基于GIS/GPS的混合动力牵引车控制策略研究*
2018-11-22熊演峰余强闫晟煜王恒凯
熊演峰 余强 闫晟煜 王恒凯
(1.长安大学,西安 710064;2.中国第一汽车集团有限公司智能网联开发院,长春 130011)
主题词:混合动力牵引车 GIS/GPS 动态规划算法 可预见行驶
1 前言
部分国际商用车企业的混合动力牵引车产品已处于路试阶段,而国内混合动力产品主要集中在客车、乘用车领域。根据《节能与新能源汽车产业发展规划(2012-2020年)》[1],混合动力牵引车属于节能汽车,不享受新能源汽车补贴,制约其推广的主要因素是混合动力系统新增成本回收周期过长。我国山区面积占国土面积的69.1%[2],通过地理信息系统(Geographic Information System,GIS)、全球定位系统(Global Positioning System,GPS)提前探知前方道路坡度变化有助于节油,缩短混合动力系统新增成本回收周期。
Erik H等[3-4]探讨了传统牵引车基于坡度的可预见行驶节油机理;Beck R等[5-6]研究了通过简化模型、缩小可达域实现精简动态规划(Dynamic Programming,DP)算法计算量以实现整车应用;王建强等[7]提出将道路分成平路和坡道两种路况的传统车实时经济车速优化方法;Erik H等[8]分析了在传统牵引车可预见行驶控制策略中增加换挡、车速变化等惩罚因子以减少变速、换挡的可行性;Denggao Huang等[9-10]研究了基于城市循环工况,将等效油耗极值最小函数应用于插电式混合动力客车的控制策略。上述文献研究主要集中在客车、乘用车、传统牵引车领域,鲜见基于GIS/GPS的混合动力牵引车控制策略研究。
为了满足车辆智能驾驶和车队管理需求,以高精度地图为代表的GIS和GPS日益普及。本文以某款搭载GIS/GPS的并联式混合动力牵引车为研究对象,适用DP算法对HEV控制策略模型进行优化,通过理论与实证分析,验证了算法的有效性与可行性。
2 控制策略开发背景
2.1 测试工况采集与整理
运行工况是混合动力系统构型与整车控制策略制定的基础。前期采集了25辆牵引车实际运行工况数据,归类形成了牵引车工况特征数据,如表1所示。
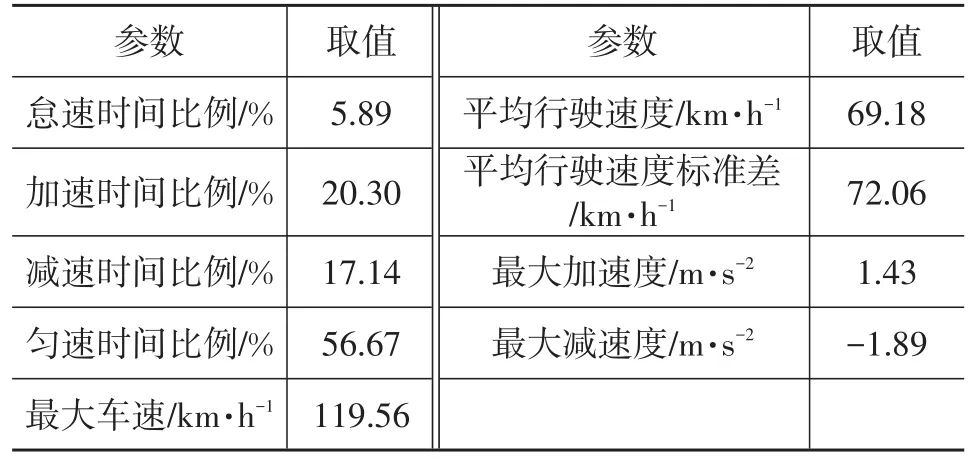
表1 牵引车样本工况特征
根据概率分布理论[11]处理所采集的运行工况数据,拟合形成了牵引车典型工况特征,如图1、图2所示。
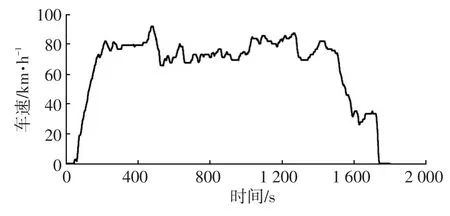
图1 牵引车车速工况特征
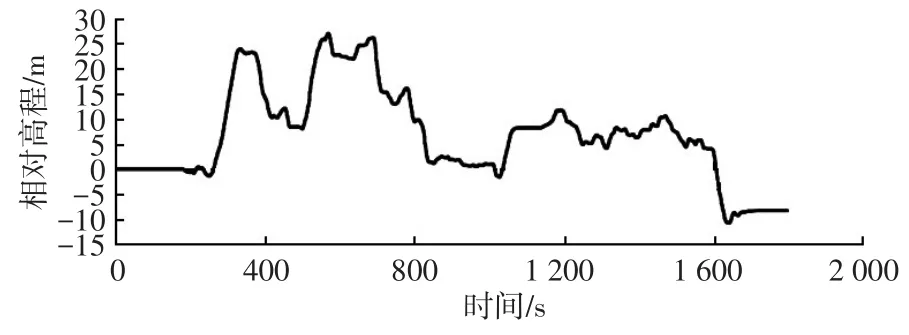
图2 牵引车相对高程工况特征
结合表1、图1可见,测试工况牵引车怠速时间比例为5.89%,加速、减速时间比例之和为37.44%,车速多集中在70~80 km/h;由图2可见,测试工况牵引车最高点与最低点的高程差可达40 m,混合动力牵引车节油机理除行车制动能量回收外,还需充分考虑势能转换。
2.2 动力系统构型及主要参数
测试车辆采用P2构型[12],如图3所示。混合动力系统主要由发动机、离合器、驱动电机、动力电池等部件组成。整车及主要总成参数如表2所示。
3 控制策略模型开发
与传统混合动力控制策略模型不同,本文提出的控制策略增加了基于GIS/GPS的可预见行驶模块,其中GIS模块具有导航电子地图基础数据、路径规划、地图匹配等功能,可将当前车辆前方道路坡度、曲率等信息提供给混合动力整车控制器(Hybrid Control Unit,HCU),HCU结合当前混合动力总成状态和前方道路特征进行扭矩分配和车速规划,控制策略架构如图4所示。
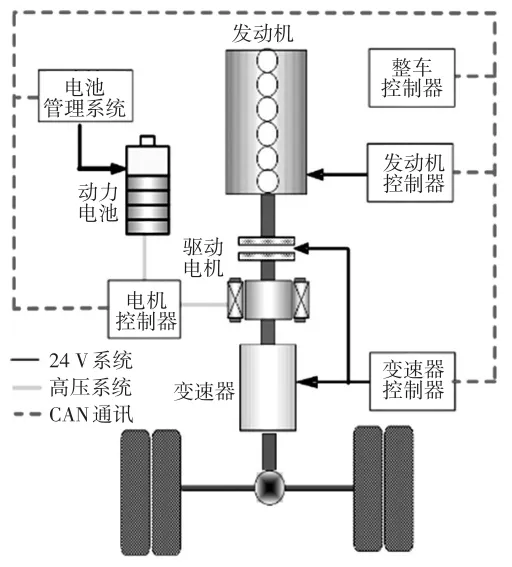
图3 混合动力牵引车动力系统构型
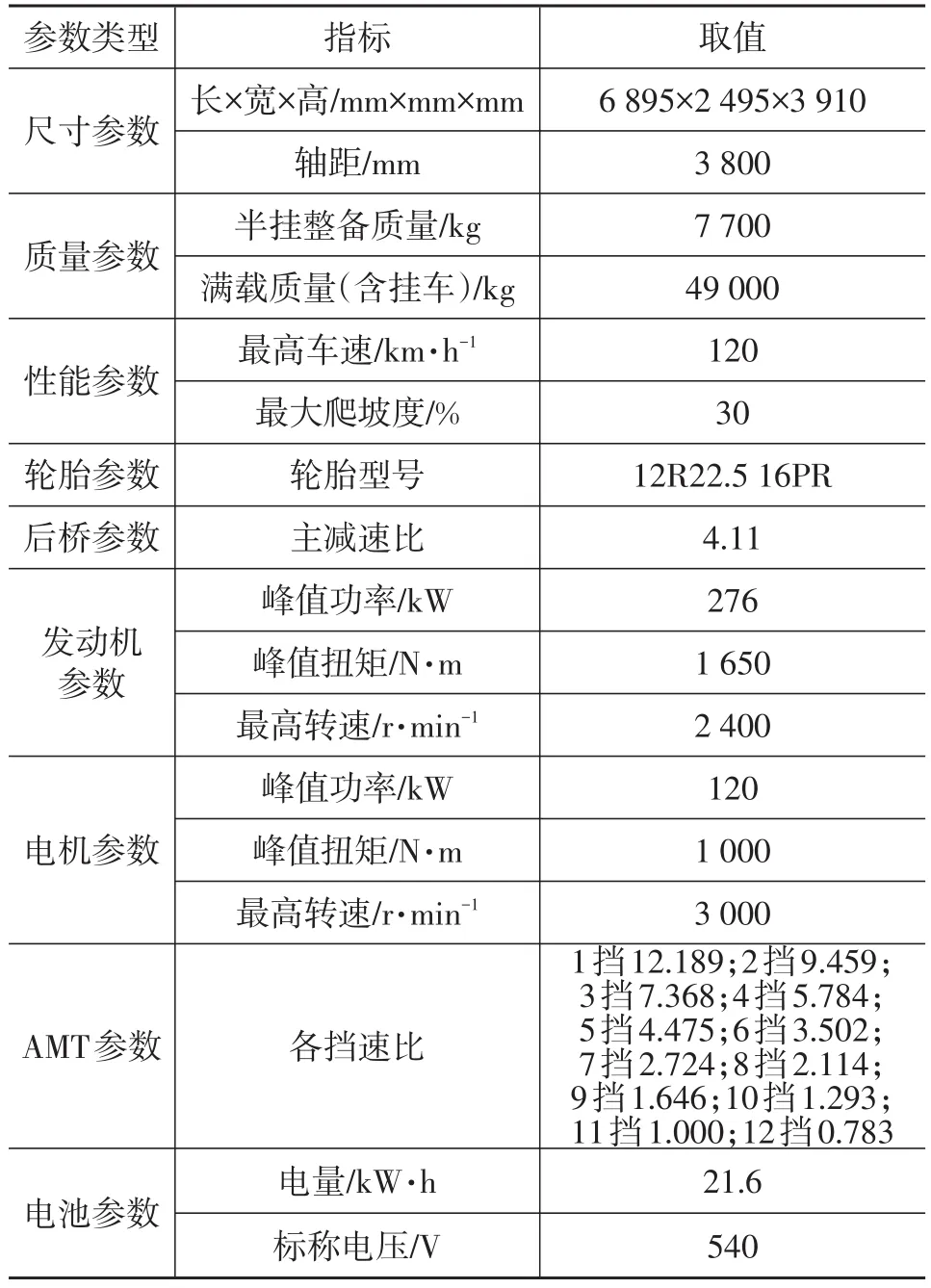
表2 整车与动力系统主要参数
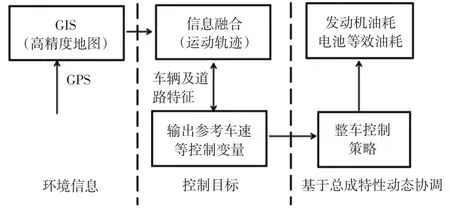
图4 控制策略开发架构
建立车辆能耗模型和纵向动力学模型,根据GIS/GPS提供的前方道路信息,通过DP算法对两模型进行寻优计算实时优化,要求运算时间满足整车实时控制需求。
3.1 策略建模理论基础
同轴并联方案采用扭矩建立能耗方程,能耗模型全局优化问题可描述为:将前方可探知道路划分为若干阶段,根据每一阶段的行驶扭矩需求,从初始状态x0到最终状态xk,搜索最优控制变量uk,使整个循环工况燃油消耗量最小,混合动力系统全局优化的目标函数可表达为:

式中,Q(k)为k时刻混合动力系统等效油耗;Q̇fc为发动机燃油消耗率;SȮC为电池在k时刻前后改变值;p为电池电量与油耗的等价常数;Te为发动机输出扭矩;we为发动机转速;Tm为电机输出扭矩;wm为电机转速。
假定发动机已完全预热,发动机燃油消耗率视为发动机转速和扭矩的静态函数。由式(1)可知,目标函数包括两部分,第1项是发动机稳态模型的燃油消耗,第2项是电池电量消耗,通过电池电量与油耗的等价常数p将电池电量折算成燃油消耗量。
同轴并联方案的汽车动力学模型可表达为:
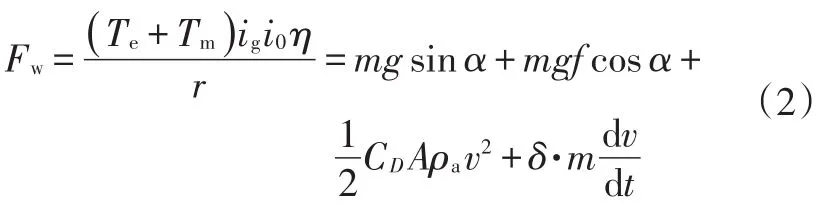
式中,Fw为整车牵引力;ig为变速器速比;i0为后桥主减速比;η为传动系效率;r为轮胎滚动半径;m为整车质量;α为道路坡度;f为滚动阻力系数;CD为空气阻力系数;A为整车迎风面积;ρa为空气密度;v为车速;δ为旋转质量系数。
假设离合器、传动轴等为刚体,将混合动力系统扭矩等价传递至轮胎,其与轮胎转动惯量之和记为J1,ww为车轮转速,有

将式(2)、式(3)结合,可得:
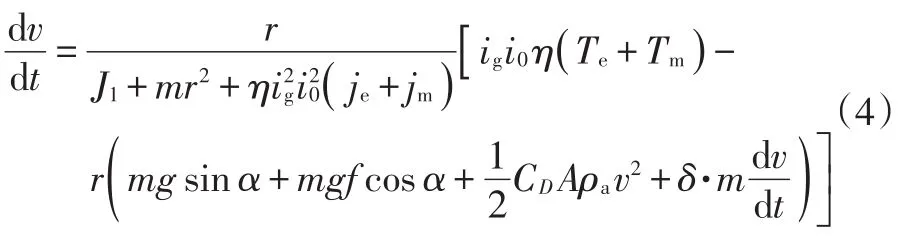
式中,Je为发动机转动惯量;Jm为电机转动惯量。
混合动力牵引车以巡航车速行驶时,依托GIS/GPS探知前方道路出现坡道,进行实时车速优化和扭矩分配,即局部优化。局部优化的理论基础是Bellman最优化原理[13],通过DP算法实现,无论初始状态和初始决策如何,当把其中任何一级及其状态作为初始级和初始状态时,其余决策必定也是最优策略,因此将局部车速优化和扭矩分配整理为始、末状态均已知的动态规划问题。将车辆纵向动力学方程式(4)按空间离散:

系统的代价函数中,从k阶段状态到下一阶段状态的代价Uk和系统总代价Q分别为:
系统约束条件为:
式中,Δs为相应阶段内车辆行驶距离;N为系统总步长;Vret为设定车速;ΔV为车速允许波动范围;SOCmin、SOCmax分别为当前阶段电池电量允许可达下限、可达上限;Temin、Temax分别为当前阶段发动机扭矩允许可达下限、可达上限;Tmmin、Tmmax分别为当前阶段电机扭矩允许可达下限、可达上限。
3.2 节油机理分析
车辆进入可预见行驶模式后求解车速规划和扭矩分配问题,即在满足整车扭矩需求和车速在一定区间的前提下,求解某一阶段混合动力系统等效油耗最小值。可预见行驶模块根据极小值原理,采用DP算法求解多级决策优化问题。HCU通过GIS/GPS探知前方道路信息和当前所在位置,以模型预测控制为框架,通过DP逆序算法实现在线滚动优化控制。
实车控制中,HCU可通过动力电池SOC调整及相应电机功率调节主动适应坡道变化,坡道行驶过程中通过减少发动机瞬态变化和途中换挡次数,尽量降低机械制动强度等措施提高节油率。算法基于系统数学模型构建,获得系统全局最优控制变量,因计算量大,通过牛顿迭代法将系统全局简化成若干个阶段局部优化,同时根据动力总成特征缩小可达域,降低计算量,满足实时控制需求。
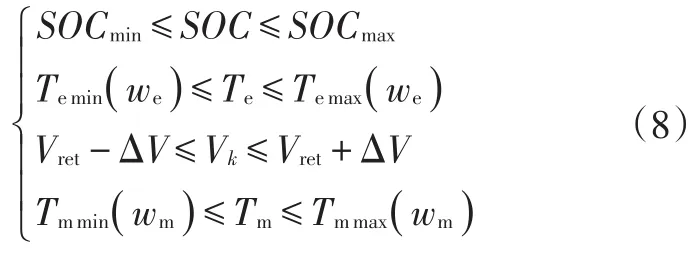
传统混合动力控制策略仅能针对当前驾驶员意图和混合动力总成状态瞬时优化,不能预知未来需求,动力电池在任一时刻需同时满足制动充电和驱动用电需求,所以充、放电区间较小,不能充分发挥混合动力系统节油潜力。可预见行驶模块节油机理如图5所示。
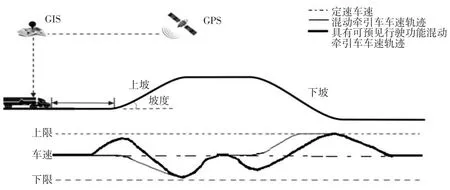
图5 可预见行驶的混合动力节油机理
传统车仅有发动机1个动力源,因此可预见节油效果有限。3种类型整车节油机理的对比结果如表3所示。

表3 不同类型整车节油机理比较
4 算法流程及道路试验
4.1 动态规划算法流程
触发巡航开关进入可预见行驶模式,GIS/GPS根据当前位置和目的地信息,生成含相对高程和道路曲率的运动轨迹,离散成车辆当前所在采样点和视距内一系列采样点,采用牛顿迭代法按道路坡度变化情况对采样点分段聚类,因当前采样点与坡度变化所在采样点状态已知,通过逆序DP算法可确定下一个采样点的参考挡位、参考平均车速,并持续滚动更新,流程如下:
a. 模式激活。仪表设有巡航开关,可设定目标车速和车速区间,结合电池电量,试验车速采用75±10 km/h。
b.运动轨迹聚合归类。完成初始化激活后,基于GIS/GPS开展路径规划,考虑总成能力和计算周期需求,前方探测视距定为2 km,划分成60个采样点,其中前1 km每25 m取1个采样点,后1 km每50 m取1个采样点。考虑测量精度,当坡度α>1%时视为上坡,当-1%≤α≤1%时视为平路;当α<-1%时视为下坡。根据坡度α的区间分布,将前方60个采样点聚合成i段(i≥1),聚合归类后的运动轨迹如图6所示。
c.控制策略实施:将可预见行驶模式下全局最优控制变量数列简化成当前采样点至坡度变化所在采样点之间的局部最优控制变量数列。当前60个采样点已聚合归类成i段运动轨迹,由图6知,对i=1段,有k个采样点,根据坡路类别、SOC和车速变化是否覆盖相对高程变化,开发相应控制策略,如表4所示。

图6 运动轨迹聚合归类
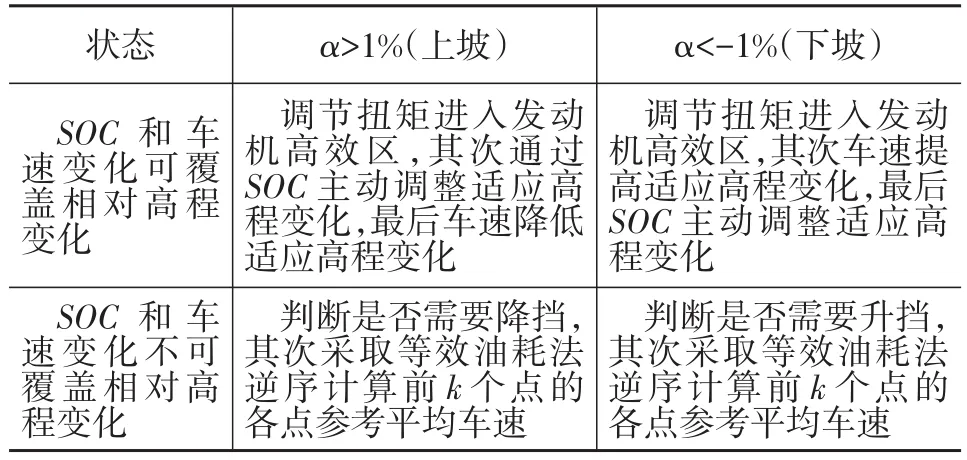
表4 不同路况对应整车控制策略
d.逆序算法寻优:为了简化动态规划求解过程,系统状态变量定义为当前车速与挡位、电池SOC,系统控制变量定义为当前采样点至下一采样点目标车速、目标挡位,为了降低计算量,将车速变化简化为有限网格,取速度间隔Δv=0.3 km/h,如图7所示。

图7 动态规划寻优
由于巡航车速设为75±10 km/h,根据表2和式(8),相应挡位速比分别为1.29、1.00和0.78,发动机转速相应范围为1 000~2 100 r/min,考虑电池总成特性,SOC区间取30%~90%。通过上述限制,可有效降低DP算法计算量,压缩计算时间。
在上述条件约束下,计算i=1段,即从第k点开始至第1点结束,计算各采样点最优解,持续滚动更新即可获得可预见行驶模式下全局的参考挡位和车速,实现车辆的实时预测控制。
4.2 道路试验结果
在S102公路长春至桦甸段开展可预见行驶功能的道路试验。基于国内某地图公司的高精度地图完成试验路段的三维道路信息获取及坡度计算,如图8所示。实际道路试验中,车速、相对高程随里程的分布如图9所示。

图8 S102长春-桦甸段经、纬度与坡度联合分布

图9 车速、相对高程的历程分布
测试路段长度为185.48 km,可预见行驶功能模式下全程平均车速75.6 km/h,运行时间与传统车相当;混合动力牵引车基础油耗为34.76 L/100 km,可预见行驶模式下测试油耗为33.09 L/100 km,节油率为4.8%。参照巡航车速和各总成控制周期的需求,最大允许规划用时小于1 s[14]即可满足整车需要。不同路况对应规划用时如表5所示,从表5可知,DP算法运算时间满足整车实时控制需求。
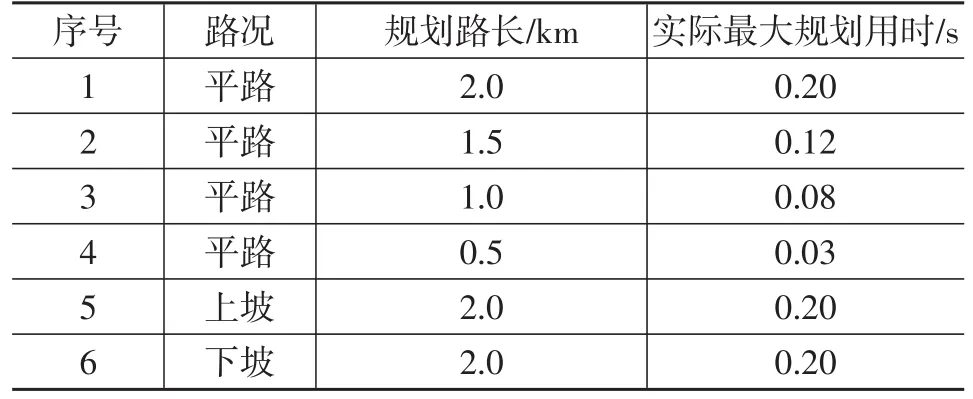
表5 不同路况对应规划用时
5 结束语
本文分析了基于混合动力系统的可预见行驶节油机理,利用动能和势能转化、电池主动充放电、车速主动调整等手段挖掘混合动力系统节油潜力,根据整车和混合动力系统总成状态压缩可达域,通过对路径轨迹聚合归类、采样点步长可变等手段缩短DP算法运算时间。试验结果表明,提出的控制策略有助于提高节油率,运算时间满足整车实时控制需求。
可预见行驶信号来自于GIS/GPS,而非雷达、摄像头等传感器,随着GIS/GPS的日益普及,新增成本逐步降低,有助于缩短混合动力系统新增成本的回收周期。
