反舰导弹巡航高度决策研究∗
2018-11-26沈培志王培源
沈培志 高 健 王培源
(海军航空大学 烟台 264001)
1 引言
反舰导弹射程远、命中率高、杀伤威力大[1],在现代海战中通常担负“首战首突”任务,是精确打击海上目标的杀手锏武器。反舰导弹射击诸元较多,诸元决策的准确性直接影响导弹命中概率,进而可能对作战全局造成影响。文献[2~11]对反舰导弹射击方式、雷达搜索图、导引头开机距离、开机高度、巡航高度等射击诸元进行了研究,其建立的雷达搜捕、终点散布、目标机动等模型,参考和借鉴价值较高。
反舰导弹射击诸元决策,指决策者在诸元规定取值范围内确定一个参数值,作为该诸元飞行弹道装订值。以往射击诸元研究中,理论性强,研究成果偏重于提供决策依据,而整个决策过程研究不全面,通常缺少决策值确定环节。
本文将以巡航高度诸元为对象,开展全过程决策研究,望能为指挥决策提供参考。
2 反舰导弹高度诸元决策一般原则
反舰导弹高度诸元包括巡航高度、第一次开机高度、第二次开机高度、超低空平飞高度、俯冲高度等诸元。根据导弹性能和作战要求,高度诸元决策通常考虑“不被发现”、“不被抗击”、“看得见”、“击得中”、“不击水”等原则。
1)“不被发现”,即导弹位此高度飞行,不会被目标探测设备探测到;
2)“不被抗击”,即导弹位此高度飞行,不会被目标舰空导弹攻击到;
3)“看得见”,即导弹位此高度飞行,导引头能够搜索到目标;
4)“击得中”,即导弹以此高度撞击目标,能够重伤甚至击沉目标;
5)“不击水”,即导弹位此高度飞行,不会撞到海水。
导弹飞行过程中,受不同阶段、不同高度、不同目的制约,上述原则不可能同时满足,必有取舍。
3 反舰导弹巡航高度决策原则
当今大部分反舰导弹已实现巡航高度可装订,且装订值只能为整数;导弹巡航高度诸元是导弹飞行自控段[12]诸元。因此,定义反舰导弹巡航高度诸元决策为,在导弹武器系统规定高度取值区间内确定一个整数值,作为导弹自控段掠海飞行高度。
根据武器性能和高度诸元决策一般原则,对反舰导弹巡航高度诸元决策遵循原则分析如下:
1)巡航高度位于导弹飞行自控段,而导弹采用自控段掠海飞行的目的即为降低被发现概率,因此巡航高度决策必须考虑“不被发现”原则;
2)导弹飞行自控段导引头不开机,且距目标尚有一段距离,因此不用考虑“看得见”和“击得中”原则;
3)根据武器作战使用要求,反舰导弹通常用于6级以下海况,由表1知,6级海况最大波高为8.5m,而目前绝大多数反舰导弹巡航高度在10m以上,因此可认为导弹位巡航高度飞行不受海浪影响,即不用考虑“不击水”原则;
4)根据舰空导弹反导机理,目标舰船在对来袭导弹进行抗击时,使用搜索雷达对空搜索,若未发现目标,则不抗击,因此对反舰导弹来讲,若“不被发现”,则肯定“不被抗击”,即若考虑“不被发现”原则,则不用考虑“不被抗击”原则。
综上,巡航高度诸元决策只需考虑“不被发现”原则。
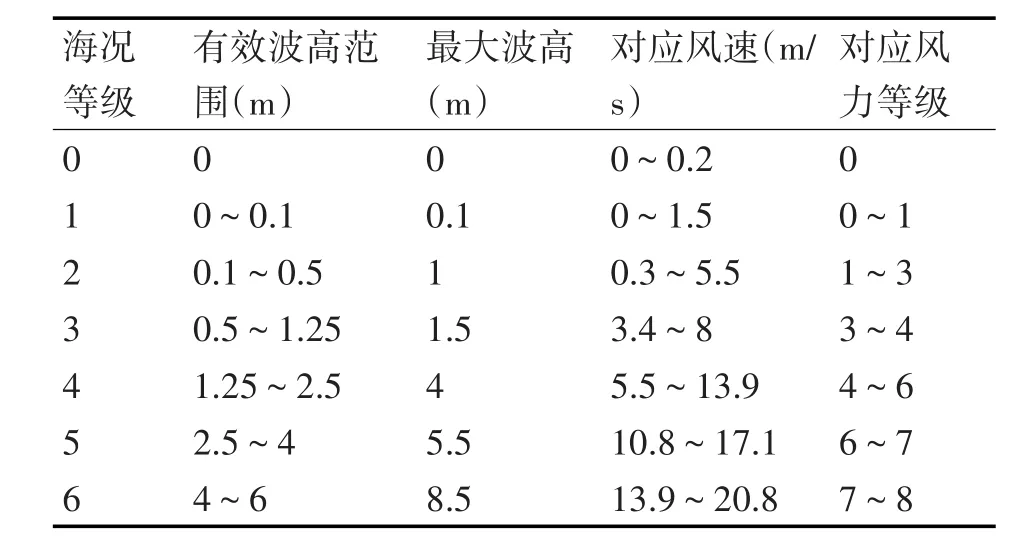
表1 海况与风力对应关系表
4 反舰导弹巡航高度决策模型
4.1 模型假设
基于以上分析并结合实际,模型建立前作如下假设:
1)目标仅用舰载雷达进行对空探测;
2)不考虑导弹隐身性和海杂波对雷达探测影响;
3)雷达探测距离受地球曲率影响。
4.2 数学描述
根据上述假设,绘制巡航高度诸元决策模型图,如图1所示。图1中,Hx为巡航高度,Hk为一次开机高度,hk为二次开机高度,Hc为超低空平飞高度,Hf为俯冲高度,Hm为目标舰载雷达天线高度,Rkj为一次开机距离,rkj为二次开机距离;A为导引头一次开机爬升点,对应海平面映射点K;B为一次开机点,海平面映射点L;C为一次开机高度向二次开机高度降高点,D为二次开机高度巡航起始点;E为二次开机点,海平面映射点M;F为二次开机高度向超低空平飞高度降高点,海平面映射点N;G为超低空平飞起始点;H为超低空平飞高度向俯冲高度降高点,海平面映射点O;I为俯冲高度飞行起始点;J为目标舰载雷达。
根据武器性能,导弹通常于第一次开机前Δr时开始向一次开机高度爬升。由图1知,只要目标舰载雷达对巡航高度Hx最大探测距离Dx不超过A点,则反舰导弹“不被发现”,数学描述:
上式,距离单位为km。
4.3 模型解算
受地球曲率限制,目标舰载雷达对巡航高度Hx最大探测距离Dx与自身天线高度Hm、反舰导弹巡航高度 Hx有关,其表达式[11]:
式中,Hx、Hm单位为m,Dx单位为km。
将式(2)带入式(1),整理得:
实际作战中在进行高度诸元决策时,通常经分析研判可得到一个决策依据表达式,如式(3),此式可能缩小诸元参数取值范围,但不能得到一个确定的决策值。高度诸元决策时,若高度取值过高则易被敌发现,过低则击水概率会增加,因此为方便决策,现提出一种保守的决策理论,简称中间值决策,此理论适用于巡航高度、第一次开机高度、第二次开机高度、超低空平飞高度、俯冲高度等诸元决策。
中间值决策:假设H表示需决策诸元,系统规定参数可装订范围为[a,b],通过分析研判得决策依据表达式为H<h1或H>h2,则H决策如下:
5 反舰导弹巡航高度决策舍弃模型
5.1 模型假设
1)地球为正球形;
2)舰载雷达探测不受外界因素干扰,最大探测距离为其直线距离。
5.2 数学描述
图2中,O点为地球球心,Rd为地球半径,JS相切于海平面,其线段长度为舰载雷达对巡航高度Hx的最大探测距离,其他字母含义与图1相同。
设线段JS对应球心夹角为φ1,巡航段末端与目标舰船的海平面映射点连线KR对应球心夹角为φ2,则“不被发现”的数学描述:
上式,角度单位为弧度。
5.3 模型解算
根据几何关系可知:
因JS相切于海平面,由三角函数得
根据武器性能,导弹于第一次开机前Δr开始爬升,因此弧线KR长度为Rkj+Δr,则
将式(10)、(11)带入式(7)即可求得巡航高度Hx决策依据表达式。
5.4 模型说明
上述模型虽然可以解算,但实际上地球并不是正球形,地球半径Rd约6371km,而目标舰载雷达高度和巡航高度均在百米以下,与地球半径相比几乎可忽略不计,若模型中Rkj、Δr、Hm稍有变化,解算结果中巡航高度Hx变化将很大,难以决策。因此,研究决定放弃此模型,但为避免他人在类似研究中走弯路,故作以上说明。
6 仿真分析
6.1 想定情节及仿真计算
假设我方采用某型反舰导弹对敌驱逐舰1艘实施导弹攻击,其中反舰导弹巡航高度在[20,55](单位m)范围内可装订。
作为指挥员,巡航高度决策过程如下:
1)经敌情分析,假设得到敌驱逐舰舰载雷达距海面高度Hm=15m;
2)根据导弹性能,假设反舰导弹在第一次开机前Δr=5km时开始向第一次开机高度爬升;
3)经研究,第一次开机距离Rkj决策为40km;
4)根据式(6),计算得
6.2 结论分析
由上述决策过程分析,指挥员在诸元决策时应重点把握以下几点:
1)加强敌情研究,掌握主要对手作战舰艇基本资料,如上述敌驱逐舰舰载雷达高度;
2)深化“我情”知识学习,熟练掌握自身武器系统技战术性能,如上述我反舰导弹爬升时机Δr;
3)诸元决策并不是独立的,而与其他诸元息息相关,如上述巡航高度诸元决策需建立在第一次开机距离Rkj诸元决策基础上。
7 结语
反舰导弹诸元决策的准确性直接影响导弹命中概率,而决策准确性的关键在于找准决策依据。决策依据可能缩小诸元取值范围,但不能得到确切的决策值。因此,本文大胆提出了中间值决策理论。通过仿真分析看,此理论能够很好实现巡航高度决策,下一步应加强各诸元决策间相互关系研究。
