智能移乘护理机器人设计
2018-11-21倪忠园刘梦飞周磊
倪忠园 刘梦飞 周磊
摘 要:为了帮助护理人员对下肢行动不便的病人进行空间上的位置转移,设计出一款智能移乘护理机器人,可以在护理工的帮助使用下对病人实现抱起,移动,放下等动作。文章重点介绍了该智能移乘护理机器人的机械结构和液压传动系统,机械结构方面主要分为三大模块:伸缩机构,胸部支承和驱动装置;液压传动系统部分主要是对液压传动系统原理图进行了说明。
关键词:智能移乘;结构设计;液压传动;控制系统
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2018)28-0104-03
Abstract: In order to help the nursing staff to carry on the spatial position shift to the lower limb movement inconvenient patient, this paper designs a kind of intelligent moving nursing robot, which can lift, move, and lay down the patient with the help of the nursing worker. This paper mainly introduces the mechanical structure and hydraulic transmission system of the intelligent moving and multiplying nursing robot. The mechanical structure is mainly divided into three modules: telescopic mechanism, chest support and driving device. Hydraulic transmission system is the main part of the hydraulic transmission system schematic diagram were described.
Keywords: intelligent transfer and multiplication; structural design; hydraulic transmission; control system
1 概述
隨着科学技术跨时代的巨变,加上老龄化人口与日俱增,2015年全国1%人口抽样调查数据显示,60岁以上人口为2.2亿,65岁及以上人口占总人口的比例为10.47%,这说明我国老龄化形势十分严峻[1]。近年来,各国对老年人和一些肢体有残疾的弱势群体有了更多的关注。我国在逐渐崛起成为经济大国的同时,人们对精神上的要求也逐渐提高,希望能通过现代的科学技术改善现有的生活质量。医疗护理,生活照料等行业将迎来发展的黄金时期,使用机器人辅助治疗既有利于病人的身心健康发展,又有利于激发护理工作者的工作热情[2-4]。
日本机器人技术发展迅速,越来越多的护理机器人已经投入到使用当中,例如有Robear机器人,TEMLX2的机器人,twendy-one护理机器人等[5]。国内,河北工业大学的“白泽”机器人正式发布,这是中国护理机器人研发的重要转折点,是年老体弱者和下肢不便者人群的福音,但还处于实验室阶段。因此本文研究设计了一种以液压为驱动力的智能移乘护理机器人,可以在护理工无需弯腰的情况下对被护理者进行空间上的移位。
2 总体设计方案
本设计中的智能移乘护理机器人主要用于医院和理疗机构,主要能对下肢瘫痪或者下肢运动不便的人员进行抱起和移动。在设计时假定被转移者的最大体重为100kg,通过一些普通的病床尺寸和一些病人用的轮椅的尺寸的收集,以此为基础来参考设计该移乘装置。当智能移乘护理机器人用于实际中时,主要考虑的应该是运行过程中的平稳问题和被移乘者的舒适程度。由于液压系统具有输出力矩大、调速范围广、操作简单、缓冲减震而且可以实现无级调速的优点[6],因此在设计中采用液压传动系统。
在设计时,该智能移乘机器人主要实现的就是抱紧,抱起,移位和放下的动作。根据这些所要实现的功能来完成该装置各个部件的设计。例如抱紧这个动作主要是通过胸部支承内部的双活塞液压缸来实现的;抱起主要是通过伸缩机构来带动支承臂的旋转来实现的。通过三维软件建模,可以得到图1所示的立体模型:
智能移乘机器人的工作原理概述:首先由控制部分发出指令,智能移乘机器人移动到被护理者的前方,胸部支承将人抱紧,接着支承臂在伸缩机构的带动下将人抱起,抱起至最高点时,移乘机器人开始移动至目的地,到达目的地之后将人缓缓地放下来,完成此次移乘的过程。为了更加清楚地叙述这个移乘过程,绘制二维平面运行轨迹如图2所示。
3 机械结构设计
3.1 伸缩机构
在该支援装置中,伸缩机构其实是单活塞液压缸,利用单活塞杆液压缸的伸出或者收缩来带动支承臂的摆动,从而实现将人抱起的动作。通过对支援装置的简化,以及各个初始参数以及受力分析可以得到单活塞液压缸的最大负载力,具体分析过程如下:
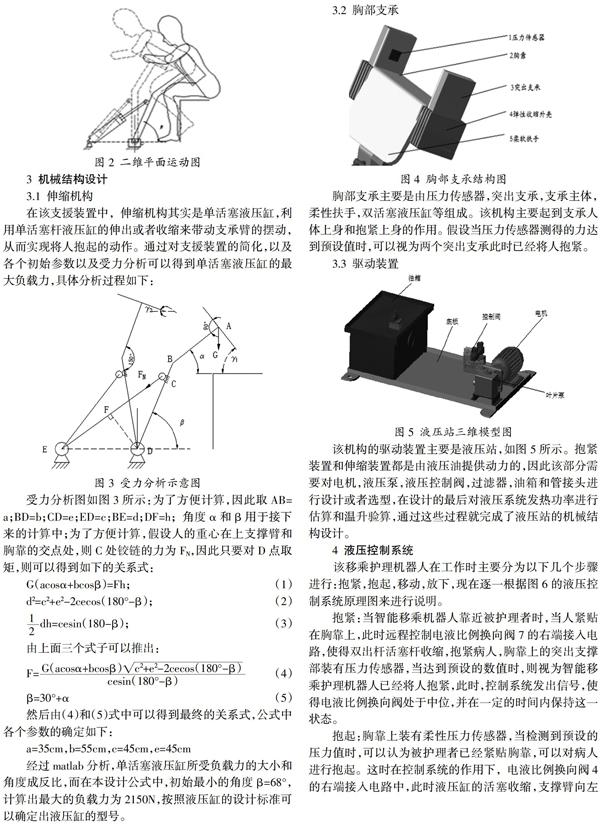
胸部支承主要是由压力传感器,突出支承,支承主体,柔性扶手,双活塞液压缸等组成。该机构主要起到支承人体上身和抱紧上身的作用。假设当压力传感器测得的力达到预设值时,可以视为两个突出支承此时已经将人抱紧。
3.3 驱动装置
该机构的驱动装置主要是液压站,如图5所示。抱紧装置和伸缩装置都是由液压油提供动力的,因此该部分需要对电机,液压泵,液压控制阀,过滤器,油箱和管接头进行设计或者选型,在设计的最后对液压系统发热功率进行估算和温升验算,通过这些过程就完成了液压站的机械结构设计。
4 液压控制系统
该移乘护理机器人在工作时主要分为以下几个步骤进行:抱紧,抱起,移动,放下,现在逐一根据图6的液压控制系统原理图来进行说明。
抱紧:当智能移乘机器人靠近被护理者时,当人紧贴在胸靠上,此时远程控制电液比例换向阀7的右端接入电路,使得双出杆活塞杆收缩,抱紧病人,胸靠上的突出支撑部装有压力传感器,当达到预设的数值时,则视为智能移乘护理机器人已经将人抱紧,此时,控制系统发出信号,使得电液比例换向阀处于中位,并在一定的时间内保持这一状态。
抱起:胸靠上装有柔性压力传感器,当检测到预设的压力值时,可以认为被护理者已经紧贴胸靠,可以对病人进行抱起。这时在控制系统的作用下,电液比例换向阀4的右端接入电路中,此时液压缸的活塞收缩,支撑臂向左旋转,将人抱起至目标的高度。
移动:当支承臂的角位移旋转至目标值时,角位移传感器将位移的信息反馈至控制系统,此时电液比例换向阀4的中位接入到回路中,被护理者保持这个姿势,智能移乘机器人载着被护理人向目标地移动。
放下:当到达控制系统所设置的目的地时,此时电液比例控制阀4的左端接入回路中,液压缸的活塞杆伸长,从而将人放到椅子上或者是护理床上,电液比例控制阀7的左端接入电路,双活塞液压缸的两个活塞杆伸出,将人松开,这样就完成了整个移位的过程。
5 结束语
本次设计的智能移乘护理机器人主要是用来协助护理工对被护理者进行移位,减轻护理工的工作强度,能够有更多的精力與被护理者进行情感上的交流。本文主要是对机械结构和传动系统进行了设计,采用液压系统进行传动,虽然平稳性较好,动作灵敏,但是液压油容易受到温度的影响,采用自动化的温控技术可以取得更好的效果,另外增加自动升降的结构可以增加使用范围。
参考文献:
[1]蔺轲,谢俊卿,孔桂兰.老年健康护理机器人的需求[J].中国信息界,2018:90-93.
[2]张向颖.重障者洗浴辅具设计-移乘装置的设计[D].天津:天津科技大学,2012:1-2.
[3]孙岳.基于设计事理学的老年人护理机器人设计探究[D].河北:燕山大学,2016:1-2.
[4]杨清哲.人口老龄化背景下中国农村老年人养老保障问题研究[D].吉林:吉林大学,2013:1-2.
[5]张晓玉.智能辅具与机器人技术[N].机器人技术与应用,2011-9-30.
[6]张桐.船用减摇起重机液压系统设计与仿真研究[D].辽宁:大连海事大学,2018:11-13.
