半挂汽车列车挂车主动转向控制研究*
2018-11-22徐晓美张磊刘凯陈宁
徐晓美 张磊 刘凯 陈宁
(南京林业大学,南京 210037)
主题词:半挂汽车列车 路径跟随 挂车主动转向 联合仿真
1 前言
半挂汽车列车具有车身总长度较大、牵引车与挂车间铰接式连接等特点,挂车对牵引车路径的跟随性能较差,特别是在交叉口和环形交叉口等转弯空间有限的城市交通环境下,挂车的运行轨迹会向弯道内侧偏移,严重时会剐碰弯道内侧的车辆和基础设施。此外,在此转弯过程中,挂车轮胎还承受较大的侧向力,致使轮胎磨损加剧。
针对上述问题,相关研究人员已开展了大量研究。研究发现[1],若能使挂车车轮转向,则可有效改善挂车对牵引车的路径跟随性能,从而提高车辆的通过性。目前,使挂车车轮转向的方式主要有被动和主动两种。被动转向主要基于随动转向原理提出,较典型的研究如文献[2]和文献[3]提出的随动转向技术。随动转向虽可在一定程度上改善挂车的路径跟随性能,但因挂车车轮的随动转向角较小,因此其对挂车路径跟随性的改善程度有限。主动转向基于相应的控制策略,可根据实际路况主动改变挂车车轮的转动方向和转动角度,能极大地改善半挂汽车列车的路径跟随性[4-6]。目前挂车车轮主动转向控制主要聚焦于其控制目标的选取与控制器的设计。由于路径跟随和车辆动态控制的复杂性,有些控制策略和控制器设计并不能满足路径跟随控制的要求。基于此,本文提出了一种源于驾驶员模型焦点预瞄思想的挂车后轮主动转向控制技术,设计了路径跟随控制器,搭建了Simulink与TruckSim的联合仿真平台,并基于此仿真平台开展了挂车后轮主动转向的半挂汽车列车路径跟随性数值研究。
2 半挂汽车列车模型
图1所示为某六轴半挂汽车列车的简化模型。坐标系x1o1y1、x2o2y2分别为牵引车和挂车质心处的坐标系,O为牵引车与挂车的铰接点。半挂汽车列车的主要几何参数包括:牵引车质心o1至其前轴和中间轴距离a1、b1,牵引车上铰接点O至其中间轴和后轴距离c1、d1,挂车质心o2至其铰接点O和前轴距离a2、b2,挂车中间轴至其前轴和后轴距离c2、d2,挂车轮距L。半挂汽车列车的运动参数和姿态参数包括:牵引车与挂车的质心侧偏角β1和β2,横摆角速度ψ̇1和ψ̇2。

图1 半挂汽车列车简化模型
汽车列车转弯时,牵引车与挂车的瞬时转弯中心往往不重合,两者的运动轨迹也明显不同,如图2所示。转弯通道宽度A和偏移距B是汽车列车机动性的重要评价指标[1]。转弯通道宽度A等于牵引车最外端一点至转弯中心的距离Rmax与最后一节挂车最内侧边沿至转弯中心的距离Rmin之差。偏移距B指牵引车前轴中心转弯轨迹与最后一节挂车后轴中心转弯轨迹间的径向半径之差。较大的转弯通道宽度A和偏移距B意味着半挂汽车列车无法通过小半径的曲线路段。

图2 汽车列车转弯轨迹示意
3 轨迹跟踪控制器设计
本节研究半挂汽车列车挂车低速主动转向控制器的设计,通过挂车3根轴上车轮的主动转向控制提高挂车对牵引车运动路径的跟随性能。控制过程为:计算并存储牵引车前轴中心的实时坐标,构建挂车后轴中心的目标路径;计算挂车后轴中心的实际路径与目标路径间的预瞄偏差量;基于预瞄偏差量调整挂车车轮转角以减小偏差量。
3.1 目标路径构建
由于半挂汽车列车牵引车前轴与挂车后轴间的距离较长,挂车后轴相对于牵引车前轴的运动具有明显的滞后,为此引入移位寄存器,将牵引车前轴驶过的轨迹以点坐标的形式存储起来,以构建目标路径供挂车后轴中心参考跟踪。
如图3所示,在固定坐标系XOY中,牵引车前轴中心在X方向和Y方向上每一瞬时的坐标可表示为:
式中,v1为牵引车的纵向车速。

图3 路径跟随示意
同样,半挂车后轴中心在X方向和Y方向上每一瞬时的坐标可表示为:

这些坐标均可由车辆的动力学响应参数求出。为此,牵引车前轴中心驶过的轨迹可表达为:
坐标点(x1(0),y1(0)),…,(x1(n-1),y1(n-1)),(x1(n),y1(n))形成了牵引车前轴中心的行驶路径。随着时间的推移,车辆不断向前移动,新的坐标值被读取,历时最久的存储值被丢弃,该过程在数学上可描述为[5]:

3.2 预瞄偏差量计算
如图4所示,挂车坐标系x′o′y′固结在半挂车后轴中心,x′为挂车后轴中心航向角方向,将牵引车前轴中心轨迹的绝对坐标转换成挂车坐标系下的相对坐标。

图4 轨迹径向误差
挂车后轴中心航向角θ2r为挂车横摆角和挂车后轴中心侧偏角之和:

式中,ψ2是挂车的横摆角;β2r是挂车后轴中心侧偏角。
牵引车前轴中心轨迹坐标点转换到挂车坐标系下的坐标值为:

式中,x12(i)、y12(i)(i=0,1,…,n)为点(x1(i),y1(i))在挂车坐标系中的坐标值。
如果x′方向上的坐标值满足条件:

那么,坐标(x12(i+1),y12(i+1))即为预瞄点,y12(i+1)为预瞄偏差量大小。
此时挂车后轴中心与牵引车前轴中心轨迹的偏移量为:

3.3 挂车车轮转角计算与分配
通过实时计算预瞄偏差量,不断调整挂车前轴、中间轴和后轴车轮转角,从而实现对挂车的主动转向控制。如图5所示,假定在挂车后轴中心构建1个虚拟车轮,该车轮转角可按式(9)不断调整[7]:

式中,T为机械机构的延迟时间;K为操纵增益;yε为预瞄偏差。
对式(9)两侧进行拉普拉斯变换可得:

对式(10)中e-Ts按Taylor级数展开,并考虑到时滞量T是小量,取Taylor级数前2项可得:

对式(11)进行拉普拉斯逆变换,可得一阶微分系统方程为:

挂车前轴、中间轴和后轴左、右车轮转角满足阿克曼几何转向原理,假设车轮为刚性体,可认为挂车各车轮的瞬时转向中心交汇于一点,此时各车轮作纯滚动,见图5。

图5 挂车车轮转角关系
半挂车上铰接点O处的侧偏角可表达为:

根据阿克曼转向原理,可确定挂车各车轮的转向瞬心交汇点Ot相对于铰接点O的横向和纵向距离lOt、hOt:

挂车后轴内、外侧车轮转角δN2r、δW2r可表示为:

同理,可得前轴与中间轴内、外侧车轮转角:


4 联合仿真平台搭建及试验工况设置
为验证所设计控制器的控制效果,使Simulink中设计的控制器应用于TruckSim软件平台中的六轴半挂汽车列车,搭建半挂汽车列车挂车车轮主动转向控制的联合仿真平台。
首先,将3A Cab Over w/3A Euro Trailer六轴半挂汽车列车整车模型导入Simulink中,车辆模型的输出为牵引车和挂车质心侧偏角、横摆角速度、牵引车的纵向车速,以及当前时刻牵引车前轴中心、半挂车后轴中心坐标。其次,将这些输出经过相关处理,与建立的控制器模型连接,根据给定的控制目标获取挂车各车轮的转角。最后,将这些挂车车轮转角输入TruckSim整车模型,即可实现半挂汽车列车挂车车轮主动转向控制的联合仿真研究。
按GB 1589—2016要求,考虑到车宽为2.43 m,因此在开展仿真时,设置圆形路径的半径为11.5 m,仿真时牵引车前轴中心沿直线行驶一段距离,逐渐进入圆形路径,车速设置为6 km/h,仿真时长40 s。
5 仿真结果分析
基于上述联合仿真平台开展了半挂汽车列车横向动力学特性与路径跟随性的仿真。为呈现挂车车轮转向对半挂汽车列车相关性能的影响,比较了挂车有、无主动转向功能的情况下牵引车与挂车的各项性能指标。
图6所示为牵引车与挂车运动轨迹的比较。由图6可知,挂车车轮主动转向后,其后轴中心轨迹能很好地跟随牵引车前轴中心轨迹,其偏移距仅为0.32 m,相对于挂车无主动转向时的偏移距4.25 m下降了92%。
图7所示为汽车列车通过上述路径时的TruckSim仿真动画比较。由图7可更直观地看出,挂车车轮主动转向显著减小了汽车列车的最大扫掠路径宽度,车辆的通过性和机动性都得到了显著提高。
图8所示为牵引车与挂车间铰接角的比较。由图8可知,与挂车无主动转向相比,挂车主动转向后,牵引车与挂车间的铰接角明显减小,且汽车列车能更快地趋于稳定状态。

图6 牵引车与挂车的行驶轨迹比较

图7 TruckSim仿真动画比较

图8 铰接角比较
图9 所示为牵引车与挂车质心侧偏角的比较。由图9可知,挂车主动转向后,其质心侧偏角方向与挂车无主动转向时相反,这是由于半挂汽车列车以较低车速通过小半径路径时,需要通过调整挂车转角方向使挂车车身向弯道外侧偏移,继而使挂车后轴中心轨迹逼近牵引车前轴中心轨迹,从而提高车辆的通过性。由图9还可看出,挂车主动转向可使挂车质心侧偏角更快地达到稳定值。

图9 质心侧偏角比较
图10通过转向盘转角的比较进一步呈现了挂车主动转向有利于减小半挂汽车列车的转弯半径。由图10可知,挂车主动转向的半挂汽车列车利用比无主动转向时小的转向盘转角即可确保牵引车前轴中心始终沿着仿真设置的360°路径行驶。

图10 转向盘转角比较
图11 和图12比较了挂车铰接点上侧向力和挂车3根轴上内侧轮胎的受力情况。图12中,N4、N5、N6分别表示半挂车前轴、中间轴和后轴的内侧车轮。由图11、图12可见,挂车主动转向使其铰接点上的侧向力、挂车弯道内侧车轮所受侧向力均降低,降幅达90%。从而显著降低了挂车对牵引车的横向干扰以及挂车轮胎的非正常磨损。
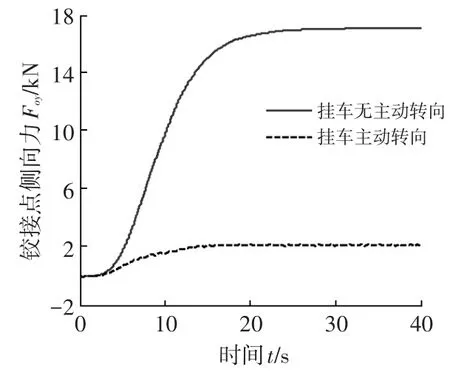
图11 铰接点上侧向力比较

图12 内侧车轮侧向力比较
图13 呈现了挂车主动转向情况下其3根轴上内、外侧车轮的转角,其中N4、N5、N6分别表示挂车前轴、中间轴和后轴的内侧车轮,W4、W5、W6分别表示相应的外侧车轮。由图13可知,挂车主动转向的半挂汽车列车在弯道行驶时,挂车车轮的转角方向与牵引车前轮转角方向相反,以减小挂车后轴中心轨迹与牵引车前轴中心轨迹间的偏差量。

图13 挂车主动转向条件下挂车车轮转角
6 结束语
本文基于驾驶员模型的焦点预瞄思想,提出了一种挂车车轮主动转向控制方法,以挂车后轴中心与牵引车前轴中心轨迹偏差最小化为控制目标,利用移位寄存器操作,设计了相应的挂车车轮主动转向控制器,并基于TruckSim与Simulink联合仿真平台,通过仿真验证了所设计控制器的有效性。仿真结果表明:所设计的控制器能有效提高挂车对牵引车路径的跟随性;挂车车轮主动转向显著减小了挂车铰接点上作用的侧向力和挂车轮胎所受的侧向力,从而有助于提高车辆行驶的稳定性,减小轮胎磨损。
