基于内外透镜组合的LED后雾灯设计
2018-11-23乐能友石智伟史新刚
乐能友,石智伟,史新刚
(1.广东工业大学机电工程学院,广东 广州 510640;2.法雷奥照明佛山技术中心,广东 佛山 528000)
引言
在汽车照明系统中,后雾灯是一种非常重要的信号灯,主要用于雨雾天气行车时道路照明与安全警示。当前大部分汽车后雾灯都还是传统的结构设计,一般由灯泡和抛物面型反射面组合而成。这种灯具体积较大,效率一般只在5%~7%,并且灯泡的光通量和发光角度较大,会导致路照有明显的眩光亮斑,影响驾驶员的行车安全。
LED光源,具有体积小,响应快,效率高,色域范围广等诸多优点,是一种节能环保的新型光源[1]。目前部分后雾灯的设计已经采用LED光源和非成像透镜组合,从而提高了效率,降低了眩光。舒浙伟等利用菲涅尔透镜和自由曲面组合设计后雾灯[2],其反射腔为基于抛物面的自由曲面,菲涅尔透镜作为外透镜,二者组合为后雾灯模组。这种方法虽然具有较高的工作效率,但是菲涅尔透镜的设计较为复杂,其加工精度要求也较高,这无疑会增加整个灯具的生产成本。谢望等[3]则提出另外一种LED 汽车后雾灯模块组设计,这种模组设计是利用抛物面和聚光器等不同组合的结构来对汽车后雾灯进行配光设计。这种模组具有较高的生产效率,但这些模组结构较为单一,且光源的效率不佳。蒋荡华等[4]提出了激光光源应用在汽车后雾灯中,激光尽管单色性好,穿透力强,但是激光相对于LED发热更大,并且提高了生产成本,所以激光汽车后雾灯还停留在理论中。
目前针对后雾灯的研究设计方法较多,但各有优缺点[5]。基于此,本文提出一种基于内外透镜组合LED后雾灯的设计。内透镜为提高效率的准直透镜,而外透镜则为实现照明均匀化的自由曲面透镜,所以两者组合而成的后雾灯不仅具有较高的效率,而且照明分布均匀。因其结构紧凑,设计简单,其生产成本也大大降低,实用性较强。
1 内透镜设计
针对LED芯片的出射光呈余弦辐射分布的特点[6-9],本文采用了一种反射-折射复合型结构的准直透镜作为内透镜,对LED芯片出射的光线进行准直,提高了光源的效率。


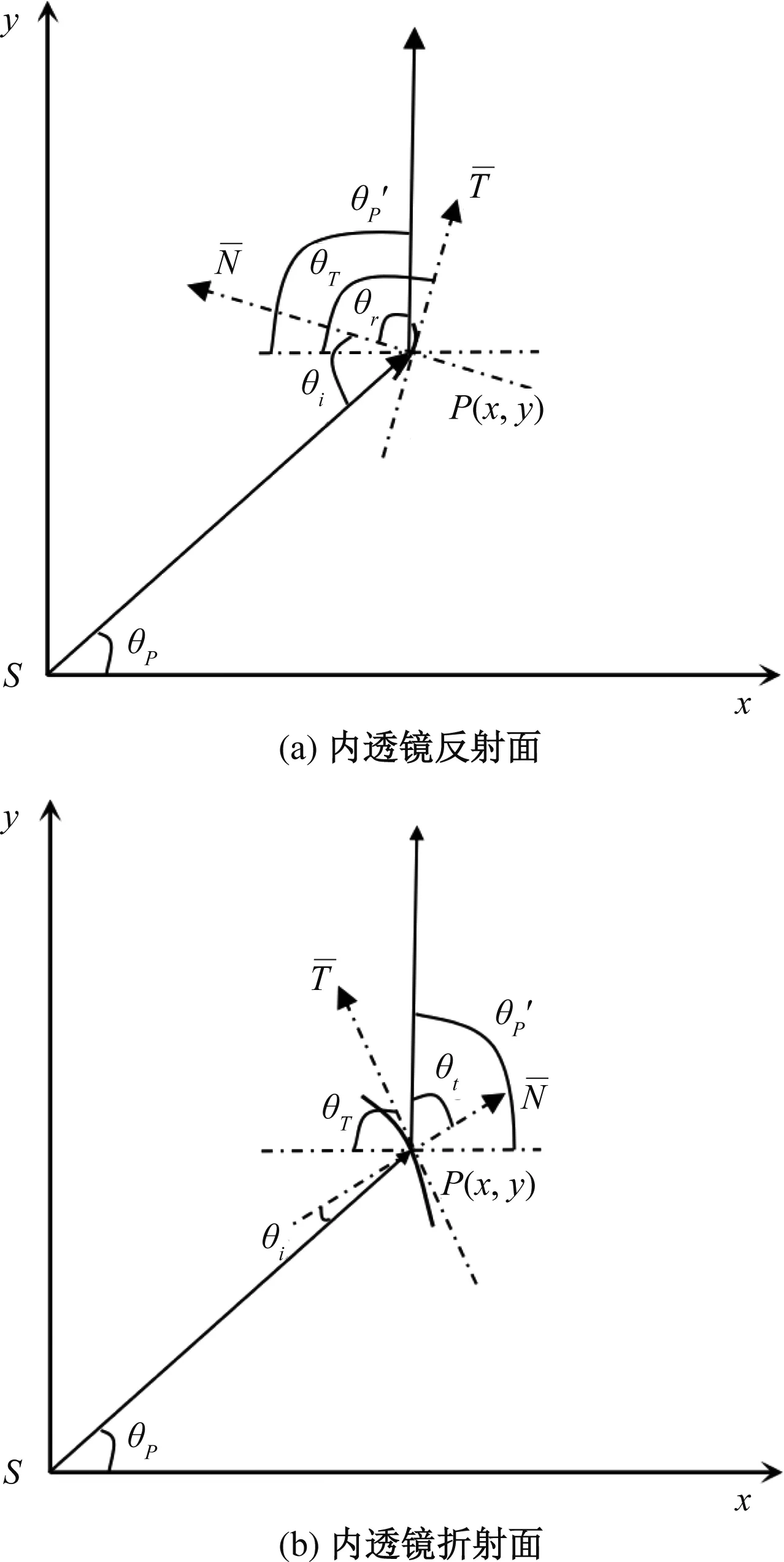
图1 内透镜反射面与折射面的设计原理Fig.1 The design principal of the reflective surface and refractive surface of inner lens
给定一个初始点坐标(0,r),利用欧拉法对微分方程(1)进行迭代求解[10-13],即可得到反射曲线上的离散点,并将这些离散点拟合成自由曲线。其中初始点中r值的大小可以根据实际需要进行设定。

(2)
如果给定一个初始点坐标(h,0),类似反射曲线,我们可得到折射曲线。
3)反射面和折射面组合。利用MATLAB软件对上述设计方法进行编程实现[16],获得反射曲线和折射曲线组合的自由曲线[如图2(a)所示],然后将该曲线作为母线导入三维软件CATIA中,旋转即可得到准直透镜,其三维模型如图2(b)所示,高度为10 mm,底面半径为5 mm。最后,将该透镜作为单元进行十字形阵列排列,形成后雾灯的内透镜。
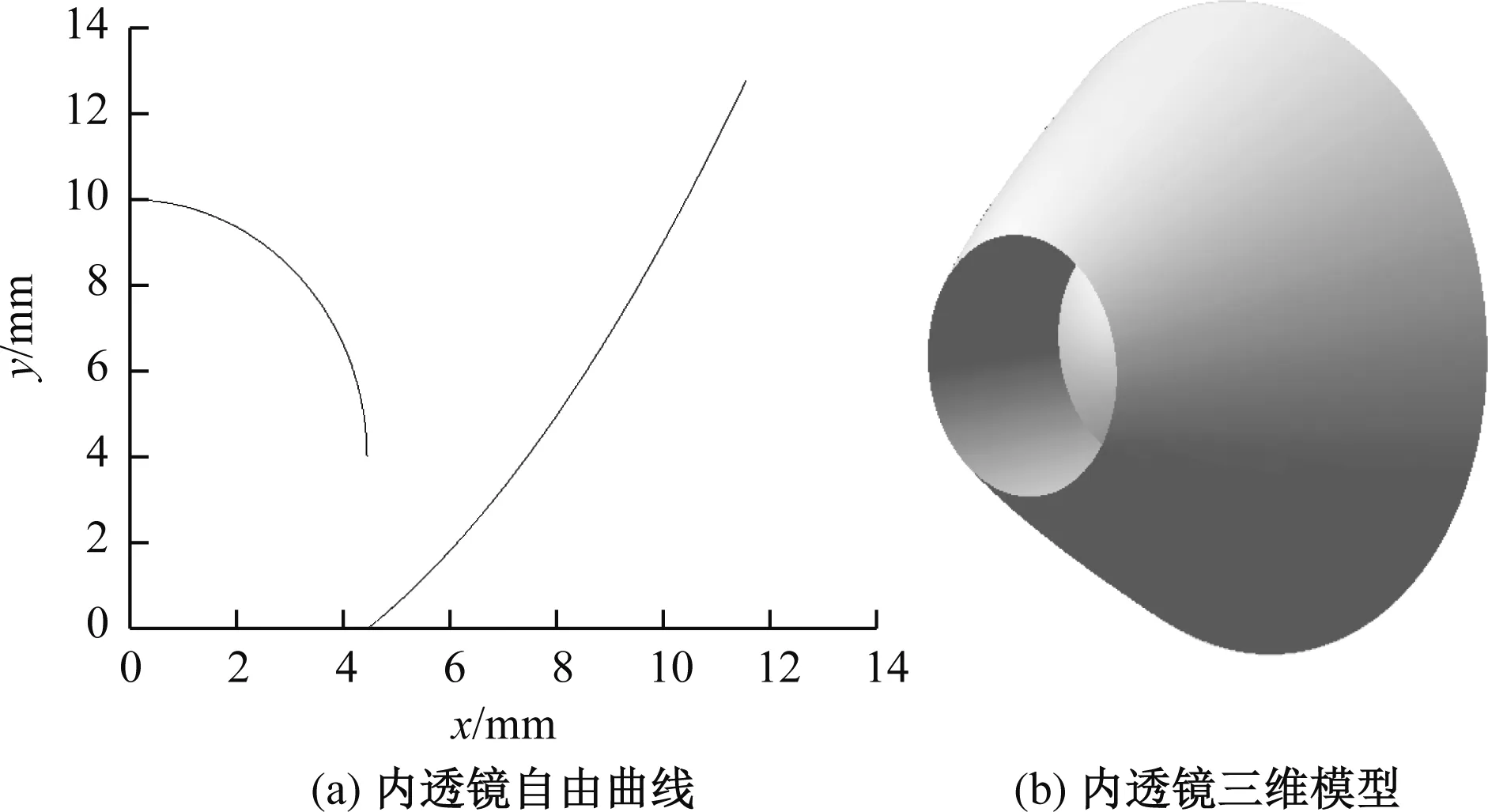
图2 内透镜的自由曲线与三维模型Fig.2 Free curve and 3D model of inner lens
2 外透镜设计
为了满足后雾灯的法规要求,进一步设计外透镜,从而将内透镜准直出射的光进行打散,这样既可以更好的满足配光区域,又能消除路面照度的眩光斑点。本文采用的外透镜其内表面为平面,外表面为阵列化的球面透镜,也就是说,以球面透镜作为单元,在外透镜外表面上进行阵列排列。因此,球面透镜的设计至关重要。假设该球面透镜的母线经过空间某一平面三个点A(xA,yA,zA),B(xB,yB,zB),C(xC,yC,zC),则其圆心坐标为
(3)
其中D=2[xA(yB-yC)+xB(yC-yA)+xC(yA-yB)]。
该圆的半径为
(4)
式中|AB|、|BC|、|CA|分别表示由A、B、C三点组成三角形ΔABC的边长, |ΔABC|表示ΔABC的面积。根据式(3)和式(4),可以得到不同参数的圆弧,如图3所示。将这些圆弧段导入软件CATIA 中旋转
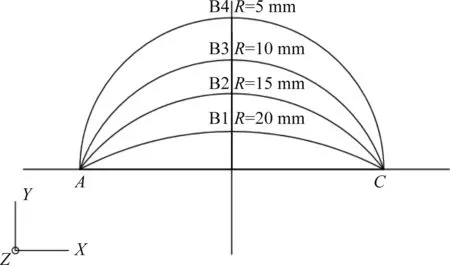
图3 球面透镜单元曲线Fig.3 The unit curves of spherical lens
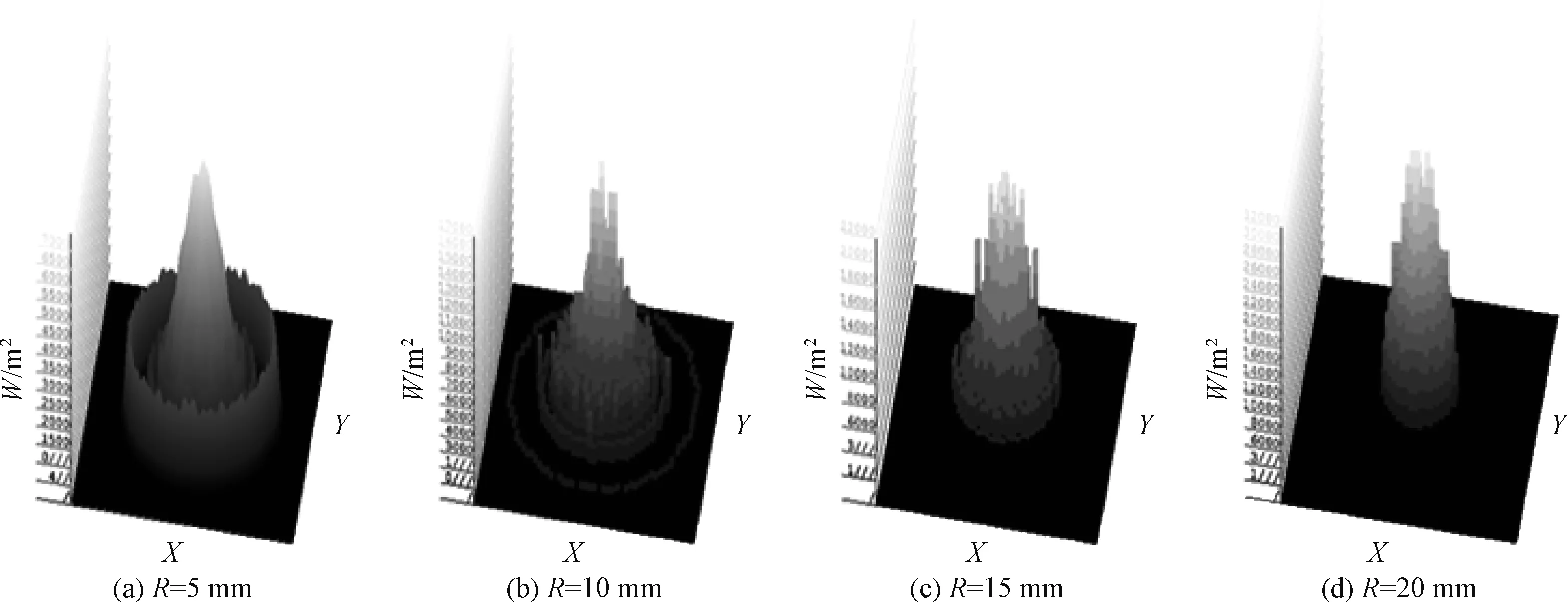
图4 不同半径球面透镜的三维照度Fig.4 3D illumination of spherical lens of different radius
即可得到几组不同参数的球面透镜模型,设定球面透镜到路面的距离为1 m,路面面积为1 m2,进而利用光学仿真软件START进行光学仿真[17],以上述同一个准直透镜出射光线照射不同半径R的球面透镜,其对应的三维照度分别为图4(a)、(d)。图4(a)中R=5 mm的球面透镜对应三维辐照度的峰值约为7 000 W/m2,其能量较为分散,整体也比较均匀;图4(b)中R=10 mm的球面透镜对应三维辐照度的峰值约为16 000 W/m2,其旁瓣较小,能量较为集中;图4(c)和(d)中R等于15 mm,22 mm的球面透镜对应三维辐照度的峰值约分别为20 000 W/m2,30 000 W/m2,其照度无明显旁瓣,能量非常集中。由此看出,球面透镜的半径越大,经过该透镜的光在路面上的能量越集中,峰值也越大;反之,出射光的能量越分散,照度也越均匀。因此,选择合适半径的球面透镜,并将该透镜在外透镜外表面上进行阵列化,然后组合内外表面即可得到后雾灯的外透镜。
3 后雾灯整体设计及结果
本文设计的后雾灯包括上述内透镜和外透镜组合以及PCB板,其三维模型如图5(a)所示,由于内透镜是由5个准直透镜单元呈十字形排列而成,为了配合内透镜,焊接在PCB板上的五颗LED光源也呈十字型排列,并且每颗LED位于准直透镜中心。为了观察该后雾灯在点亮时其路照效果是否均匀,我们进行了点亮路照的仿真,设定内透镜的材料为PMMA8N,外透镜的材料为PMMA18241, LED型号为LCYH9PP,其中每颗LED的光通量为20 lm,总光通量为100 lm,照明区域为20 m×6 m。其结果如图5(b)所示,可看出在整个照明区域内,光斑均匀,无明显的眩光。
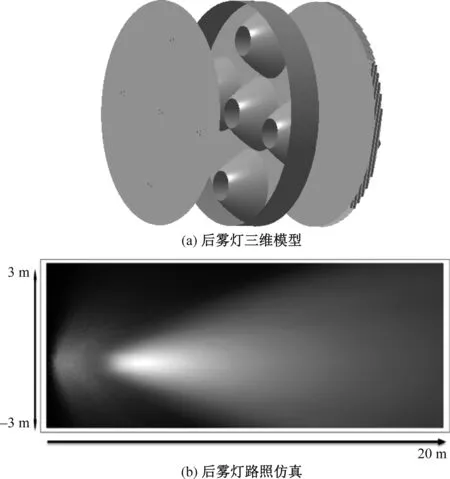
图5 后雾灯三维模型与路照仿真Fig.5 3D model of rear fog and road illumination distribution
图6(a)为后雾灯ECE R38法规的配光区域及要求。后雾灯ECE R38法规规定,在配光区域中,左右10°,上下5°的菱形区域内,整个区域的光强最小值不能低于75 cd,整个区域的光强最大值不能低于300 cd;在水平(H)和垂直(V)轴线上的值不能低于150 cd,也不能高于300 cd。图6(b)为仿真坎德拉图,图中整个区域的范围为左右20°,上下15°,水平(H)和垂直(V)轴线上每个小格单元为5°。外圈为75 cd的坎德拉线,表示在该线内的光强值都不小于75 cd;内圈为150 cd的坎德拉线,表示在该线内光强值不小于150 cd;图6(b)中整个区域的最大光强值为254 cd。对比图6(a)中的ECE R38法规,可知该后雾灯满足ECE R38法规要求。后雾灯的效率一般定义为区域(Zone)光通量与总光通量的比值[18]。从图6(b)中可以看出区域光通量为21.8 lm,又仿真时所用总光通量为100 lm,故该后雾灯的效率为21.8%,相较于传统后雾灯只有5%~7%的效率,该后雾灯的效率有了明显提高。
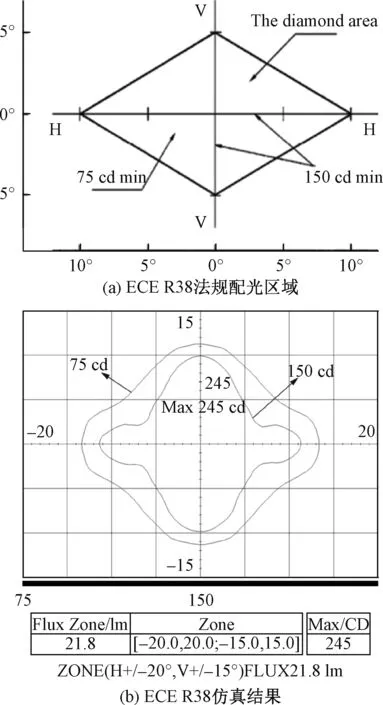
图6 ECE R38法规配光区域及其仿真结果Fig.6 The distribution area of ECE R38 regulation and simulation results
进一步,为了更好地验证该后雾灯的实效性,我们对该灯的实体模型(图7)进行了实际检测,其测试数据如表1所示,在左右10°上下5°的配光区域内,最小值为164 cd,最大值为214 cd,该测试数据与仿真结果较吻合,满足ECE R38法规要求。

图7 后雾灯实体模型Fig.7 The real model of rear fog
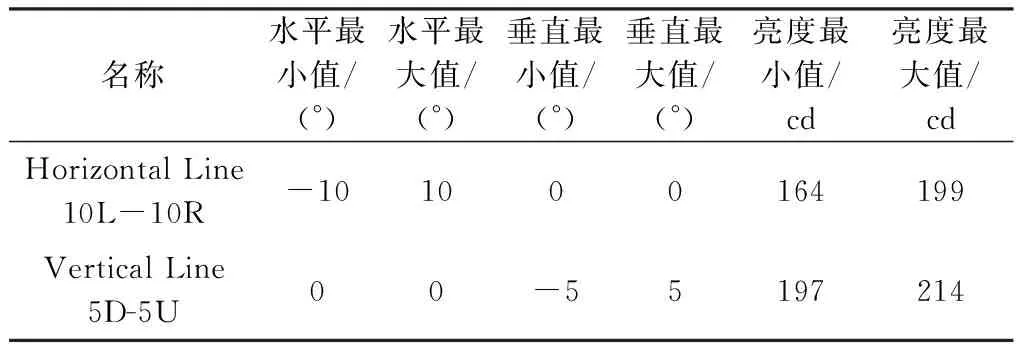
名称水平最小值/(°)水平最大值/(°)垂直最小值/(°)垂直最大值/(°)亮度最小值/cd亮度最大值/cdHorizontal Line 10L-10R-101000164199Vertical Line 5D-5U 00-55197214
4 结论
本文根据非成像光学理论,设计了一款高效率、结构紧凑、点亮路照均匀的后雾灯。区别于传统的抛物面与灯泡的结构,该款后雾灯为内外透镜组合与LED光源的结构。其中,内透镜为十字型阵列化的多个反射-折射的复合型准直透镜;外透镜分为内表面和外表面,而内表面为平面,外表面为阵列化的多个球面透镜。通过光学软件仿真模拟以及实体模型的实际测试,发现该后雾灯满足ECE R38法规,并且光源的效率为21.8%,远高于传统后雾灯。另外,通过仿真分析点亮路照,无较为明显的眩光光斑,整个点亮照度分布均匀。因此,该后雾灯具有较强的实用性,可用于汽车照明。