基于无人机影像的建筑三维模型重建方法研究
2018-11-27杨建强
杨建强
(上海市政工程设计研究总院(集团)有限公司,上海市200092)
0 引言
三维空间信息技术的发展非常迅速,传统的二维平面图对于三维空间的表达能力十分有限,难以满足人们对三维空间信息的需求。鉴于此,国内外众多学者对于如何快速且有效地获取空间三维信息并对其进行三维模型的重建展开了深入的科学研究。三维模型重建常用的方法有基于摄影测量和基于三维激光扫描技术等。其中,使用三维激光扫描仪对建筑物进行扫描获得三维点云数据,可以快速重建出建筑物的三维模型,但是对较高建筑物的屋顶却无能为力。由于低空无人机具有成本低、操作灵活、受天气影响小等特点,尤其适合于小区域的航空影像获取,所以在建筑物三维重建中正发挥着越来越重要的作用。使用无人机可以充分地获取建筑物表面丰富的颜色、纹理等信息,特别是能够拍摄到地面三维激光扫描仪扫描不到的屋顶等区域。同时由于影像匹配算法的发展,无人机获取到的影像可以生成建筑物带色彩的三维点云,使建筑物的三维重建越来越方便与逼真。因此,研究基于无人机影像的建筑物三维模型重建方法,具有现实意义。
目前,国内外对建筑物的三维重建都已经取得了一些研究成果。邵振峰提出了一种基于航空立体影像对的人工地物三维提取和重建方法,并研究开发了一体化立体影像平台,利用该平台,可以实现部分较复杂房屋的三维重建[1]。翁姝提出了一种基于雷达数据和航摄图像的区域建筑物三维重建技术,但建筑物模型并不精细[2]。张龙提出一种结合自动重建和交互建模的两阶段建模系统,从多个视角下拍摄的建筑物图像出发,快捷有效地构建出建筑物的三维真实感模型[3]。Pueschel等使用小型无人机拍摄的序列影像,以及地面控制点处拍摄的影像,经过了影像处理、模型重建,以及纹理贴图等步骤生成了带纹理的且具有高分辨率的兰登伯格城堡的三维模型[4]。
现以某建筑物为研究对象,提出了一种基于无人机影像的建筑物三维模型重建方法。首先使用无人机对建筑物进行拍摄,影像匹配后获得密集点云;然后使用扫描仪对无人机无法拍摄的一些区域进行扫描,并将扫描点云与影像生成点云进行配准;对点云预处理,再进行Delaunay三角网构建,最后使用3D Max构建精细化模型,并对模型进行质量评估。
1 无人机影像与激光点云匹配
所研究的对象为某中学的一幢教学楼,表面色彩鲜艳,纹理丰富。教学楼墙面遮挡一般,可使用无人机拍摄屋顶和大部分的墙壁,对无人机无法飞行拍摄区域,采用地面激光扫描仪进行扫描补充。
1.1 屋顶影像密集点云生成
使用大疆无人机自带相机对教学楼的屋顶采用航带法连续拍摄,相机镜头垂直向下,与传统航摄在航向和旁向重叠度的严格要求相比,轻型无人机的要求可适当放宽,航向重叠度一般设置为60%~80%,最小不得小于53%;旁向重叠度一般设置为15%~60%,最小不小于8%[5]。由此拍摄到49张像素大小为4 000×3 000的屋顶序列影像,如图1所示。然后再采用PhotoScan软件对屋顶影像进行密集匹配生成密集点云,如图2所示。

图1 教学楼屋顶影像图示
图2 教学楼屋顶密集点云图示
1.2 墙面影像密集点云生成
以西立面为例,同样采用航带法对墙面进行垂直拍摄,得到16张连续运行,如图3所示。

图3 教学楼西立面影像图示
使用PhotoScan软件对墙面影像进行密集匹配生成密集点云,但是由于无人机GPS定位并不精确,且无人机的位置难以使用全站仪进行坐标测量,因此采用外加控制点坐标的方法求得墙面密集点云,控制点坐标见表1所列。由此获得的教学楼西墙面密集点云,以及控制点位置如图4所示,较好地还原了墙体的特征形状以及墙体的色彩信息。
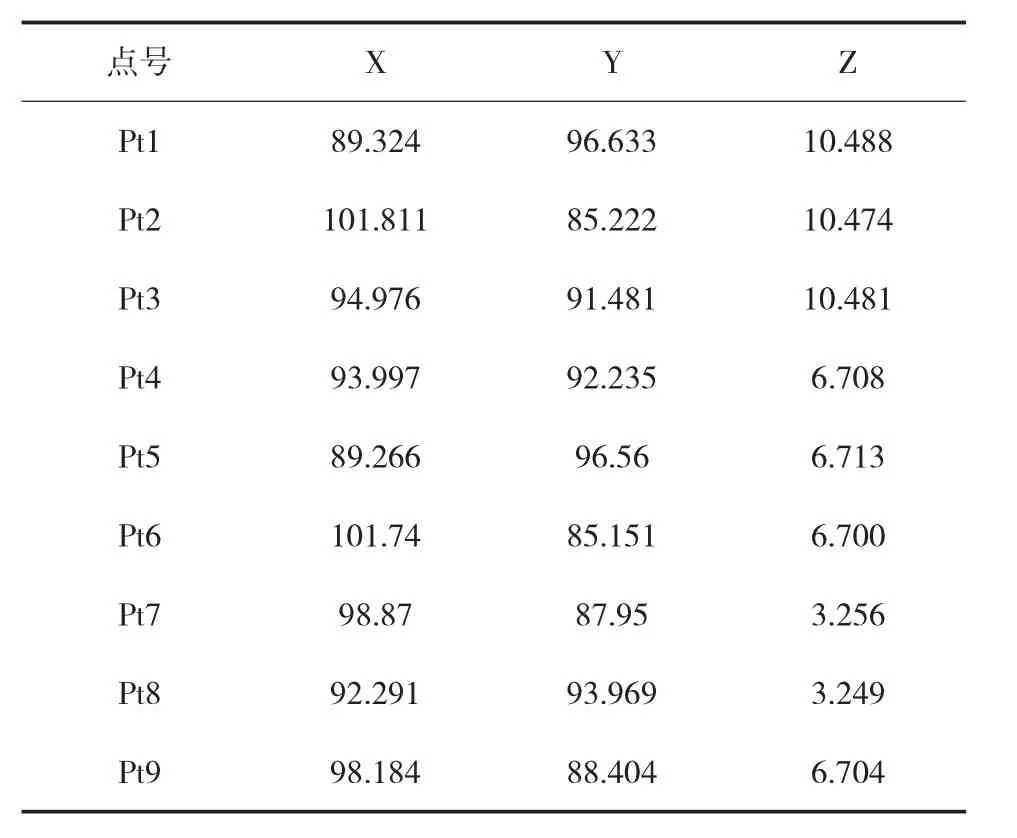
表1 建筑物表面控制点坐标表
1.3 密集点云与地面激光点云配准
1.3.1 墙面密集点云空洞修补
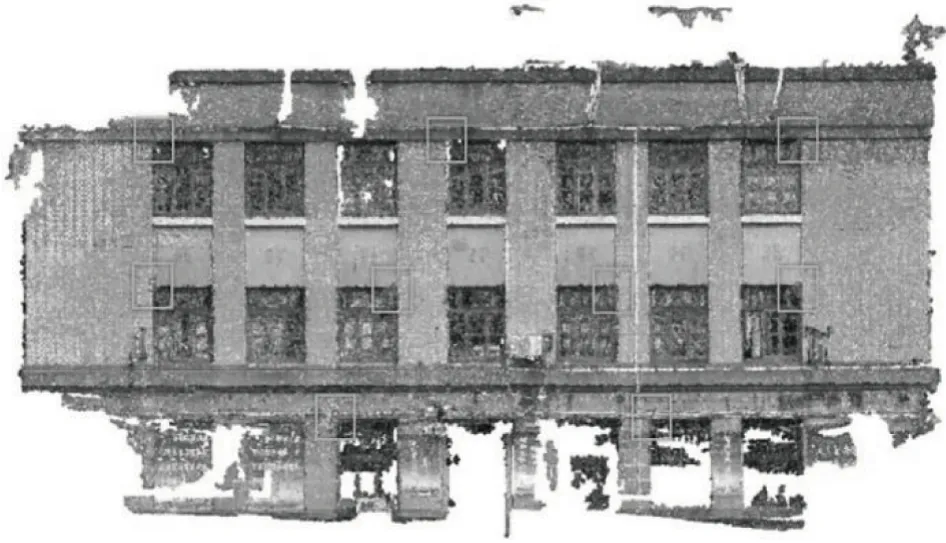
图4 教学楼西立面密集点云图示
墙面影像经过软件处理后获得密集点云,能够大体上反映出教学楼的形状,但是由于遮挡,密集点云中还是存在一些空洞,给建筑物重建带来一定困难,因此使用地面激光扫描点云来弥补空洞,并使用ICP算法进行配准。图5的(红)色框选范围为点云空洞,图6为激光扫描点云,图7为配准后的点云。

图5 密集三维点云空洞图示
1.3.2 建筑物屋顶点云与墙面点云拼接
由于无人机GPS定位不精确,因此生成的屋顶点云比例尺不对,采取的解决方法是量测屋顶点云两个角点A、B之间的水平距离DAB,并将其与前面配准后的墙面顶部角点点云A'和B'之间的水平距离DA'B'进行比较,确定放大的比例尺M为1.0165,这样就可以得到正确的屋顶点云。其中图8为屋顶点云图,图9为墙面点云俯视图。将建筑物屋顶点云和墙面点云同时导入到Geomagic软件中,固定墙面点云,人工移动屋顶点云,并将其与墙面点云精确拼接在一起,图10为拼接后的某中学教学楼三维点云图。
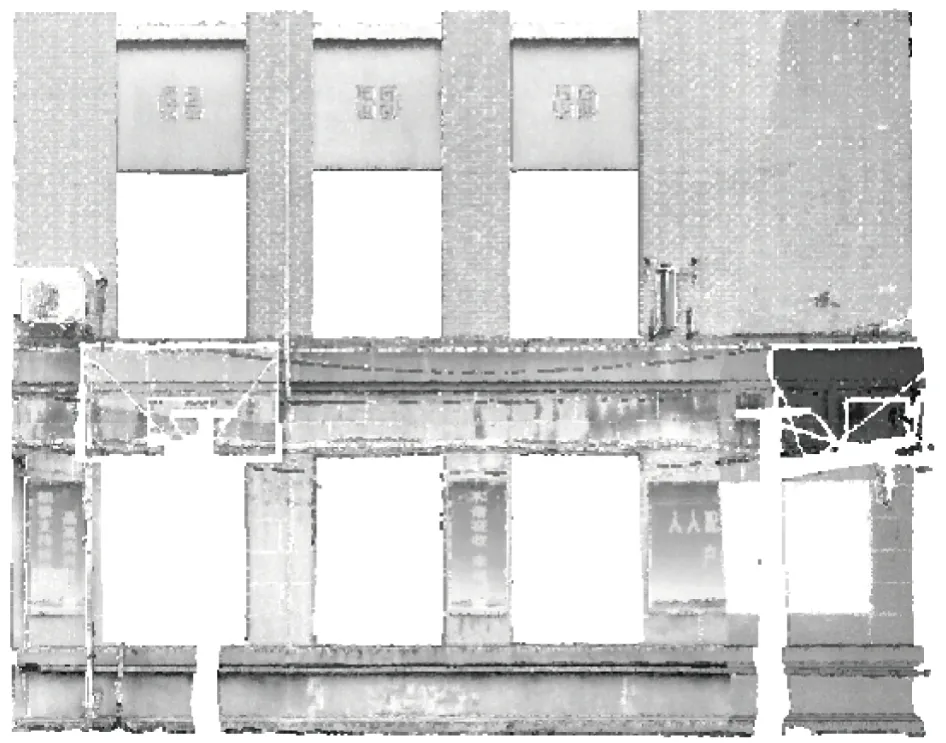
图6 地面激光点云图示

图7 配准后的墙面点云图示
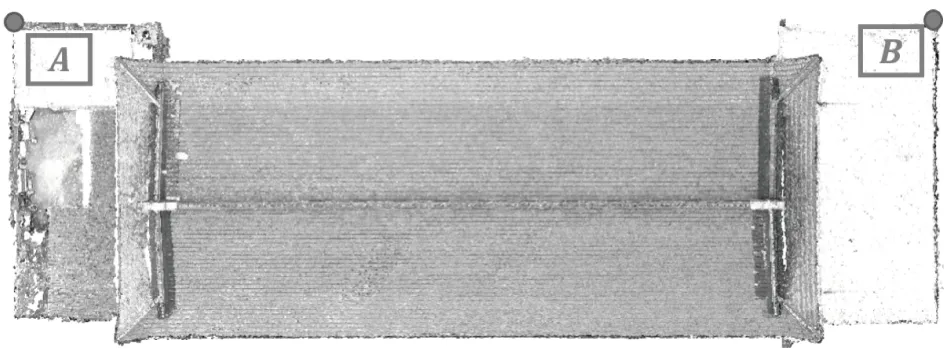
图8 屋顶点云图示

图9 墙面点云俯视图
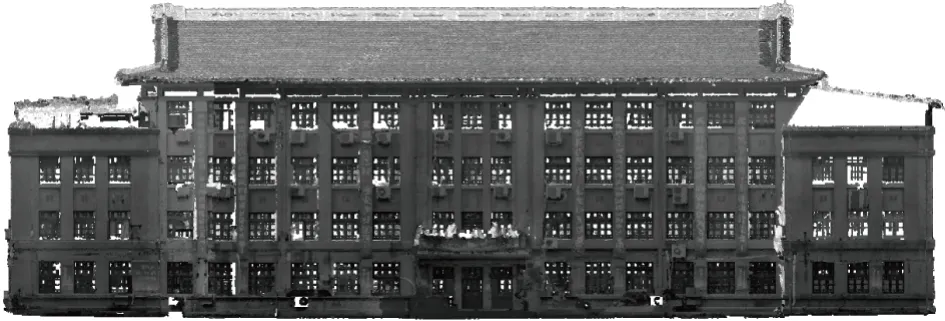
图10 教学楼三维点云图示
2 建筑物三维模型重建
2.1 点云数据预处理
经过影像匹配生成密集点云,且与地面激光点云配准后获得的建筑物表面点云数据不能直接用于建筑物三维建模,还需要进行点云数据预处理。包括点云压缩、网格数据生成等[6]。点云压缩方法有均匀采样法、曲率估算法、平均点距值法等。本文使用Geomagic软件提供的减少噪音和曲率法进行点云数据的去噪与压缩,曲率采用率为60%,压缩效果如图11所示。再采用Delaunay三角剖分法建立的墙面网格,如图12所示。
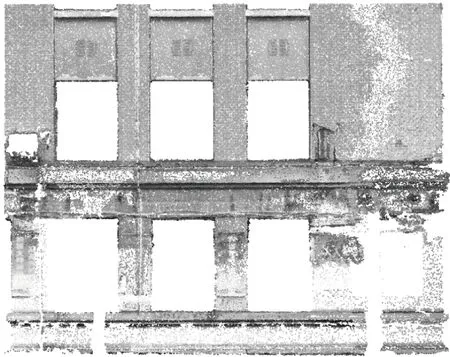
图11 点云数据去噪与压缩图示
2.2 建筑物三维建模
对经过点云预处理,以及三角网构建后,得到了建筑物墙面的三角网格,同时建筑物的外形特征也能够表现出来,但是这种方法得到的模型并不适用于有棱有角且外形规整的建筑物,因此使用3D Max对教学楼的模型进行精细化构建,实现了建筑物的三维模型重建。
2.2.1 墙体建模
在对建筑物的墙体进行建模时,需要先将这一部分冻结,其他不需要的部位隐藏,再从其它三个视图对其进行建模。建模时需要开启2.5维捕捉功能,使用“样条线”对单墙面进行重绘,然后再使用矩形对窗户进行绘制。在线的“修改器”面板下找到“附加”命令,将所有的窗户和墙面附加在一起,运用“挤出”命令,挤出厚度为200 mm,再在顶部视图中将建好的模型移动到真实的位置,对其余三面墙进行同样的操作,并移动到合适的位置。
2.2.2 部件建模
建筑物部件主要包含了建筑物主体墙壁以外的门窗、雕花、斗拱、屋顶装饰等部分。部件建模前需要开启2.5维捕捉功能,并冻结需要构建的部件。对门窗等规则的部件,使用“样条线”里的矩形命令对其进行描绘,再使用“挤出”命令,挤出门窗的厚度即可;对雕花、斗拱、屋顶装饰而言,则需要先使用“样条线”里的直线命令描绘,然后使用“Bezier角点”命令来调整线条不规则的区域,使得描绘出来的线条与实际需求尽可能一致,最后再挤出实际的厚度即可。图13为建筑物的各个部件。

图12 建筑物墙面点云封装图
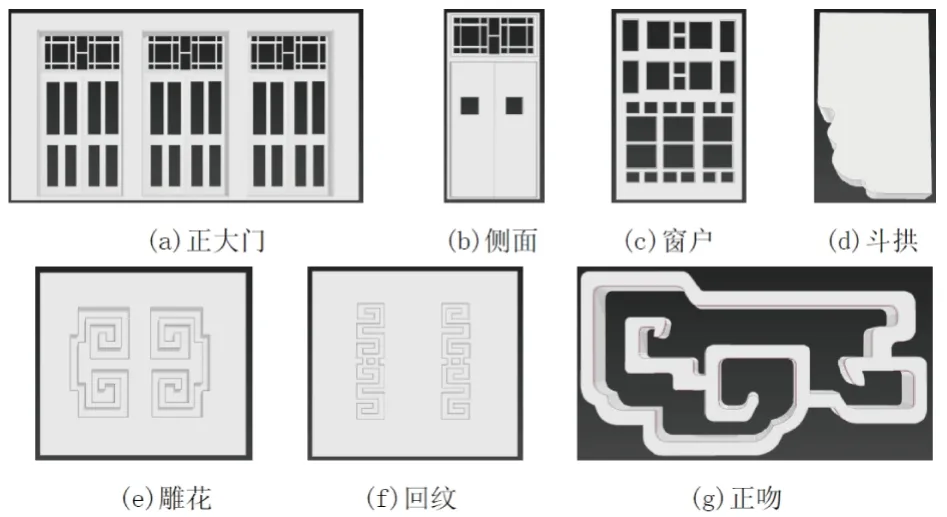
图13 建筑物部件图示
建筑物的所有部件建模完成后,将所有的部件都移动到正确的位置,生成建筑物的素模,再使用纹理贴图功能将纹理贴到建筑物模型上,最后生成的建筑物模型如图14所示。
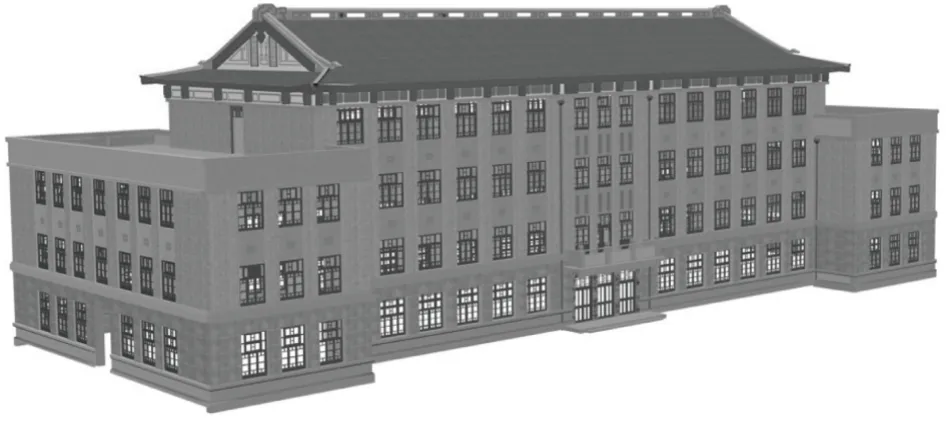
图14 教学楼楼体三维重建模型
2.3 建筑物模型质量评价
建筑物的三维模型是利用影像或者点云数据进行重建得到的模型,对于客观存在的实体,使用仪器采集的空间数据往往是不确定的,在原始数据采集、数据预处理和模型重建阶段都存在着影响模型精度的因素,这往往导致了重建后模型精度的损失。因此,任何重建的建筑物三维模型实际上只能是对建筑物实际形态的近似模拟,不可能完全真实反映实际情况,重建的建筑物模型需要进行精度评价。为此,采用距离法进行精度评价,在教学楼的西立面,通过在重建后的墙面上选择了8段特征线段,量测它们的距离。然后,使用全站仪在墙面上测量相同的点位坐标,计算其长度,将其与特征线段的长度比较,借以评定重建的精度。墙面特征点如图15所示,特征线段的距离比较见表2所列。

图15 墙面测距选点点位图
由表2可知特征线的实测长度与模型量测长度存在一定的偏差,但偏差较小,最大偏差值为1.5 cm,平均误差为10.6 mm,从距离比较结果来看,整体长度值偏差都在1.5 cm以内,能满足一般的建筑物三维建模的要求。
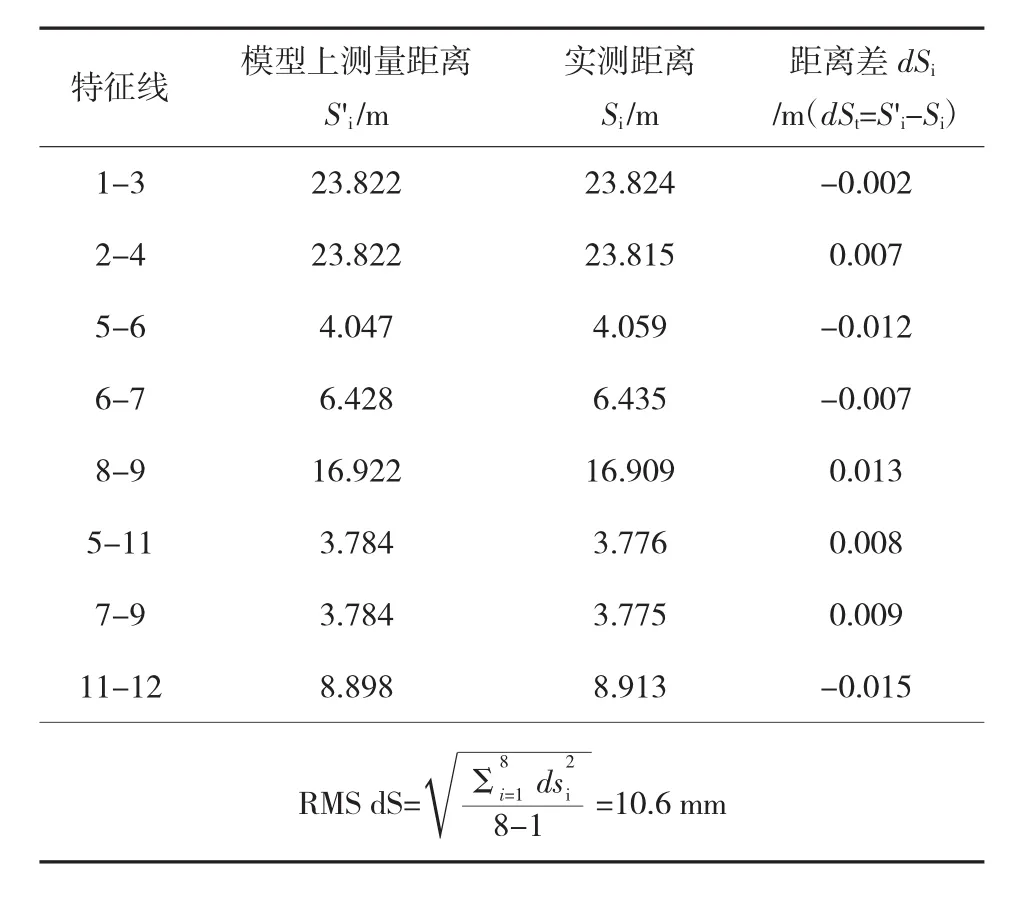
表2 特征线段距离表
3 结语
本文以无人机影像为主要数据来源,以激光扫描点云数据作为补充,经过影像匹配、密集点云生成、点云配准,以及使用3D Max建模等步骤实现了教学楼的精细化建模,并对其进行了质量评价,结果表明三维重建质量可靠,能够满足一般建筑物的建模要求。
