴一体光纤陀螺[4],具有低成本、结构简单、节省空间、低功耗、直接数字输出的特点,加速度计采用小型石英挠性加速度计[5],具有成本低、技术成熟度的优势。针对加速度计电流模拟信号输出与后端高精度采样的需求,信号同步采集与实时处理电路前级设计了电流到频率脉冲专用电路模块,后端采用基于DSP+FPGA架构的嵌入式电路方案,对陀螺输出的串口信号与加速度计模/数转换后的脉冲进行同步采集与计数。
1 系统方案
本系统主要实现惯性测量单元(光纤陀螺仪及加速度计)输出信号的采集和处理,其硬件组成包含二次电源模块、IF转换模块、信号采集与处理模块及运行在此模块上的软件组成[6]。系统组成与电气流向关系如图1所示。
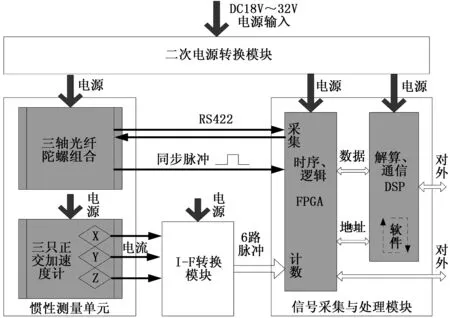
图1 系统总体结构框图
三轴光纤陀螺用于测量弹体相对惯性空间的角运动,加速度计敏感弹体相对惯性空间的线运动加速度。二次电源电路主要用于将一次电源转为系统内部各功能模块所需的二次电源;IF转换电路将加速度计输出的电流信号转换为频率脉冲信号;信号采集与处理电路采用DSP+FPGA架构,主要用于接收控制器的指令,采集三轴光纤陀螺组合、IF转换电路和外部机载组合导航系统的输出信号,并实现系统自检、传递对准、空中修正及弹上导航等功能,向外部实时输出导航信息;其中FPGA实现串口信号采集、多路频率脉冲计数、信号同步、时序逻辑和外设硬件接口扩展;DSP芯片响应外部操控指令,实现功能任务调度,对采集得到的角速度和加速度信息进行温度、安装误差补偿,完成初始对准与导航解算相关任务。FPGA编程灵活,方便扩展, DSP芯片浮点运算精度高、速度快,在确保系统数据处理的实时性和准确性同时还具有结构紧凑、体积小、功耗低等优点,能够满足通用惯性系统的信号处理要求。
2 各子模块设计
2.1 二次电源电路设计
二次电源电路主要为三轴光纤陀螺仪、加速度计、IF转换电路、信号采集与处理电路等功能单元提供工作电源。
二次电源电路设计输入标称电压为DC28V,输入电压范围为18~32 V;有两路独立的输入电压及EMI滤波,可实现电源无缝切换和独立输入供电功能,确保系统在任意情况下可正常工作,同时具有反向通电截止、过流保护等防护功能;二次电源电路总效率大于75%。
2.2 IF转换电路设计
由于加速度计原始输出电信号为微弱电流信号,进数字计算机处理前需要利用量化电路将其模拟电流转换为数字信号。而量化电路对微弱信号转换的准确性与稳定性,将直接影响惯性导航装置的传递对准、纯惯性导航解算及空中修正的精度。因此,设计高精度抗干扰量化电路是保证惯性导航装置精度的前提。电流信号转换电路的实现方案一般为基于逐次逼近的A/D转换[8]和基于累积效应的电流到频率脉冲转换(简称IF转换)[7]。
由于加速度计的精度和分辨率在微安级,若采用A/D转换,要保证高精度数据采集,在硬件实现上较为复杂,精度、可靠性、实时性、抗干扰性均难以保证,在数字信号处理方面也复杂,信号采样易失真。
IF转换是通过对电流积分达到电荷平衡实现电流信号转换为数字信号,转换过程无缝隙,既克服了A/D转换的诸多不足之处,又能够保证转换精度要求。本文采用了IF转换原理的方式对加速度计输出的电流信号进行量化处理。IF转换电路主要由积分器、阈值电路、比较器、同步电路、换向开关、恒流源和整形电路等组成的闭环系统,如图2所示。IF转换电路所采用的电荷平衡的转换方法,是指在输入的模拟电流信号和内部的精密恒流源间建立的一种电荷平衡。输入的电流信号进入于两种状态交替工作的积分器中,积分器有两种工作模式,一种是积分模式,另一种是复位模式,积分器的输出经过比较器后触发同步电路,同步电路形成一个时间宽度正比于输入电流幅度的高电平,一路经过整形计数器输出脉冲数字信号,另外一路控制电流开关,从而控制积分器交替工作于积分状态和复位状态。
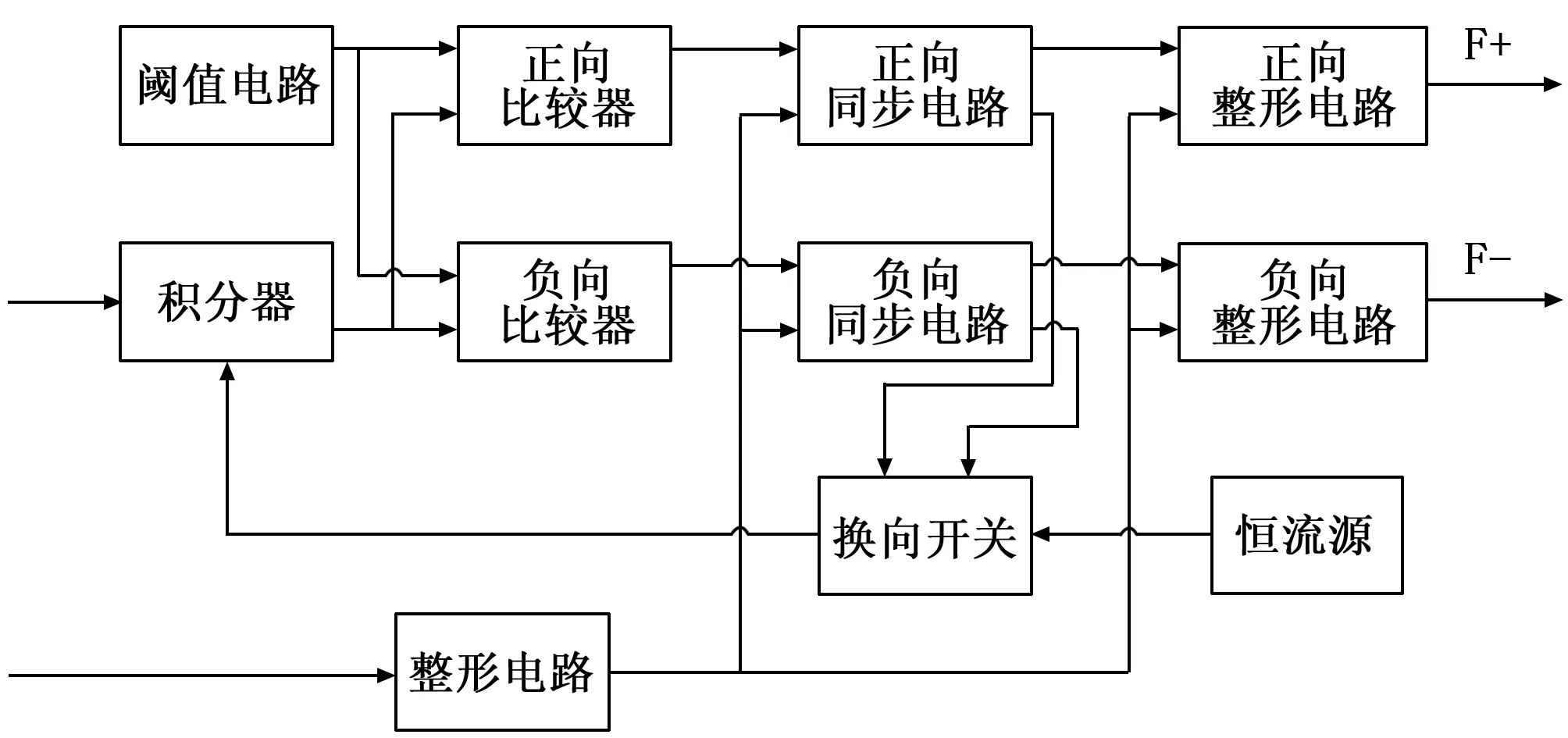
图2 IF转换电路原理框图
2.3 信号采集与处理电路设计
根据本系统需实现的功能,其运算性能和接口能力是设计时的主要考虑因素。基于技术成熟性,采用DSP处理器+FPGA的架构模式作为信号采集与处理电路的设计基础[9]。该架构模式功能界面清晰,性能稳定可靠,处理速度快,方便外围设备的扩展。其中,FPGA主要负责接口管理、时序逻辑控制、信号采集和通讯;DSP处理器选用TMS320C6722,主要完成运算功能。其主要技术指标如下:DSP处理器主频大于等于200 MHz;4路隔离的全双工RS422接口,每路串口的FIFO容量不小于128字节,波特率与奇偶校验位可软件配置;程序存储区与参数存储区分开,存储区FLASH空间大于等于2 M×8 bit;6路16 bit高速计数器;支持软件及参数的串口下载。
3 软件设计
3.1 FPGA脉冲采集系统设计
本设计选用Xilinx公司的Spartan-6芯片作为整个系统的信息采集核心,以完成对光纤陀螺原始信息的采集及解析[10]、对IF转换电路信号采集、中断控制及通信。本设计采用VHDL语言,以模块化编程的方式在FPGA中实现信号采集、处理和控制功能,其主要的子模块有:脉冲信号滤波模块、脉冲信号计数模块、脉冲信号数据二次锁存模块、中断控制模块和RS422通用异步串口通信模块。
1)中断控制。
DSP只有一个外部中断接收口,FPGA对外部各中断源信号进行逻辑组合运算使其满足DSP外部中断要求。FPGA对外部各中断源信号进行逻辑组合运算使其满足DSP外部中断要求,将各中断源状态锁存在中断状态寄存器中,以便DSP能够查询各中断源当前状态。输出通过并行总线读取中断状态信息。
2)IF转换电路信号采集管理。
IF转换电路信号采集管理单元完成脉冲计数的主控制流程。实时记录当前采集的IF转换电路有效脉冲信号数量,脉冲信号上升沿时计数。脉冲信号下降沿且ACLKX0为低时,把脉冲计数器的值锁存在一级锁存器,ACLKX0为高时,再把一级锁存器的数值锁存到二级锁存器中,以此避免脉冲计数器发生读写冲突。其中IF转换电路信号采集逻辑流程如图3所示,脉冲信号二级锁存逻辑流程图如图4所示。

图3 IF转换电路信号采集逻辑流程图 图4 脉冲信号二级锁存逻辑流程图
3.2 DSP运算处理系统设计
DSP的底层驱动软件实现硬件与软件之间的底层信息交互,以完成对硬件状态控制和数据读写;系统架构软件主要完成系统的任务规划、时序配置与功能管理;接口通讯软件主要实现对系统外部的指令流、数据流的接收与响应,对系统内部各传感器的数据采集与同步。
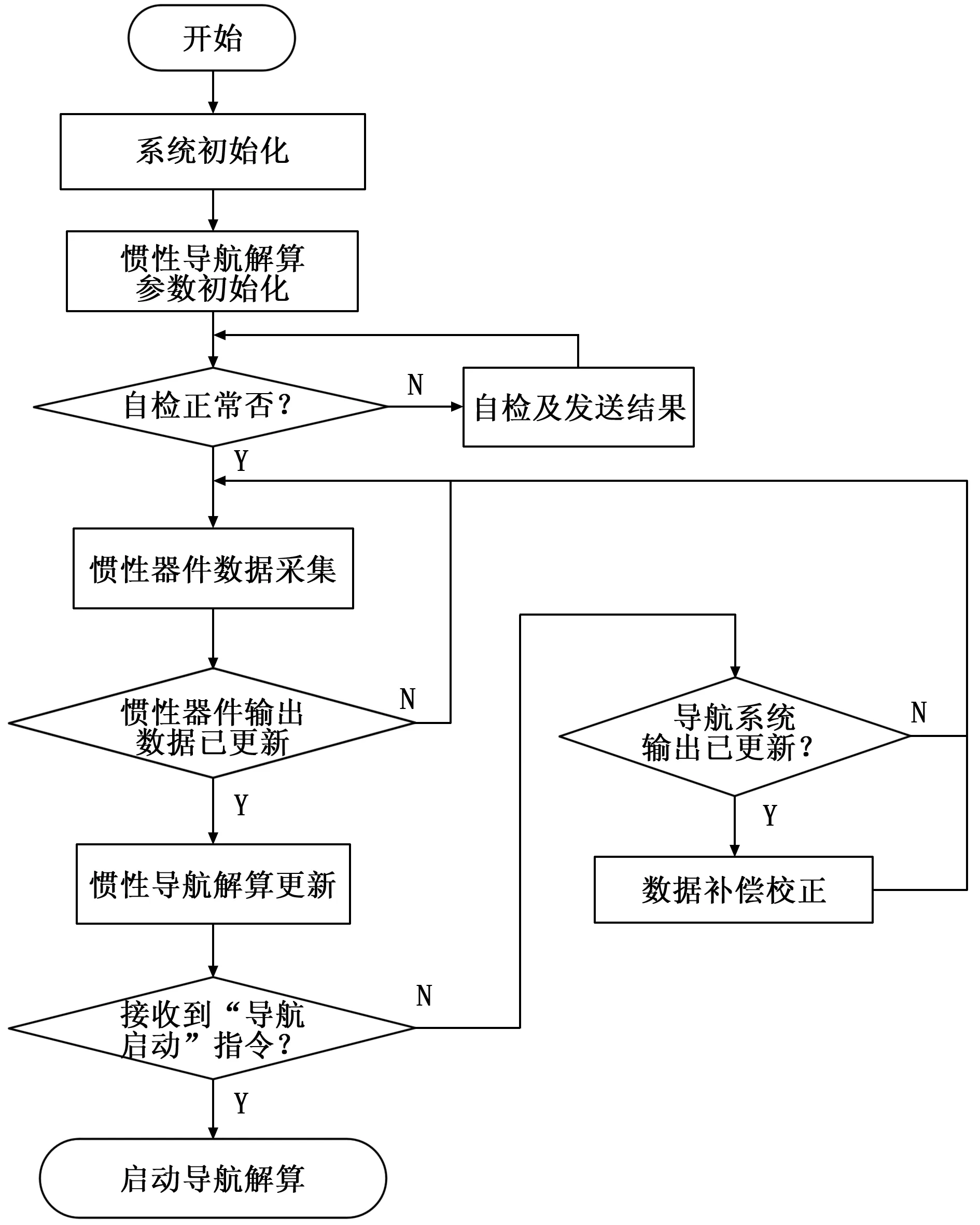
图5 惯性导航系统工作流程图
本系统软件由C语言设计,可进行在线仿真,软件固化在FLASH内,系统复位后可独立运行,整个系统模块的设计可以在不同环境下进行移植。本系统软件采用模块化、结构化的设计方法实现,将软件分为初始化模块、自检模块、数据采集模块、数据补偿模块、解算模块和通讯等模块。其中:初始化模块是完成导航计算机硬件参数初始设置以及全局变量初始化等功能;自检模块通过采集和计算光纤陀螺仪与加速度计的信息来判断惯性器件工作是否正常,同时检测系统的工作状态和检测串口总线功能是否正常并输出相应的自检结果;数据采集模块负责接收通过RS422串口的光纤陀螺仪信息、IF转换电路输出的脉冲信息及其他导航信息。本系统DSP软件工作流程如图5所示。
4 试验结果和分析
根据某型战术导弹通用惯性导航系统的要求,选用的三轴光纤陀螺组合输入量程为-300~+300°/s;加速度计测量范围为-50~+50 g,标度因数K1为1.1 mA/g,标度因数K1的全量程非线性误差≤0.01%。对应IF转换电路的主要技术要求为:输入电流范围-55~+55 mA,零偏≤3 Hz,线性度(正负通道)≤100 ppm。
为便于考核全范围内系统性能,本文采用FLUKE5500A基准源提供高精度高稳定性的电流信号模拟实际加速度计信号,电路上电1分钟后,给电路其中一路依次输入不同电流值,分别记录对应输入电流的输出脉冲值,典型测试结果如表1所示。

表1 典型测试结果
使用均方差法计算正负向通道频率输出线性度,具体公式如下:

测试结果可见零偏为0 Hz,计算可得其正向线性度为35 ppm,负向线性度为61 ppm,均满足IF转换电路的技术要求,同时验证了惯性器件信号处理系统设计的正确性和高精度性。
5 结论
本文针对战术导弹通用惯性导航系统的特殊要求,设计了基于DSP和FPGA的惯性器件数据采集系统,实现了三轴一体光纤陀螺和加速度计的输出信号的高精度实时采集,为惯性导航装置的误差标定、误差建模与补偿、系统导航算法实现提供了硬件平台和数据支持。通过实验验证了本设计的正确性,并且具有小型化、高精度、实时性高、接口丰富,多通道同步等特点,适用于多种弹型的导航装置或组合导航装置,扩展通用性强。
